rtos主要面对的问题有三个方面:1.任务管理 2.任务调度器 3.时间片切换
任务管理
主要需要管理任务状态以及任务列表的管理,一下是几个元素:
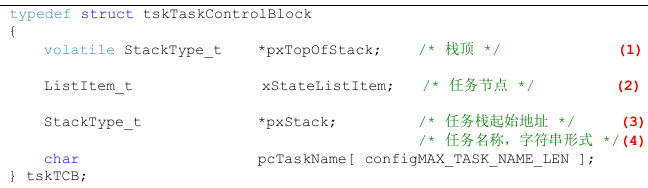
1.tcb 任务控制块:1.栈顶(从数组最后一位开始压栈)2.任务节点 3.栈起始地址 4.任务名称
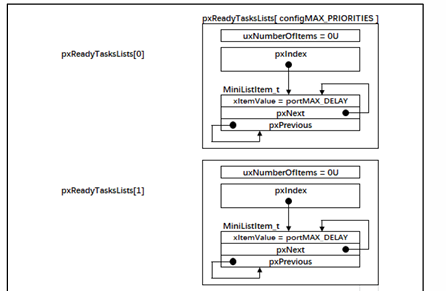
2.任务就绪列表,是一个数组,每一个数组的下标表示当前的任务优先级,优先级相同的任务插入相同的任务就绪列表中的数组元素。
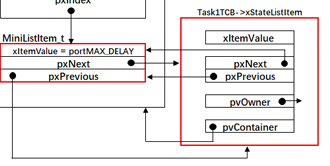
如何理解tcb和任务就绪列表的关系?我们只需要知道tcb是用来切换任务的,只需要回答如何在就绪列表中找到tcb这个问题即可。
首先tcb中的xstateklist会在 prvInitialiseNewTask() 中的 list_list_item_owner函数添加归属的tcb

接着插入到指定的就绪列表中,调用的时候只需要遍历list中从响应的xstatelistitem中获取owner(tcb)即可
任务调度器
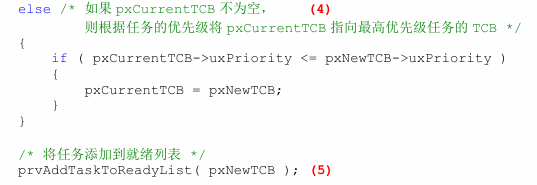
1.初始化调度器,一般是将当前tcb指向最高任务优先级tcb(最小数组序号最小),一般是在插入优先级就绪列表的时候边插入边更新。
2.如何调度,使用了两个中断: svc(m0内核没有)和pendsv
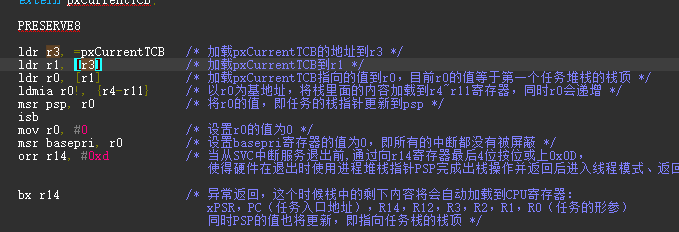
2.1 svc
主要是将tcb中存储的栈信息全部读出。
ldr r3, =pxCurrentTCB ; 1. r3 = 变量 pxCurrentTCB 的地址
ldr r1, r3 ; 2. r1 = pxCurrentTCB 的值,即 当前TCB结构体的起始地址
ldr r0, r1 ; 3. 从`TCB起始地址`读取4字节,得到的就是第一个成员 `pxTopOfStack` 的值
对于bx r14的解释:

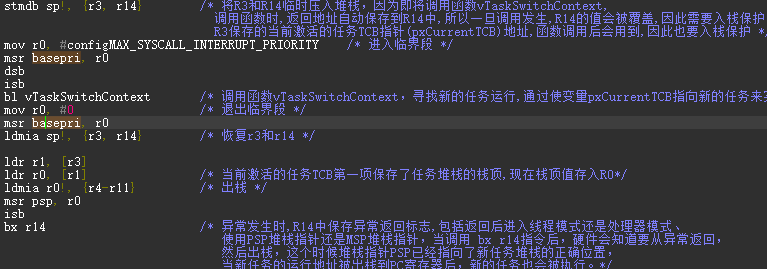
2.2 pendsv
主要执行vtaskswitchcontext来获取当前任务的tcb
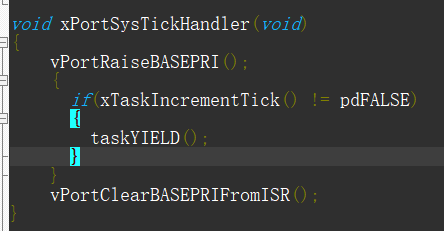
任务时间片切换
systick起头