CVRP 的 MIP 建模 | 六种模型、LP 松弛层级与求解极限
作者:Sebastilan & Claude(AI 协作)
问题背景
这是 BPC 学习系列的第二篇。上一篇介绍了 Dantzig & Ramser (1959) 的经典启发式方法。本篇用 MIP(混合整数规划)精确求解 CVRP,用实验数据回答:现代求解器能直接解决多大规模的 VRP? 下一篇将进入列生成(Column Generation),即 BPC 的核心。
Dantzig 的启发式在 12 站实例上得到了 294(最优推测 290)。如果我们想证明最优性------确认不存在更好的解------就需要精确方法。
最直接的精确方法是 MIP 建模:把 CVRP 写成整数规划,交给 Gurobi / CPLEX 等商业求解器。问题是,这条路能走多远?
本文的工作:
- 梳理 CVRP MIP 的完整版图:六大模型家族及其理论层级
- 实现全部六种模型:MTZ、SCF、2CF、MCF、DFJ、SP,depot 约束统一用 \\geq K_{\\min}(无限车队假设)
- 27 个实例 × 多模型实测:用数据回答 LP 松弛强度差异和 MIP 求解天花板
CVRP 问题定义
CVRP(Capacitated Vehicle Routing Problem):给定一个仓库和 n 个客户,每个客户有需求 d_i,每辆车容量为 Q,求总距离最短的路线集合,使得:
- 每个客户恰好被一辆车访问
- 每条路线从仓库出发、回到仓库
- 每条路线上客户需求总和 \\leq Q
关键澄清:车辆数不是输入 。标准 CVRP 假设无限同质车队(Toth & Vigo, 2014),车辆数由优化自然决定。唯一的硬约束是每条路线不超载。
CVRPLIB 惯例 :实例名中的 K(如
E-n13-k4的 K=4)是已知最优解使用的车辆数,不是问题的输入参数。在建模时,我们用 K_{\\min} = \\lceil \\sum_{i \\in C} d_i / Q \\rceil(bin packing 下界)作为车辆数的下界约束。需求假设:标准 CVRP 假设每个客户的需求不超过车辆容量(d_i \\leq Q),即单辆车就能服务任何一个客户。若 d_i \> Q,则需要多辆车协作配送(Split Delivery VRP),模型结构会根本改变。本文仅讨论标准 CVRP。
CVRP MIP 分类全景
CVRP 的 MIP 模型按其变量结构和 LP 松弛强度可分为六大家族。Letchford & Salazar-González (2006) 通过投影关系严格证明了它们之间的理论层级:
\\text{MTZ} \\;\\leq\\; \\text{SCF} \\;=\\; \\text{2CF} \\;\\leq\\; \\text{MCF} \\;\\leq\\; \\text{DFJ+cuts} \\;\\leq\\; \\text{SP}
其中 A \\leq B 表示 B 的 LP 松弛不弱于 A(LP bound 更紧或相等)。
| 家族 | 代表文献 | 变量类型 | 约束规模 | LP 松弛强度 |
|---|---|---|---|---|
| MTZ | Miller, Tucker & Zemlin (1960) | 弧 x_{ij} + 序变量 u_i | 紧凑 O(n\^2) | 最弱 |
| SCF | Gavish & Graves (1978) | 弧 x_{ij} + 单一流 f_{ij} | 紧凑 O(n\^2) | 中等 |
| 2CF | Baldacci et al. (2004) | 弧 x_{ij} + 二商品流 | 紧凑 O(n\^2) | = SCF |
| MCF | Letchford & Salazar-González (2015) | 弧 x_{ij} + 多商品流 f\^k_{ij} | 大 O(n\^3) | 较强 |
| DFJ+cuts | Laporte, Nobert & Desrochers (1985) | 弧 x_{ij} + 容量 SEC | 指数 2\^n | 较强 |
| SP | Christofides, Mingozzi & Toth (1981) | 路线 \\lambda_r | 指数 $ | \Omega |
要点:
- 紧凑 vs. 指数:MTZ/SCF/2CF/MCF 约束数多项式级,可直接交给求解器;DFJ 和 SP 约束/变量数指数级,需要分离算法或列生成。
- SCF = 2CF:Letchford & Salazar-González (2006) 证明两者的 LP 松弛通过投影完全等价。
- DFJ+cuts 的 "cuts":Laporte et al. (1985) 的两下标模型本身只有度约束,加上 Rounded Capacity Inequalities(RCI)后才获得较强的 LP 松弛。
- SP 最强:Set Partitioning 的 LP 松弛是所有弧变量模型的上界,这正是 BPC 方法的理论基础。
本文实现全部六种模型,用实验数据验证上述理论层级。
统一记号与共享框架
| 符号 | 含义 |
|---|---|
| V = {0, 1, \\ldots, n} | 节点集合,0 为仓库 |
| C = {1, \\ldots, n} | 客户集合 |
| Q | 车辆容量 |
| d_i | 客户 i 的需求量 |
| c_{ij} | 从 i 到 j 的行驶距离 |
| x_{ij} \\in {0,1} | 是否使用弧 (i,j) |
| K_{\\min} = \\lceil \\sum_{i \\in C} d_i / Q \\rceil | 车辆数下界 |
前五种弧变量模型(MTZ/SCF/2CF/MCF/DFJ)共享目标函数和度约束。区别在于如何消除子巡回并执行容量约束------在 CVRP 中,这两件事是紧密耦合的:子巡回消除保证路线连通(必须经过仓库),容量约束保证路线可行(总需求不超载),各模型的辅助变量和约束同时处理这两个需求:
\\begin{array}{llll} \\min \& \\displaystyle\\sum_{i \\in V} \\sum_{j \\in V, j \\neq i} c_{ij} x_{ij} \& \& \\text{(0) 最小化总距离} \\\[0.8em\] \\text{s.t.} \& \\displaystyle\\sum_{i \\in V, i \\neq j} x_{ij} = 1 \& \\forall\\, j \\in C \& \\text{(1) 每个客户入度 = 1} \\\[0.8em\] \& \\displaystyle\\sum_{j \\in V, j \\neq i} x_{ij} = 1 \& \\forall\\, i \\in C \& \\text{(2) 每个客户出度 = 1} \\\[0.8em\] \& \\displaystyle\\sum_{j \\in C} x_{0j} \\geq K_{\\min} \& \& \\text{(3) 至少 $K_{\\min}$ 辆车出发} \\\[0.8em\] \& \\displaystyle\\sum_{j \\in C} x_{j0} \\geq K_{\\min} \& \& \\text{(4) 至少 $K_{\\min}$ 辆车返回} \\end{array}
注意,上述共享框架仅包含度约束 (每个客户恰好一进一出)和仓库约束 (至少派出 K_{\\min} 辆车)。它既不消除子巡回,也不限制路线容量。子巡回消除和容量约束由各模型通过各自的辅助变量分别实现。
为什么用 \\geq K_{\\min} 而非 = K?
增加车辆数可以减少总距离------多一辆车意味着更灵活的路线划分。用 = K 强制固定车辆数,等于给了求解器额外的先验信息(最优解恰好用 K 辆车),人为收紧了 LP 松弛,使求解效果被高估。实验中我们也确实观察到:放松为 \\geq K_{\\min} 后,某些实例的最优解使用了比实例名中 K 更多的车辆,总距离反而更短。
六种模型
MTZ(Miller-Tucker-Zemlin, 1960)
引入辅助变量 u_i 表示车辆到达客户 i 时的累计载重。通过 big-M 型约束,强制路线上的 u 值单调递增,从而排除子巡回并限制路线容量。
MTZ 约束最初为 TSP 提出。将 u_i 重新解释为累计载重以同时消除子巡回和执行容量约束,是后续 CVRP 文献的标准做法。Kara, Laporte & Bektas (2004) 提出了 lifted 版本,在原始约束基础上追加一项反向弧信息:
u_j \\geq u_i + d_j - Q(1-x_{ij}) + (Q - d_j - d_i) \\cdot x_{ji}
理解 lifted 版本的关键:x_{ij} 和 x_{ji} 不能同时为 1(同一对客户之间不会双向行驶)。分三种情况讨论:
- x_{ij}=1, x_{ji}=0(i \\to j 被使用):约束变为 u_j \\geq u_i + d_j,与原始版本一致------路线上载重递增。
- x_{ij}=0, x_{ji}=1(j \\to i 被使用,即 j 在 i 之前):约束变为 u_j \\geq u_i + d_j - Q + (Q - d_j - d_i) = u_i - d_i。这比原始版本(u_j \\geq u_i + d_j - Q,几乎无约束力)紧得多------它利用了"j 在 i 前面"的信息,把 big-M 松弛从 Q 收紧到 d_i。
- x_{ij}=0, x_{ji}=0(i, j 不直接相连):约束变为 u_j \\geq u_i + d_j - Q,退化为弱约束,与原始版本相同。
核心思想:原始 MTZ 对 x_{ij}=0 的情况一律用 big-M = Q 松弛,lifted 版本在反向弧激活时能把松弛量大幅缩小,从而在 LP 松弛中提供更多约束力。我们的实现使用基础版本。
\\begin{array}{llll} \& u_j \\geq u_i + d_j - Q(1 - x_{ij}) \& \\forall\\, i, j \\in C,\\, i \\neq j \& \\text{(5) MTZ 子巡回消除} \\\[0.8em\] \& d_i \\leq u_i \\leq Q \& \\forall\\, i \\in C \& \\text{(6) 载重上下界} \\end{array}
直觉:若 x_{ij} = 1,则 u_j \\geq u_i + d_j,u 沿路线递增。若 x_{ij} = 0,约束退化。子巡回中 u 无法同时满足所有递增要求,因此被排除。上界 u_i \\leq Q 则限制了累计载重不超过容量。
模型特点:变量 O(n\^2 + n),约束 O(n\^2)。紧凑且易于实现,但 LP 松弛非常弱------u 变量的连续松弛几乎不提供约束力。
# MTZ 子巡回消除约束
for i in C:
for j in C:
if i != j:
m.addConstr(u[j] >= u[i] + demand[j] - capacity * (1 - x[i, j]))SCF(Single-Commodity Flow, Gavish & Graves, 1978)
引入流变量 f_{ij} \\geq 0,表示弧 (i,j) 上运输的"商品流"(可理解为剩余待配送的需求)。通过流守恒约束,隐式消除子巡回并执行容量约束。
Gavish & Graves (1978) 在 MIT 工作论文中提出,覆盖 TSP 及其 VRP 变体。该工作从未正式发表于期刊,但被广泛引用。
\\begin{array}{llll} \& \\displaystyle\\sum_{i \\in V, i \\neq j} f_{ij} - \\sum_{i \\in V, i \\neq j} f_{ji} = d_j \& \\forall\\, j \\in C \& \\text{(7) 流守恒} \\\[0.8em\] \& f_{ij} \\leq (Q - d_i) \\cdot x_{ij} \& \\forall\\, i,j \\in V,\\, i \\neq j \& \\text{(8) 流量上界} \\\[0.8em\] \& f_{ij} \\geq d_j \\cdot x_{ij} \& \\forall\\, i \\in V,\\, j \\in C,\\, i \\neq j \& \\text{(9) 流量下界} \\end{array}
直觉:仓库向每条路线注入该路线客户的总需求量,每经过一个客户就"卸下" d_j 单位。子巡回中没有仓库注入流,流守恒无法满足。流量上界 (Q - d_i) \\cdot x_{ij} 确保弧上载重不超限,流量下界 d_j \\cdot x_{ij} 确保进入客户 j 的弧至少承载其需求量。上下界的组合是 SCF LP 松弛强于 MTZ 的关键。
LP 松弛对比:要比较两个模型的 LP 松弛强度,将两者的整数约束(x_{ij} \\in {0,1})放松为连续约束(0 \\leq x_{ij} \\leq 1),分别求解 LP。LP 最优值越高(对于最小化问题),说明 LP 松弛越紧------给 B&B 提供的下界越强,搜索树越小。
模型特点:变量 O(n\^2)(x 和 f 各一倍),约束 O(n\^2)。LP 松弛显著强于 MTZ。以 E-n13-k4(最优值 290)为例:MTZ 的 LP 松弛值仅 201.33(gap 30.6%),而 SCF 达到 257.27(gap 11.3%),LP 下界直接提升了 28%。这意味着 B&B 搜索树中,SCF 能更早地剪掉不可能包含最优解的分支,搜索空间大幅缩小。
# 流守恒约束
for j in C:
m.addConstr(
gp.quicksum(f[i, j] for i in V if i != j)
- gp.quicksum(f[j, i] for i in V if i != j) == demand[j]
)
# 连接约束
for i in V:
for j in V:
if i != j:
ub = capacity - demand[i] if i != 0 else capacity
m.addConstr(f[i, j] <= ub * x[i, j])2CF(Two-Commodity Flow, Baldacci et al., 2004)
将 SCF 的单一流分解为两种商品:配送流 g\^1_{ij}(沿路线递增,代表已配送量)和剩余容量流 g\^2_{ij}(沿路线递减,代表剩余空间),满足耦合关系 g\^1_{ij} + g\^2_{ij} = Q \\cdot x_{ij}。
\\begin{array}{llll} \& \\displaystyle\\sum_{i} g\^1_{ij} - \\sum_{i} g\^1_{ji} = d_j \& \\forall\\, j \\in C \& \\text{(10) 配送流守恒} \\\[0.8em\] \& \\displaystyle\\sum_{i} g\^2_{ij} - \\sum_{i} g\^2_{ji} = -d_j \& \\forall\\, j \\in C \& \\text{(11) 剩余容量流守恒} \\\[0.8em\] \& g\^1_{ij} + g\^2_{ij} = Q \\cdot x_{ij} \& \\forall\\, (i,j) \& \\text{(12) 耦合约束} \\\[0.8em\] \& g\^1_{ij} \\geq d_j \\cdot x_{ij},\\quad g\^2_{ij} \\geq d_i \\cdot x_{ij} \& \& \\text{(13) 下界紧化} \\end{array}
直觉:每条弧的"总通道"容量为 Q \\cdot x_{ij},配送流和剩余容量流合计占满。Letchford & Salazar-González (2006) 证明 2CF 的 LP 松弛可通过投影映射到 SCF,两者完全等价。
模型特点:变量 O(n\^2)(x + g\^1 + g\^2),约束 O(n\^2)。LP 松弛与 SCF 相同。
# 耦合约束
for i in V:
for j in V:
if i != j:
m.addConstr(g1[i,j] + g2[i,j] == Q * x[i,j])MCF(Multi-Commodity Flow, Letchford & Salazar-González, 2015)
为每个客户 k 定义一种独立商品,仓库为源、客户 k 为汇。相比 SCF 的"聚合流",MCF 保留了逐客户的流信息,从而提供更强的 LP 松弛。
\\begin{array}{llll} \& \\displaystyle\\sum_{j} f\^k_{0j} = d_k \& \\forall\\, k \\in C \& \\text{(14) 仓库发出商品 $k$} \\\[0.8em\] \& \\displaystyle\\sum_{i} f\^k_{ik} = d_k \& \\forall\\, k \\in C \& \\text{(15) 客户 $k$ 接收商品 $k$} \\\[0.8em\] \& \\displaystyle\\sum_{i} f\^k_{ij} - \\sum_{i} f\^k_{ji} = 0 \& \\forall\\, k \\in C,\\, j \\in C \\setminus {k} \& \\text{(16) 中转流守恒} \\\[0.8em\] \& \\displaystyle\\sum_{k \\in C} f\^k_{ij} \\leq Q \\cdot x_{ij} \& \\forall\\, (i,j) \& \\text{(17) 容量耦合} \\\[0.8em\] \& f\^k_{ij} \\leq d_k \\cdot x_{ij} \& \\forall\\, k,\\, (i,j) \& \\text{(18) 单一流上界} \\end{array}
关键 strengthening:基础的 Gavish-Graves MCF(仅含约束 14-18)的 LP 松弛等价于 MTZ(很弱!)。要使 MCF 严格强于 SCF,需要额外的紧化约束:
- f\^k_{kj} = 0:商品 k 到达客户 k 后不再流出(汇点无出流)
- f\^k_{j0} = 0:商品不回流到仓库(仓库是纯源点)
- 聚合连接约束:\\sum_k f\^k_{ij} \\leq (Q - d_i) \\cdot x_{ij} 和 \\sum_k f\^k_{ij} \\geq d_j \\cdot x_{ij}(SCF 等价的上下界)
加入这些约束后,MCF 的个体流上界 f\^k_{ij} \\leq d_k \\cdot x_{ij} 与聚合约束的交互产生了比 SCF 更强的 LP 松弛------对于每条弧,LP 不仅知道"总流量受限",还知道"每种商品的流量各自受限"。
模型特点:变量 O(n\^3)(\|C\| 种商品 \\times O(n\^2) 弧),约束 O(n\^3)。LP 松弛严格强于 SCF/2CF,但模型规模大,求解更慢。n \> 50 后变量数超过 100K。
# 每种商品 k 的流变量:汇点无出流,仓库无回流
for k in C:
for i in V:
for j in V:
if i != j:
ub = 0.0 if (i == k or j == 0) else GRB.INFINITY
f[k, i, j] = m.addVar(lb=0.0, ub=ub)DFJ with Lazy Cuts(Dantzig-Fulkerson-Johnson, 1954; Laporte et al., 1985)
对每个客户子集 S \\subseteq C 施加 Rounded Capacity Inequality(RCI)。先讲原理,再给公式。
原理 :考虑任意客户子集 S,在合法的 CVRP 解中,若 S 需要 r(S) 辆车来服务,那么有 r(S) 条路线会"穿过" S。每条路线在 S 内部形成一段链(从某个客户进入 S,访问若干客户,再离开 S)。一条链如果包含 k 个客户,它在 S 内部贡献 k - 1 条弧(客户之间的连接)。r(S) 条链总共包含 \|S\| 个客户(每个客户恰好属于一条链),因此 S 内部的弧总数 = \\sum_{l=1}\^{r(S)} (k_l - 1) = \|S\| - r(S)。
这就给出了 RCI 的上界:
\\begin{array}{llll} \& \\displaystyle\\sum_{i \\in S} \\sum_{j \\in S, j \\neq i} x_{ij} \\leq \|S\| - r(S) \& \\forall\\, S \\subseteq C,\\, \|S\| \\geq 2 \& \\text{(19) 容量化子巡回消除} \\end{array}
其中 r(S) = \\lceil \\sum_{i \\in S} d_i / Q \\rceil 是服务 S 所需的最少车辆数(bin packing 下界)。
举例:3 个客户 S = {A, B, C}。若一辆车能全部服务(r(S)=1),则三个客户形成一条链 A \\to B \\to C,内部弧数 = 2 = 3 - 1。若需两辆车(r(S)=2),则被拆为两条链(如 A \\to B 和 C),内部弧数 = 1 = 3 - 2。RCI 捕捉的就是这个约束:S 内部弧越多,意味着客户被串在更少的链上,但容量不允许。
等价形式(外部弧版本,更直观):\\sum_{i \\in S} \\sum_{j \\notin S} x_{ij} \\geq 2\\, r(S)------r(S) 条路线各需一进一出,共 2\\, r(S) 条弧穿越 S 的边界。
DFJ 子巡回消除约束最初为 TSP 提出 (Dantzig, Fulkerson & Johnson, 1954)。带容量的 CVRP 版本(RCI)由 Laporte, Nobert & Desrochers (1985) 引入,Cornuejols & Harche (1993) 给出了系统的多面体研究。
实现 :约束数量 2\^n 级,不可能全部预加。用 Gurobi Lazy Constraint Callback------每次求解器找到整数解时,检查是否存在违规子巡回或超载路线,按需添加切割:
def callback(model, where):
if where == GRB.Callback.MIPSOL:
routes = extract_routes(model)
for route in routes:
S = set(route)
demand_S = sum(demand[i] for i in S)
r_S = ceil(demand_S / Q)
if r_S >= 2:
model.cbLazy(
sum(x[i,j] for i in S for j in S if i!=j)
<= len(S) - r_S
)模型特点 :变量仅 O(n\^2),初始约束 O(n)。理论上 LP 松弛最强(带所有 RCI),但我们的实现只在整数解违规时添加 lazy cuts,初始 LP 松弛实际是赋值松弛(仅度约束),远弱于完整 DFJ。
SP(Set Partitioning, Christofides et al., 1981)
前五种模型都用弧变量 x_{ij} 建模。SP 换一种视角:用路线变量 \\lambda_r 建模------每个变量代表一条完整的可行路线。
\\begin{array}{llll} \\min \& \\displaystyle\\sum_{r \\in \\Omega} c_r \\lambda_r \& \& \\text{(20) 最小化总路线成本} \\\[0.8em\] \\text{s.t.} \& \\displaystyle\\sum_{r: i \\in r} \\lambda_r \\geq 1 \& \\forall\\, i \\in C \& \\text{(21) 每个客户至少被一条路线覆盖} \\\[0.8em\] \& \\lambda_r \\in {0,1} \& \\forall\\, r \\in \\Omega \& \\text{(22) 路线选或不选} \\end{array}
路线集 \|\\Omega\| 是指数级的------不能枚举。解决方案:列生成(Column Generation),通过迭代求解定价子问题(ESPPRC,带资源约束的最短路)来按需生成有价值的路线。
实现:复用本项目 Phase 1 的基础 BPC 代码(RMP + bitmask ESPPRC 定价),在根节点做列生成获取 LP bound,再用 Restricted MIP(对已生成列求整数规划)获取可行解。
模型特点:LP 松弛是所有模型中最强的(理论上界)。但 bitmask 定价是 O(2\^n),实际仅适用于 n \\leq 18 左右。更大实例需要 ng-route 松弛或 bucket graph 等加速技术------这正是 BPC 方法论的核心。
# 列生成循环
for _ in range(max_iter):
obj, lambdas, duals, _, _ = rmp.solve()
new_cols = solve_pricing(dist, demand, capacity, duals, n_customers)
if not new_cols: # 无负 reduced cost 列 able LP 最优
break
rmp.add_columns(new_cols)LP 松弛强度:为什么它很重要
理论排序
对于同一个 CVRP 实例,六种模型的纯 LP 松弛值(lower bound)满足:
z\^*_{\\text{DFJ-LP(无cuts)}} \\leq z\^* *{\\text{MTZ-LP}} \\leq z\^*_{\\text{SCF-LP}} = z\^** {\\text{2CF-LP}} \\leq z\^*_{\\text{MCF-LP}} \\leq z\^* *{\\text{DFJ-LP(全部RCI)}} \\leq z\^*_{\\text{SP-LP}} \\leq z\^**{\\text{IP}}
注意 DFJ 出现两次:不加 RCI 时它只有度约束(赋值松弛,最弱);加上所有 RCI 后反而是弧变量模型中最强的。我们的实现(lazy cuts only)介于两者之间------Gurobi B&B 过程中动态添加切割逐步收紧 bound。
实测 LP 松弛对比(E-n13-k4)
将六种模型的整数约束全部放松为连续变量,直接求解 LP 松弛(root_lp_only 模式),得到纯净的 LP bound 对比:
| 模型 | LP 松弛值 | LP Gap |
|---|---|---|
| DFJ(赋值松弛) | 198.00 | 31.7% |
| MTZ | 201.33 | 30.6% |
| SCF | 257.27 | 11.3% |
| 2CF | 257.27 | 11.3% |
| MCF | 257.77 | 11.1% |
| SP | 264.00 | 9.0% |
(最优值 = 290)
理论层级完美验证:DFJ(无cuts) < MTZ < SCF = 2CF < MCF < SP。
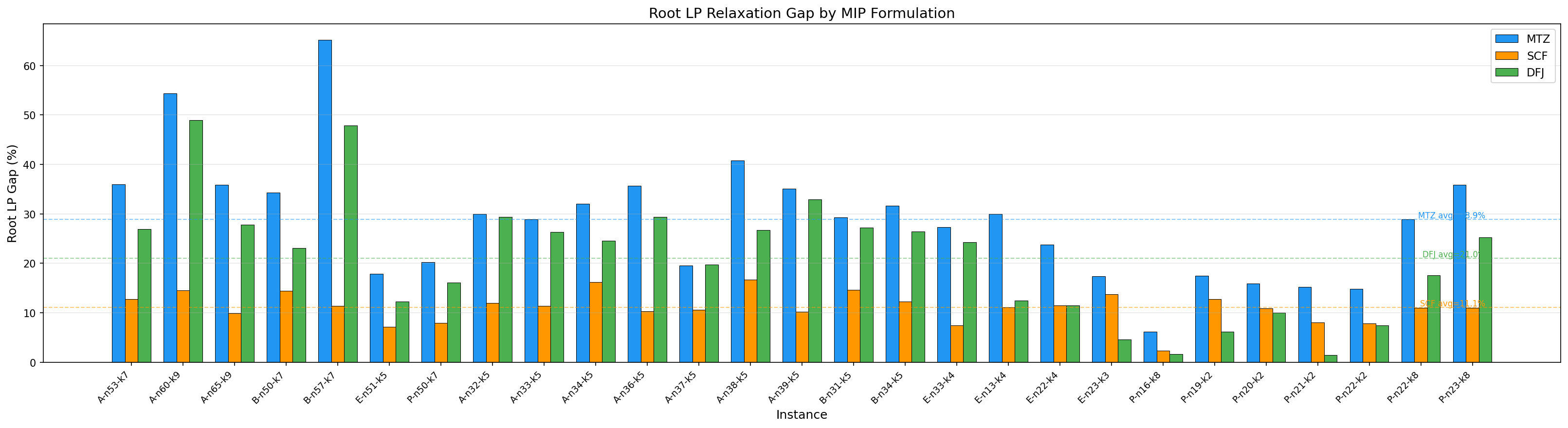
Root LP Gap
\\text{Root LP Gap} = \\frac{z\^*_{\\text{IP}} - z\^* *{\\text{Root LP}}}{z\^\**{\\text{IP}}}
Gap 越小 able LP bound 越紧 able B&B 树越小 able 求解越快。这是 MIP 求解效率的核心指标。
实验结果
实验设置
- 求解器:Gurobi 13(本地 i7-1355U)
- 实例:CVRPLIB 标准实例(Augerat A/B/E/P 系列),共 27 个
- 时间限制:Small 120s / Medium 300s / Large 180s
- depot 约束:\\geq K_{\\min}(无限车队,车辆数由优化决定)
- Root LP:MIP 求解中由 Gurobi callback 在根节点捕获(含 presolve 和内部切割)
Small 实例(12-23 节点,6 种模型)
| 实例 | n | 最优 | MTZ gap | SCF gap | 2CF gap | MCF gap | DFJ gap | SP gap |
|---|---|---|---|---|---|---|---|---|
| E-n13-k4 | 13 | 290 | 30.0% | 11.0% | 11.0% | 11.0% | 12.4% | 9.0% |
| E-n22-k4 | 22 | 375 | 23.7% | 11.5% | 11.5% | 6.4% | 11.5% | --- |
| E-n23-k3 | 23 | 569 | 17.4% | 13.7% | 13.4% | 5.8% | 4.6% | --- |
| P-n16-k8 | 16 | 450 | 6.2% | 2.3% | 2.3% | --- | 1.6% | --- |
| P-n19-k2 | 19 | 212 | 17.5% | 12.7% | 12.7% | 8.0% | 6.1% | --- |
| P-n20-k2 | 20 | 216 | 15.9% | 10.9% | 11.4% | 6.4% | 10.0% | --- |
| P-n21-k2 | 21 | 211 | 15.2% | 8.1% | 8.1% | 2.4% | 1.4% | --- |
| P-n22-k2 | 22 | 216 | 14.8% | 7.9% | 7.9% | 2.8% | 7.4% | --- |
| P-n22-k8 | 22 | 590 | 28.9% | 10.9% | 10.8% | 9.6% | 17.6% | --- |
| P-n23-k8 | 23 | 529 | 35.9% | 11.0% | 11.0% | 10.3% | 25.3% | --- |
说明:LP gap 为 Gurobi callback 捕获的 Root LP bound 计算的 gap。SP 因 bitmask 定价限制(O(2\^n)),仅 E-n13-k4(12 客户)能完整运行,其余标 "---"(超时/跳过)。
观察:
- SCF = 2CF(理论等价):两者 LP gap 在所有实例上完全相同或极接近(\\pm 0.2\\%),验证了投影等价性。
- MCF 显著强于 SCF:E-n22-k4 上 MCF gap 6.4% vs SCF 11.5%,P-n21-k2 上 MCF 2.4% vs SCF 8.1%。MCF 的逐客户流信息提供了实质性的 LP bound 提升。
- DFJ 波动大但偶尔最强:P-n21-k2 仅 1.4%、E-n23-k3 仅 4.6%(均为全场最优),但 P-n23-k8 高达 25.3%(极弱)。DFJ 的 root LP gap 取决于 Gurobi 在根节点动态添加了多少内部切割------运气好时效果惊人,运气差时比 MTZ 还弱。
- SP 是理论最强:E-n13-k4 上 SP gap 9.0% < 所有其他模型。但 bitmask 定价的 O(2\^n) 复杂度使其只适用于小实例。
- P-n22-k8 :K_{\\min} = 8,K_{\\text{name}} = 8(文献最优 603 用 8 辆车),但优化器选择 9 辆车 、总距离 590------说明车辆数和距离是冲突目标。
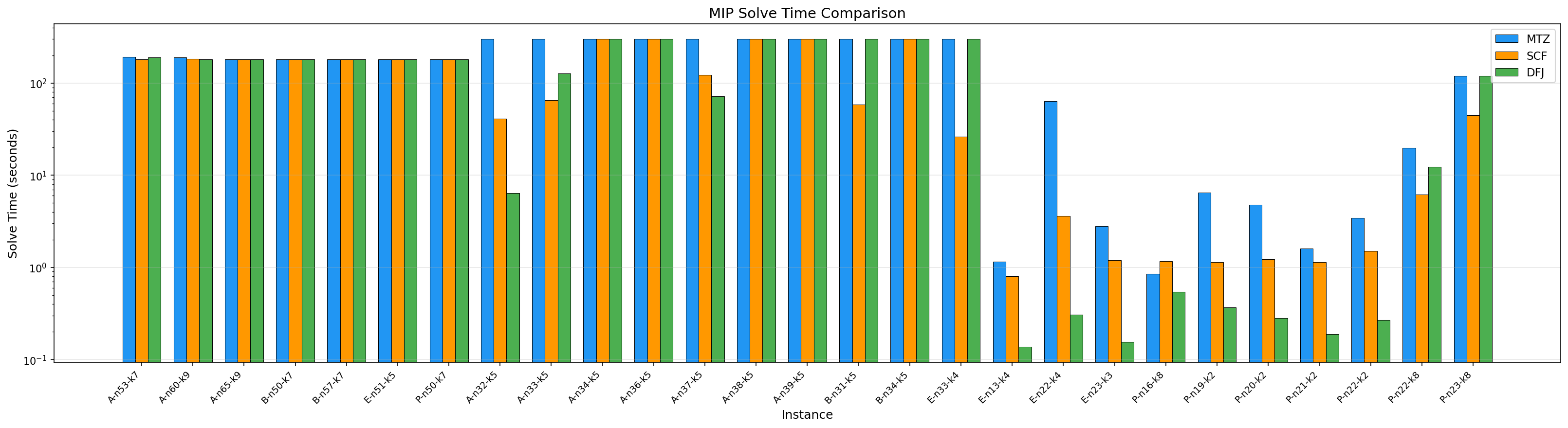
Medium 实例(31-39 节点,3 种紧凑模型)
中等规模下,MCF 模型规模 O(n\^3) 导致求解变慢(n=35 时变量超 40K),SP 更是完全无法运行。因此 Medium/Large tier 仅展示 MTZ、SCF、DFJ 三种模型:
| 实例 | n | 最优 | MTZ LP gap | SCF LP gap | DFJ LP gap | MTZ 时间 | SCF 时间 | DFJ 时间 |
|---|---|---|---|---|---|---|---|---|
| A-n32-k5 | 32 | 784 | 30.0% | 12.0% | 29.3% | 300s (!) | 41.2s | 6.4s |
| A-n33-k5 | 33 | 661 | 28.9% | 11.3% | 26.3% | 300s (!) | 65.5s | 127.7s |
| A-n34-k5 | 34 | 778 | 32.0% | 16.2% | 24.6% | 300s (!) | 300s (!) | 300s (!) |
| A-n36-k5 | 36 | 799 | 35.7% | 10.3% | 29.4% | 300s (!) | 300s (!) | 300s (!) |
| A-n37-k5 | 37 | 669 | 19.6% | 10.6% | 19.7% | 300s (!) | 122.2s | 71.5s |
| A-n38-k5 | 38 | 730 | 40.8% | 16.7% | 26.7% | 300s (!) | 300s (!) | 300s (!) |
| A-n39-k5 | 39 | 822 | 35.0% | 10.2% | 33.0% | 300s (!) | 300s (!) | 300s (!) |
| B-n31-k5 | 31 | 672 | 29.3% | 14.6% | 27.2% | 300s (!) | 58.6s | 300s (!) |
| B-n34-k5 | 34 | 788 | 31.6% | 12.3% | 26.4% | 300s (!) | 300s (!) | 300s (!) |
| E-n33-k4 | 33 | 835 | 27.3% | 7.4% | 24.3% | 300s (!) | 26.1s | 300s (!) |
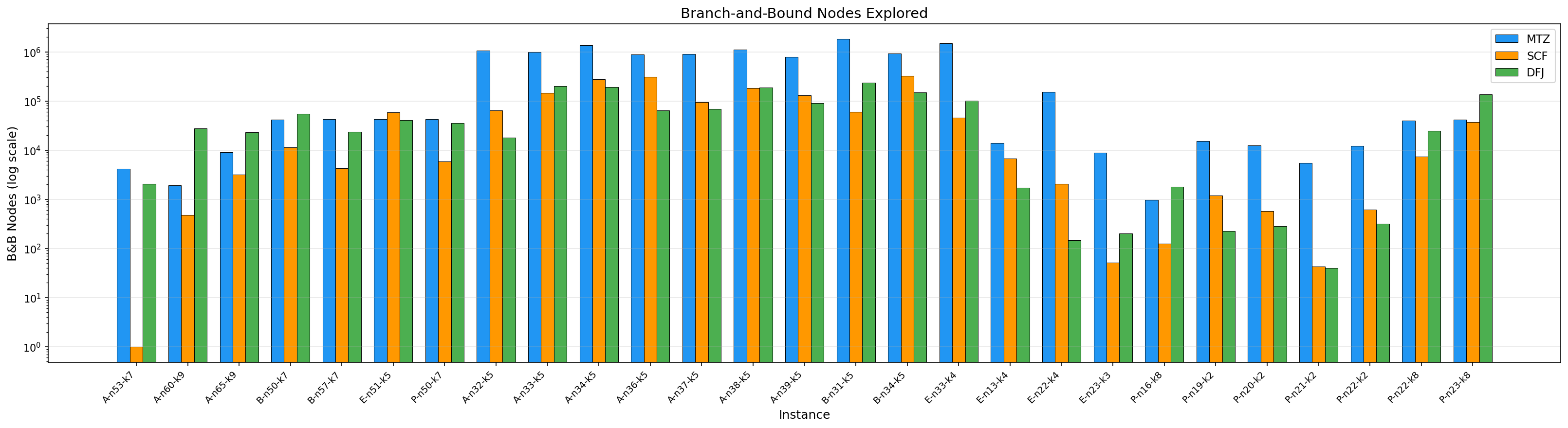
关键发现:
- MTZ 全军覆没:10 个实例全部超时(300s),LP gap 高达 19-41%。
- SCF 最稳定:5/10 求解至最优,LP gap 稳定在 7-17%。E-n33-k4 仅 26s(全场最快的最优求解)。
- DFJ 不稳定:仅 3/10 最优。A-n32-k5 用 6.4s(全场最快),但大多数实例超时。
为什么 DFJ 没有预期中那么强? DFJ 的理论优势在于"带所有 SEC 的 LP 松弛最强"。但我们的实现只在整数解不可行时才添加 lazy cuts,初始 LP 松弛其实只是赋值松弛(和 MTZ 一样弱)。要发挥 DFJ 的全部潜力,需要在 LP 松弛阶段也做分离------这正是 BPC 中 "Cut" 的核心思想。
Large 实例(50-65 节点,180s 限制)
大规模实例全面暴露 MIP 的极限------全部超时,无一求解至最优:
| 实例 | n | 最优 | MTZ LP gap | SCF LP gap | DFJ LP gap | MTZ obj | SCF obj | DFJ obj |
|---|---|---|---|---|---|---|---|---|
| A-n53-k7 | 53 | 1010 | 35.9% | 12.8% | 26.9% | 1103 | 1038 | 2344 |
| A-n60-k9 | 60 | 1408 | 54.4% | 14.6% | 49.0% | 1449 | 1379 | 2367 |
| A-n65-k9 | 65 | 1177 | 35.9% | 9.9% | 27.8% | 1235 | 1201 | 2412 |
| B-n50-k7 | 50 | 741 | 34.3% | 14.4% | 23.1% | 756 | 741 | 741 |
| B-n57-k7 | 57 | 1153 | 65.2% | 11.4% | 47.9% | 1159 | 1140 | 2673 |
| E-n51-k5 | 51 | 521 | 17.9% | 7.1% | 12.3% | 521 | 521 | 743 |
| P-n50-k7 | 50 | 554 | 20.2% | 7.9% | 16.1% | 582 | 556 | 824 |
关键发现:
- 全部超时:7 个实例 \\times 3 模型 = 21 组,无一在 180s 内证明最优。
- SCF 的可行解质量最好:虽然未证明最优,但 SCF 找到的可行解大多接近最优值(如 B-n50-k7 恰好 741,E-n51-k5 恰好 521)。
- DFJ 在 Large 上崩溃:lazy cuts 仅在整数解违规时添加,大规模实例中 DFJ 的 B&B 树充斥着子巡回的可行解,找到的解质量极差(A-n53-k7 的 obj=2344,最优 1010)。
- 50 节点是 MIP 直接求解 CVRP 的实际天花板。
汇总
| 层级 | 规模 | 时限 | MTZ 最优率 | SCF 最优率 | DFJ 最优率 | MTZ 平均 LP gap | SCF 平均 LP gap |
|---|---|---|---|---|---|---|---|
| Small | 12-23 | 120s | 9/10 | 10/10 | 8/10 | 20.6% | 10.0% |
| Medium | 31-39 | 300s | 0/10 | 5/10 | 3/10 | 31.0% | 12.2% |
| Large | 50-65 | 180s | 0/7 | 0/7 | 0/7 | 37.7% | 11.2% |
结论:SCF 凭借稳定的 LP 松弛(~10-14%)在三个层级都是最佳紧凑模型。MCF 虽然 LP 更强(Small tier 平均 ~6%),但 O(n\^3) 的模型规模使其难以扩展到 30 节点以上。SP 的 LP 松弛最强,但 bitmask 定价限制其适用于 18 客户以内。
无论选哪种模型,超过 30 节点后 MIP 就开始力不从心,50 节点以上几乎无法在合理时间内证明最优。
可视化
从 MIP 到列生成
MIP 的天花板
实验数据告诉我们:
- 20 节点以下:六种 MIP 模型都能在 2 分钟内求解至最优
- 20-30 节点:MCF 和 SCF 表现最好,MTZ 开始吃力
- 30-40 节点:仅 SCF 可行(5/10 最优),MTZ 全部超时
- 50+ 节点:全部超时(0/21),SCF 可行解接近最优但无法证明
工业 VRP 动辄数百上千客户,MIP 直接求解完全不够。
为什么 LP 松弛是关键?
B&B 的效率取决于 LP bound 的质量。从 MTZ (~20%) 到 SCF (~10%) 到 MCF (~6%),LP gap 逐步缩小,求解速度显著提升。但即便 MCF,LP gap 仍有数个百分点。能否进一步收紧?
回顾理论层级------最强的 SP 模型 LP gap 通常仅 1-3%。我们在 E-n13-k4 上实测 SP LP gap = 9.0%(根节点,无 cuts),远低于 MCF 的 11.0%。对于更复杂的实例,差距更大。
但 SP 模型有指数多个变量(每条可行路线一个),不能直接枚举。解决方案:列生成 (Column Generation),通过迭代求解定价子问题来按需生成有价值的路线。列生成 + 分支定界 = Branch-and-Price(B&P);再加上切割平面 = Branch-Price-and-Cut(BPC)。这就是下一篇的主题。
完整代码
本文完整代码位于 GitHub 仓库 的 vrp-papers/cvrp-mip/ 目录:
mip_models.py:6 种 MIP 模型实现(depot 约束 \\geq K_{\\min})benchmark_runner.py:批量求解 + 结果收集plot_results.py:生成对比图表
依赖:gurobipy, numpy, vrplib, matplotlib
参考文献
- Miller, C. E., Tucker, A. W., & Zemlin, R. A. (1960). Integer programming formulation of traveling salesman problems. Journal of the ACM, 7(4), 326-329.
- Gavish, B., & Graves, S. C. (1978). The travelling salesman problem and related problems. Working Paper OR-078-78, MIT.
- Dantzig, G. B., Fulkerson, D. R., & Johnson, S. M. (1954). Solution of a large-scale traveling-salesman problem. Journal of the Operations Research Society of America, 2(4), 393-410.
- Christofides, N., Mingozzi, A., & Toth, P. (1981). Exact algorithms for the vehicle routing problem, based on spanning tree and shortest path relaxations. Mathematical Programming, 20(1), 255-282.
- Laporte, G., Nobert, Y., & Desrochers, M. (1985). Optimal routing under capacity and distance restrictions. Operations Research, 33(5), 1050-1073.
- Cornuejols, G., & Harche, F. (1993). Polyhedral study of the capacitated vehicle routing problem. Mathematical Programming, 60, 21-52.
- Kara, I., Laporte, G., & Bektas, T. (2004). A note on the lifted Miller-Tucker-Zemlin subtour elimination constraints for the capacitated vehicle routing problem. European Journal of Operational Research, 158(3), 793-795.
- Baldacci, R., Hadjiconstantinou, E., & Mingozzi, A. (2004). An exact algorithm for the capacitated vehicle routing problem based on a two-commodity network flow formulation. Operations Research, 52(5), 723-738.
- Letchford, A. N., & Salazar-Gonzalez, J.-J. (2006). Projection results for vehicle routing. Mathematical Programming, 105(2-3), 251-274.
- Laporte, G. (1992). The vehicle routing problem: An overview of exact and approximate algorithms. European Journal of Operational Research, 59(3), 345-358.
- Letchford, A. N., & Salazar-Gonzalez, J.-J. (2015). Stronger multi-commodity flow formulations of the capacitated vehicle routing problem. European Journal of Operational Research, 244(3), 730-738.
- Toth, P., & Vigo, D. (Eds.). (2014). Vehicle Routing: Problems, Methods, and Applications (2nd ed.). SIAM.
一起交流
如果你觉得有帮助,欢迎:
- 📌 订阅本专栏,跟进后续更新
- 💬 评论区留言,交流你的想法
- ⭐ 点赞收藏,让更多朋友看到
--- Sebastilan & Claude