topic 工具的使用
启动turtlesim
ros2 run turtlesim turtlesim_node
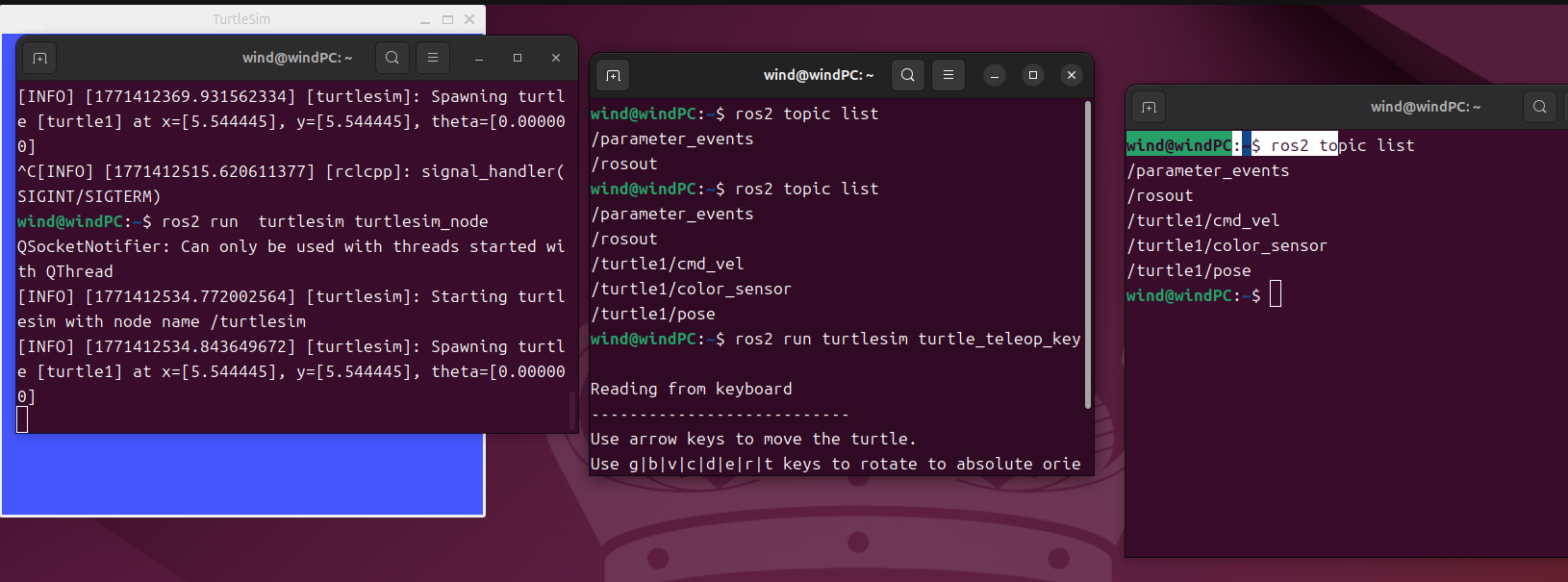
查看哪些频道在广播
ros2 topic list让小乌龟运动
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist \'linear:\^J\ \ x:\ 1.0\^J\ \ y:\ 0.0\^J\ \ z:\ 0.0\^Jangular:\^J\ \ x:\ 0.0\^J\ \ y:\ 0.0\^J\ \ z:\ 0.0\^J\'rqt查看数据流向
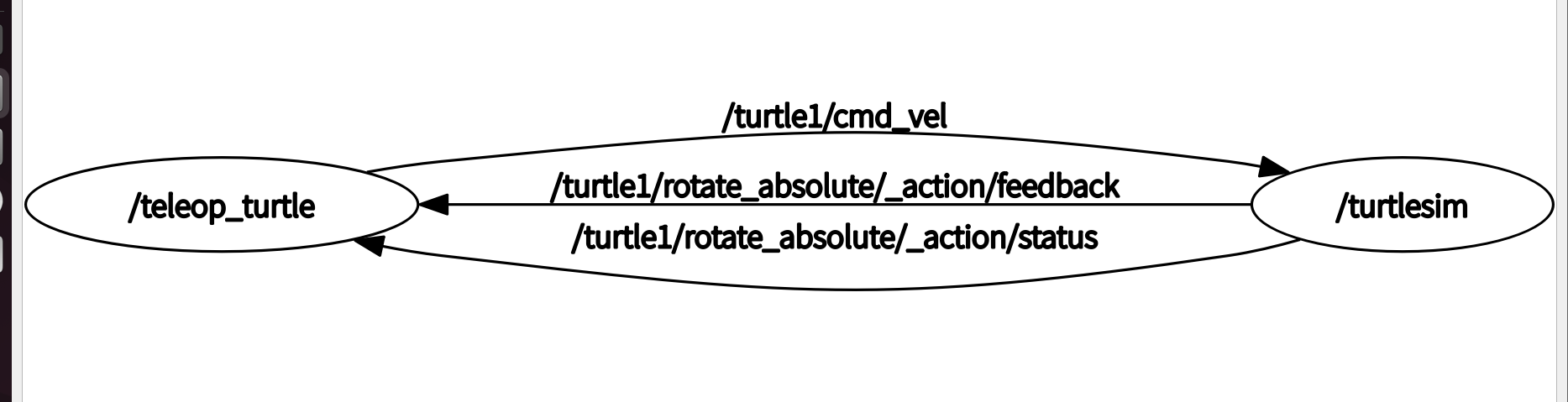
查看节点与数据之间的关系
ros2 run rqt_graph rqt_graph 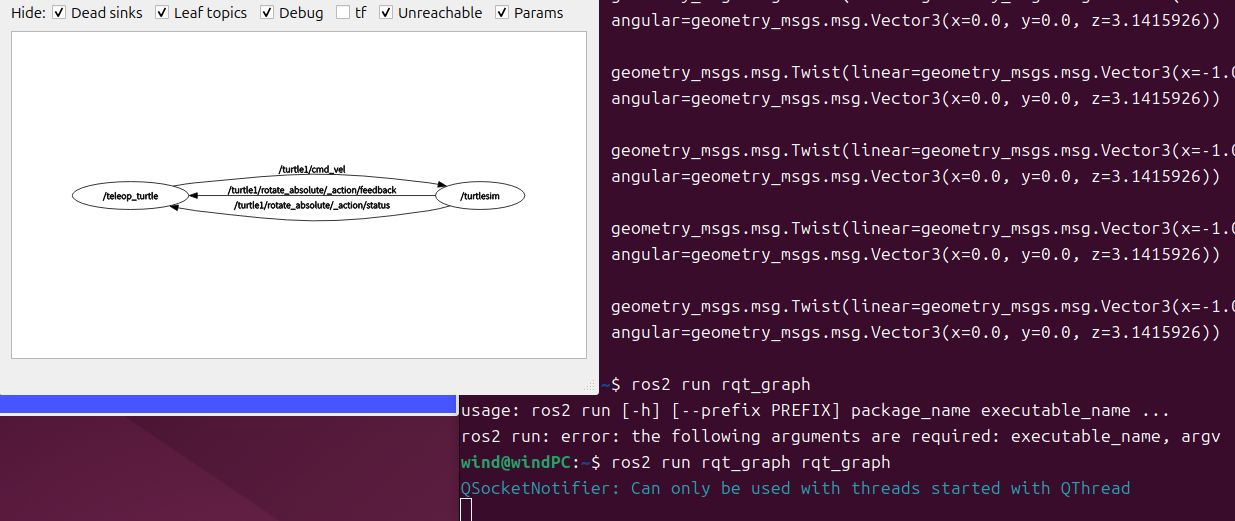
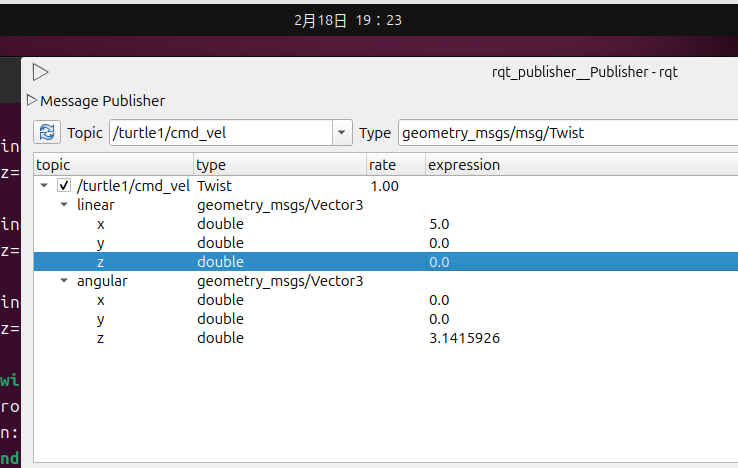
发布消息
ros2 run rqt_publisher rqt_publisher可以修改里面的值
代码实现小乌龟控制
1、创建新的节点和包
ros2 pkg create --build-type ament_python --node-name turtle_ctrl_no
de turtle_pkg 问ai的提示词
帮我为 \home\wind\dev_ws\src\turtle_pkg\turtle_pkg\turtle_ctrl_node.py 实现节点创建,以及为以及为节点提供publisher功能,publisher要求给小乌龟发送速度控制指令
2、写代码(python)
3、配置setup.py
4、使用build进行编译构建
colcon build --packages-select turtle_pkg5、Source刷新环境
source install/setup.bash GUI方式结合AI实现需求
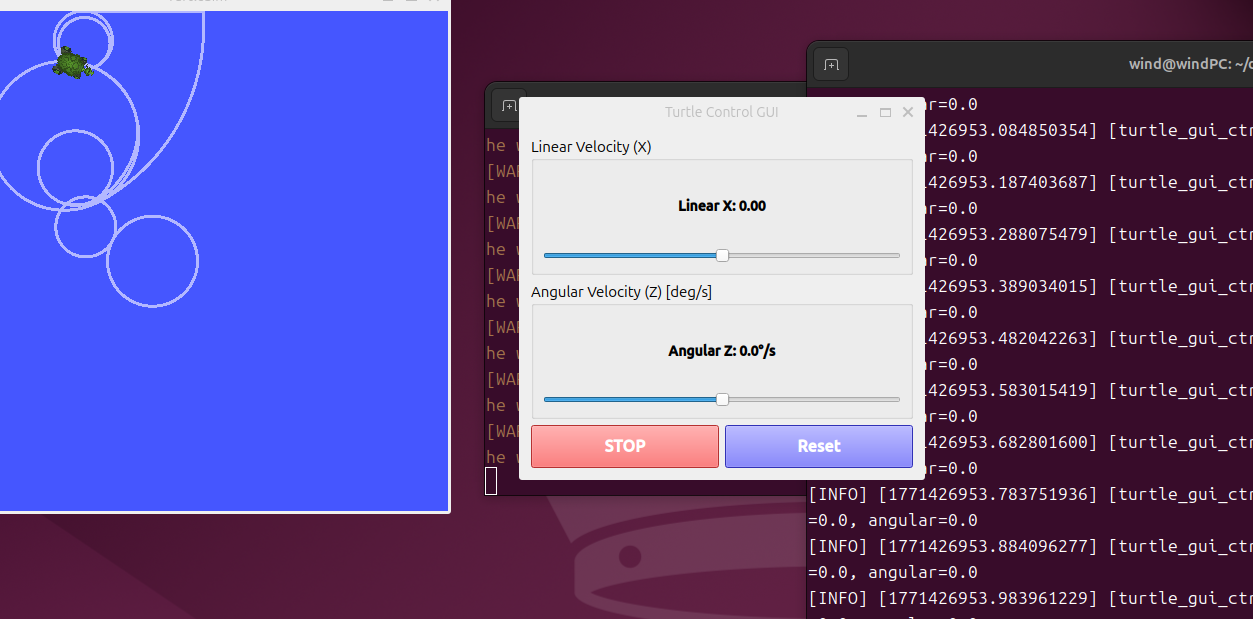
问ai的提示词
帮我实现一个小乌龟控制节点取名叫做turtle_gui_ctrl_node.py,参考 \home\wind\dev_ws\src\turtle_pkg\turtle_pkg\turtle_ctrl_node.py 实现的内容,但是要结合图形化实现控制小乌龟的线速度和角速度,要求使用pyqt进行实现
查看所有的主题列表
ros2 topic list 查看相关主题的内容
ros2 topic info /turtle1/pose 查看启动节点
ros2 node list实时监听打印话题的数据
ros2 topic echo /turtle1/poseAI实现实时监控小乌龟位置
ai提示词
帮我创建一个节点,取名为turtle_advce_ctrl_node,需要参考 \home\wind\dev_ws\src\turtle_pkg\turtle_pkg\turtle_gui_ctrl_node.py 的实现,并而外实现小乌龟pose的订阅,要求实现的gui输入值为线速度、角速度,实时输出,当前x的坐标,y的坐标,当前线速度,当前角速度,当前角度的信息