基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
当然,以下是一篇基于您提供的 RBF 神经网络车速预测模型代码的详细功能说明文章,旨在清晰描述其功能、流程与实现逻辑,同时避免泄露核心代码细节。
一、项目背景与目标
本项目旨在构建一个基于RBF(径向基函数)神经网络的时序预测模型,用于根据车辆历史车速信息,预测未来一段时间内的车速变化。该模型可应用于混合动力汽车的能量管理系统,通过提前预测车速,优化能量分配策略,提升整车能效。
二、模型整体架构
模型采用经典的"历史输入-未来输出"预测结构,通过滑动窗口方式构建训练与测试样本,利用RBF神经网络进行非线性映射学习,最终实现对未来多个时间步的车速预测。
主要流程包括:
- 数据准备与预处理
- 网络构建与训练
- 预测与结果反归一化
- 误差分析与可视化
三、功能模块详解
1. 数据准备模块
模型从两个数据文件中加载训练集(xunlian 或 xunlian_1)和测试集(ceshi),并据此确定训练与测试样本的数量。
基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
输入输出结构:
- 输入为连续多个历史时刻的车速序列;
- 输出为紧随其后的多个未来时刻的车速序列;
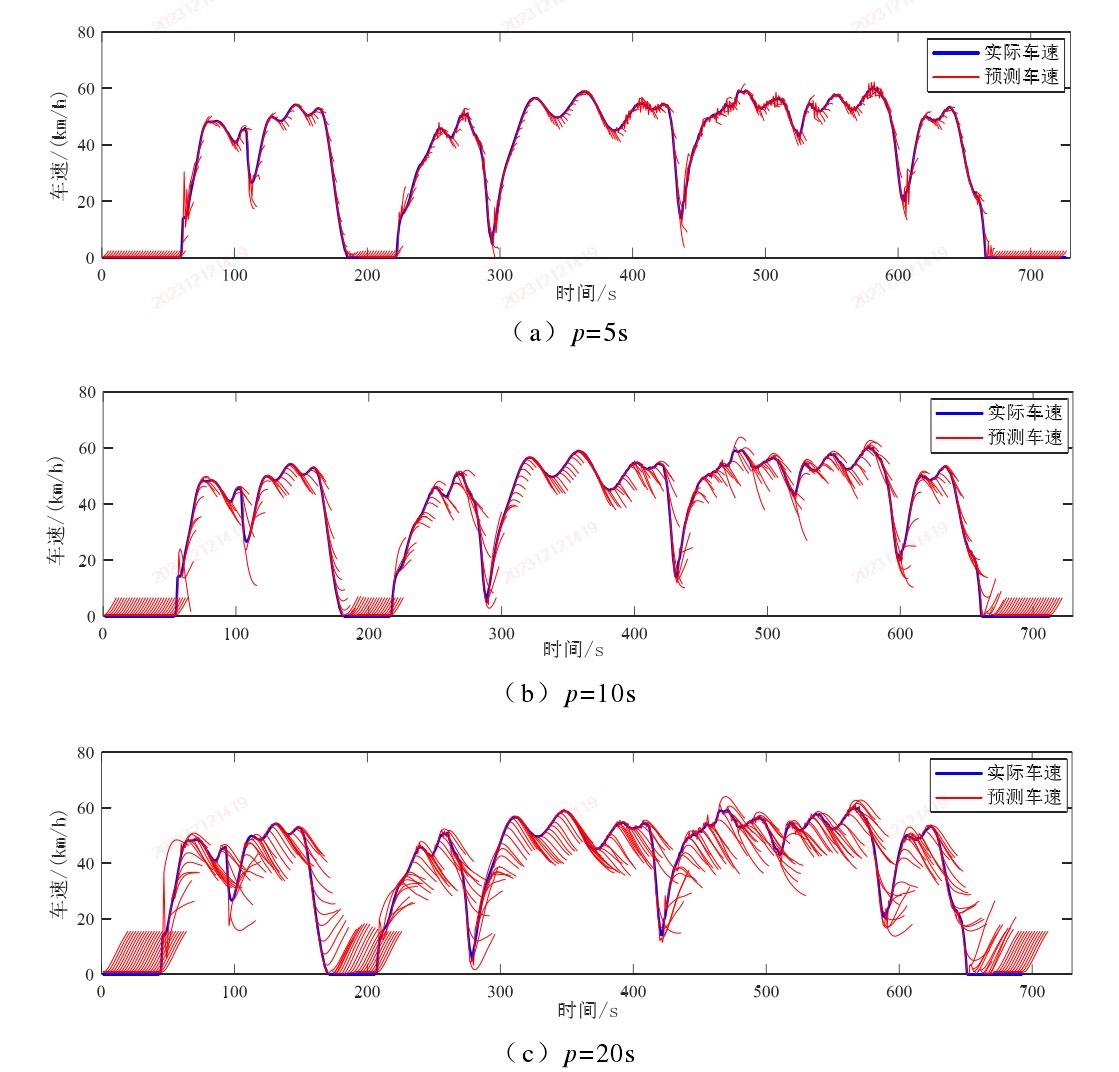
- 不同脚本中输入输出长度不同(如4-4、7-7、10-10等),体现多步预测的灵活性。
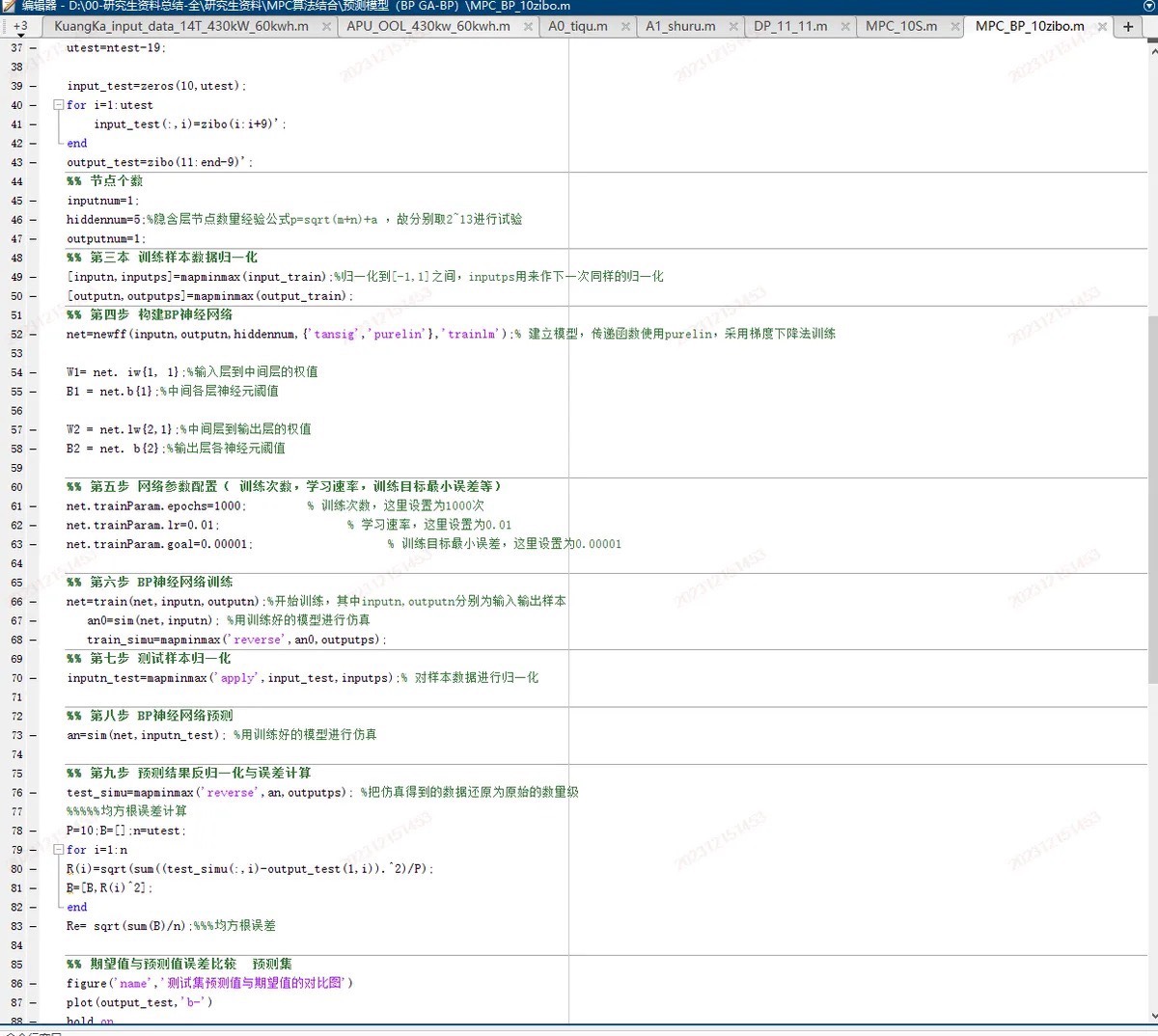
2. 数据归一化处理
使用 mapminmax 函数对输入和输出数据进行归一化,将其缩放到特定区间(如-1,1),以提升网络训练效率与稳定性。测试数据则使用训练数据的归一化参数进行处理,确保数据分布一致。
3. RBF神经网络构建
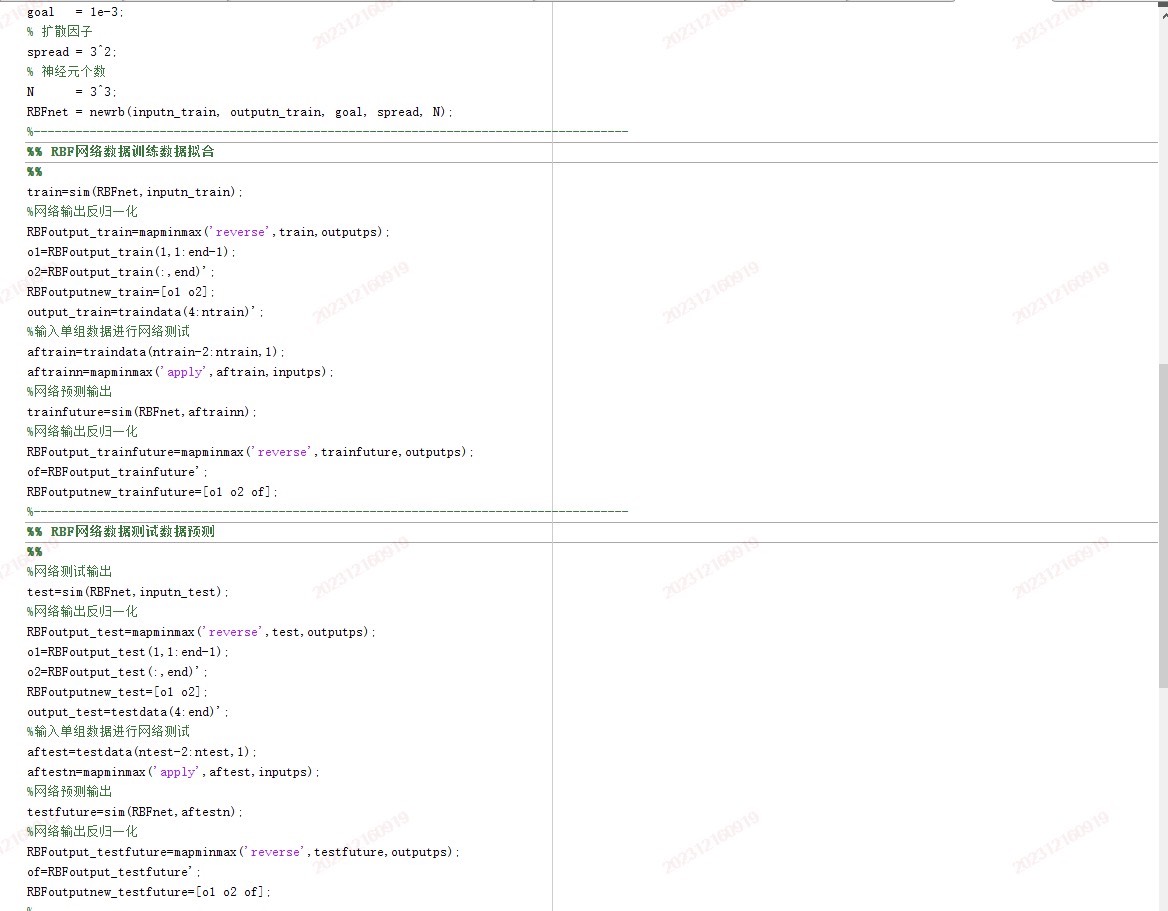
采用 newrb 函数创建RBF网络,关键参数包括:
goal:训练误差目标;spread:径向基函数的扩展速度;N:最大神经元数量。
网络通过逐步增加隐层神经元的方式逼近目标函数,适用于非线性时序预测任务。
4. 训练与预测流程
- 训练阶段:使用训练集输入输出对网络进行训练,拟合历史数据与未来数据之间的映射关系。
- 预测阶段:对测试集输入进行前向传播,得到未来车速的预测值。
- 反归一化:将网络输出还原为原始车速量纲,便于后续分析与展示。
5. 误差评估与可视化
模型计算以下评估指标:
- MAPE(平均绝对百分比误差)
- RMSE(均方根误差)
同时提供多张图表展示:
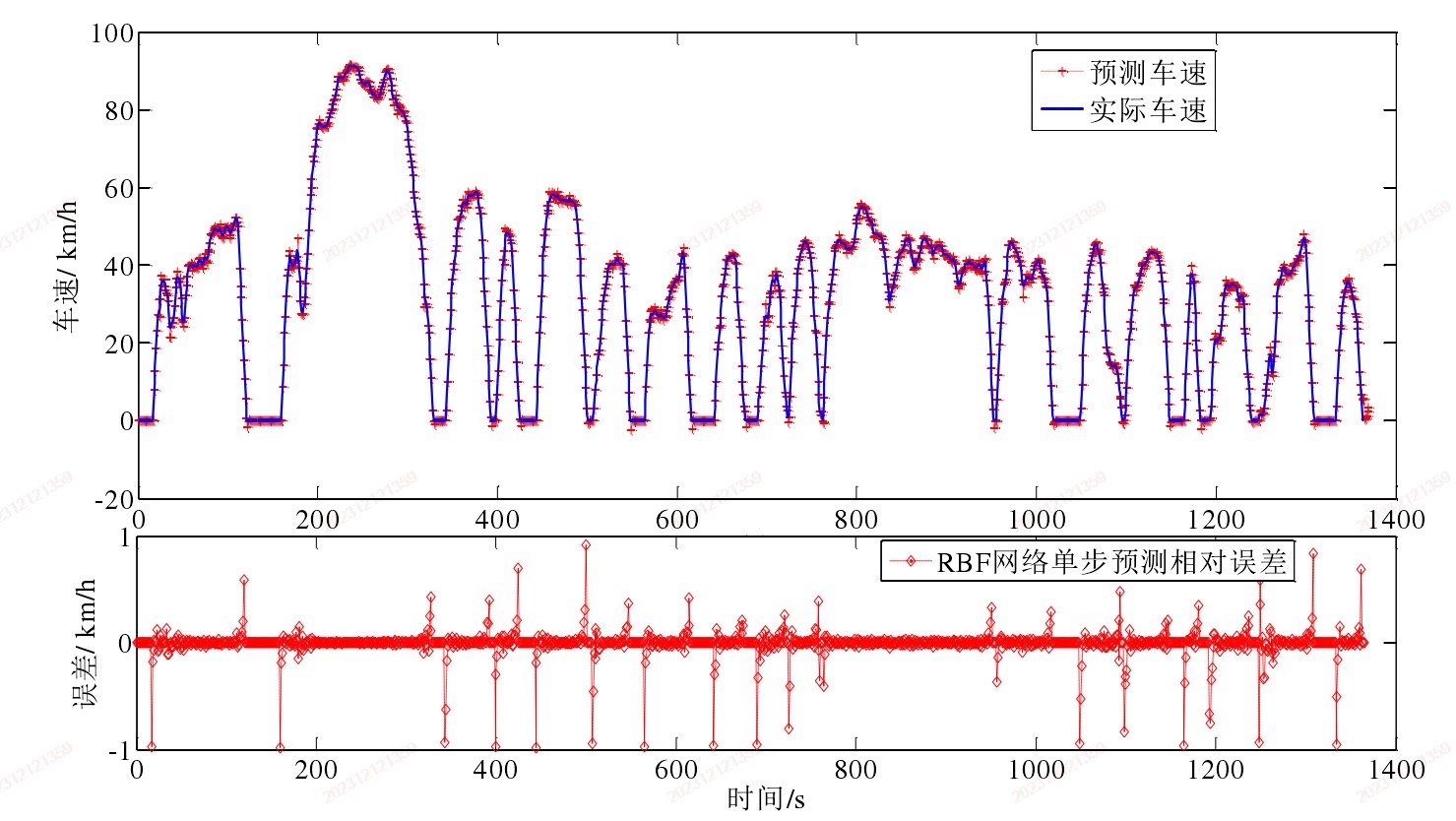
- 训练集与测试集的预测值与真实值对比;
- 预测误差随时间变化曲线;
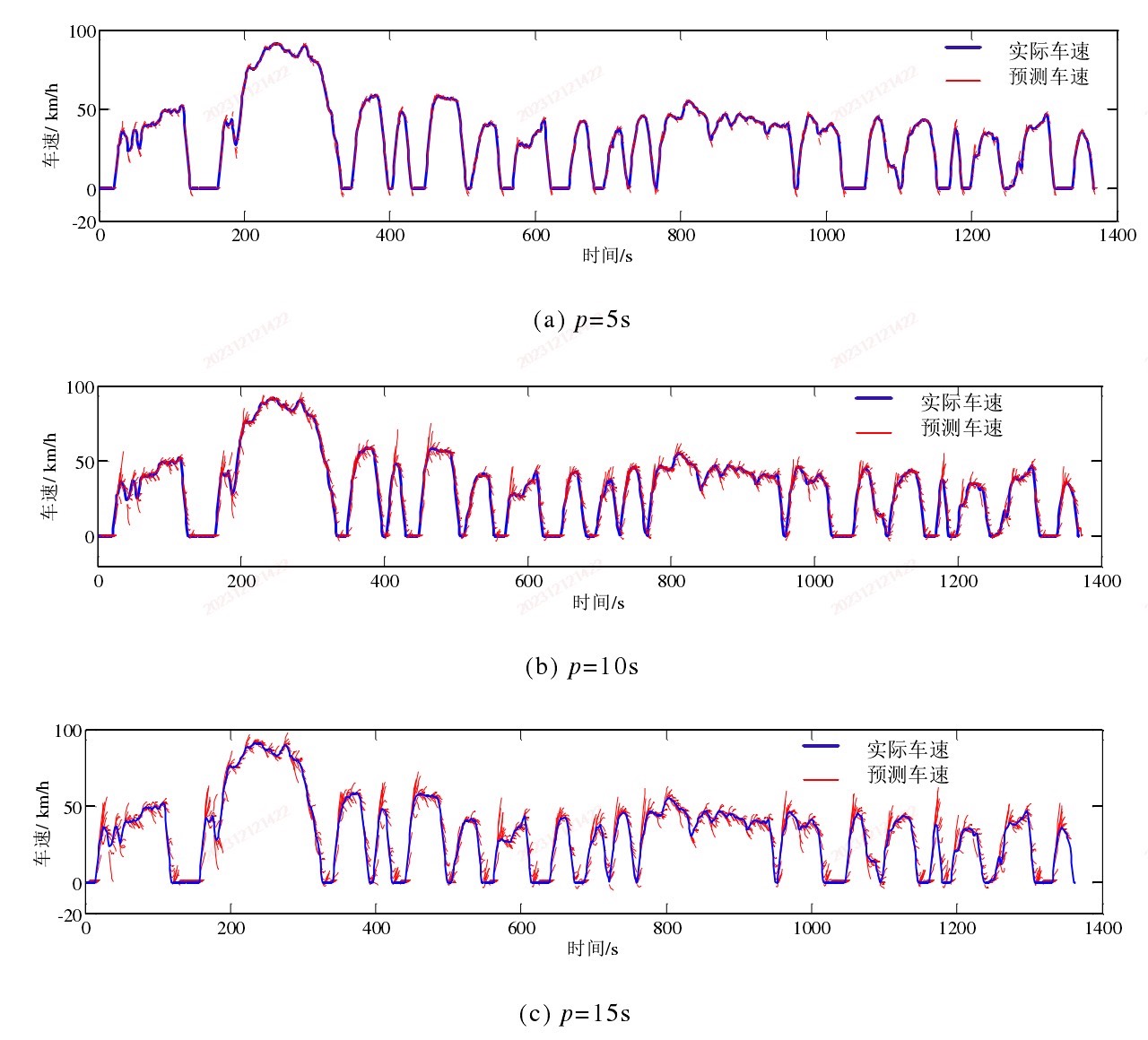
- 多步预测结果重叠展示图。
四、模型特点与优势
- 多步预测能力:可一次性预测未来多个时间点的车速,适用于需要前瞻控制的场景。
- 非线性建模能力强:RBF网络能有效捕捉车速序列中的复杂模式。
- 模块化设计:不同脚本对应不同预测步长,便于对比不同时间跨度下的预测效果。
- 可视化全面:提供误差分析与预测结果的多角度图形展示,便于模型调优与结果解释。
五、应用场景
本模型适用于:
- 混合动力汽车的能量管理策略优化;
- 电动汽车续航里程预测;
- 智能驾驶系统中的车速规划;
- 交通流分析与车速趋势预测。
六、总结
本项目实现了一个基于RBF神经网络的车速多步预测模型,具备良好的非线性拟合能力和预测精度。通过合理的模块划分与完整的评估体系,模型不仅适用于学术研究,也为工程应用提供了可靠的预测工具。未来可进一步结合实时数据流、在线学习机制或与其他预测模型(如LSTM、BP网络)融合,以提升预测精度与鲁棒性。
如果有需要修改或者补充的地方,可以随时告诉我。