①位带操作
(1)位带操作的好处
1、原子操作
2、代码简洁易读
3、执行效率高
4、减少内存占用
5、方便调试
6、可移植性(同一系列内)
位操作就是只对一个比特位的读和写,在51单片机种用sbit来实现,STM32中则用访问位带别名区来实现。位带别名区把SRAM区和外设区的最低1MB的空间的每一位膨胀成一个32位的字(因为系统总线是32位,膨胀成4个字节访问效率最高),通过访问位带别名区的字来访问位带区某个比特位。
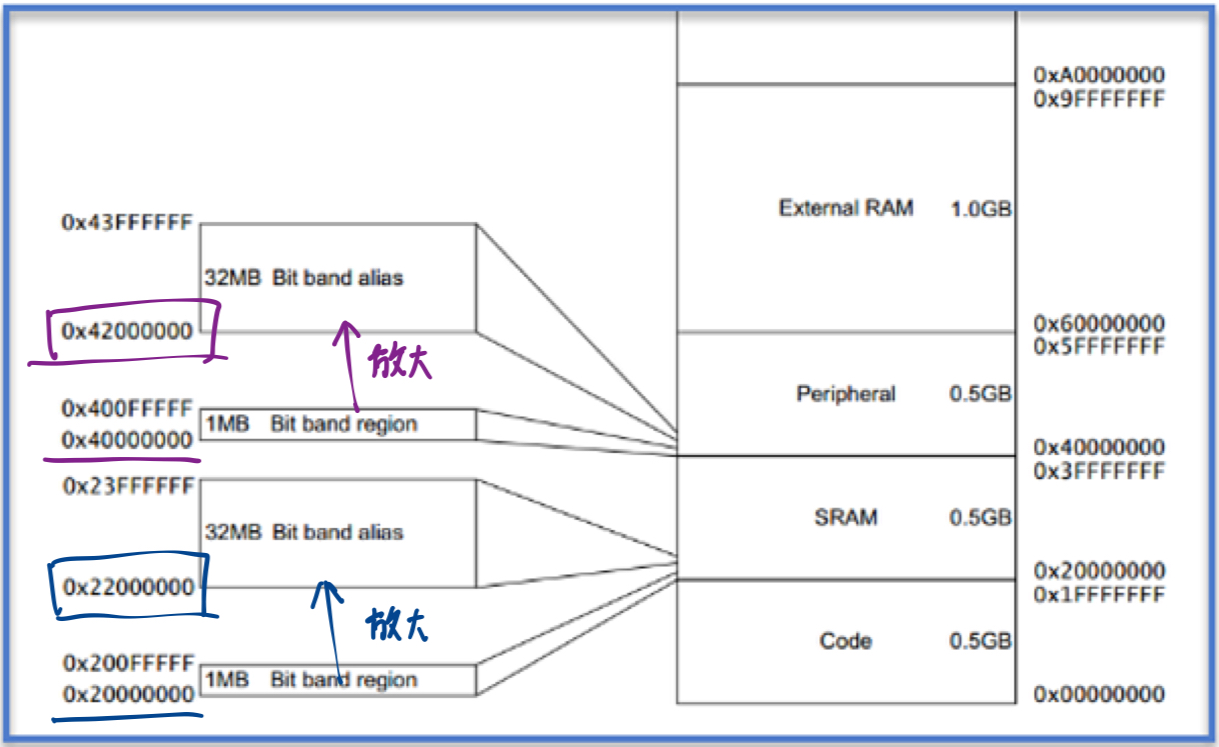
(2)位带区与位带别名区的地址转换
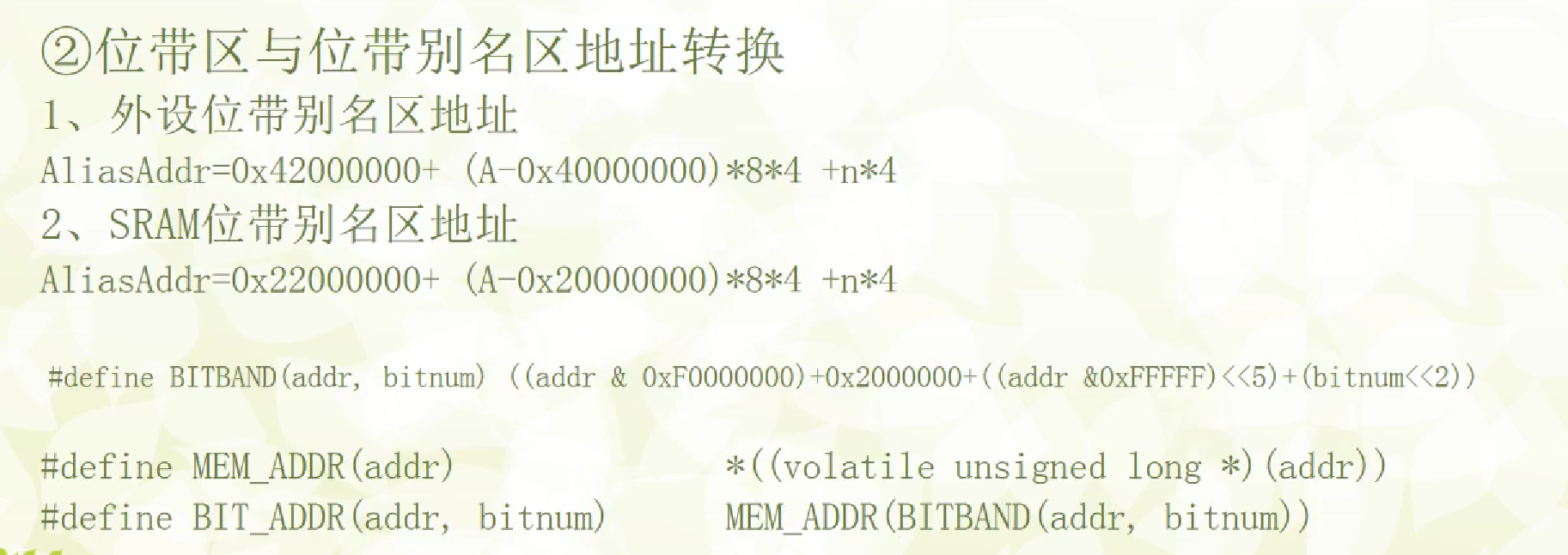
解析:A-0x40000000:原来偏移的字节
(A-0x40000000)*4:膨胀后偏移的字节
(A-0x40000000)*4*8:膨胀后偏移的位(1字节=8位)
n*4:膨胀后的某位号
addr & 0xF0000000:区别是外设还是SRAM,这两个的区别就是最高位的4和2
+0x2000000:膨胀后的基地址上移了这么多位
addr & 0xFFFFF:相当于上面的"A-0x40000000",因为没有膨胀的时候最高地址0x200FFFFF,膨胀之后的最高地址0x23FFFFFF对比,低5位有效
<<5:相当于*8*4,<<5左移五位换成十进制就是2^5,即32
<<2:相当于*4。
(3)代码
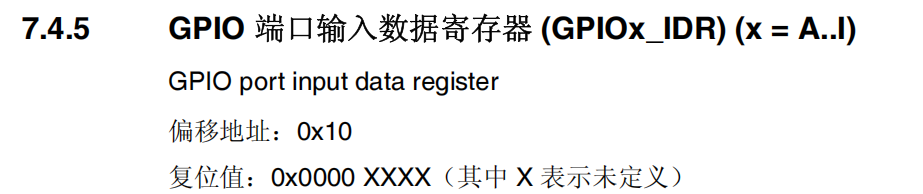
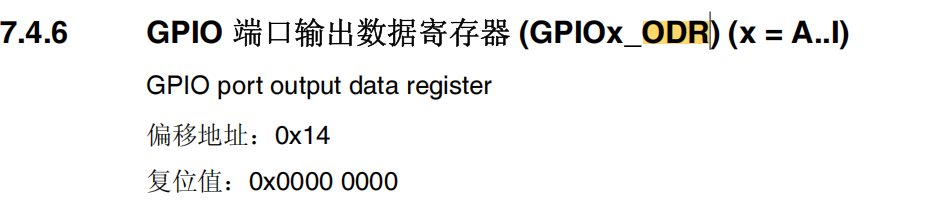
根据手册查看偏移地址,写寄存器的映射以及位操作
cs
#ifndef _system_H
#define _system_H
#include "stm32f4xx.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口
//确保n的值小于16
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#endif②按键控制
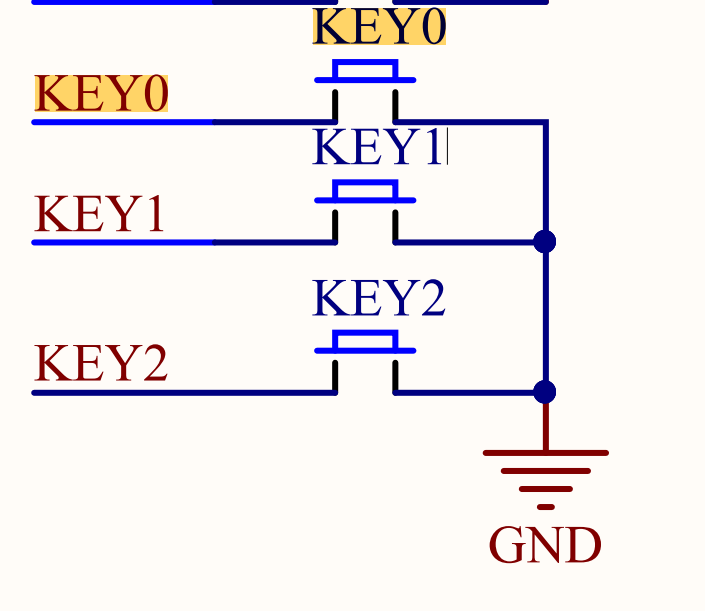

由原理图可知,要将按键设置成上拉模式,这样有明确高低电平,当按键没有按下的时候引脚为低电平,按下的时候引脚为高电平。
代码
cs
#include "key.h"
#include "SysTick.h"
void KEY_Init()
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_3;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE,&GPIO_InitStruct);
}
u8 KEY_Scan()
{
static u8 key0_static = 0;
static u8 key1_static = 0;
u8 ret = NO_PRESS;
if(!key0_static)
{
if(!KEY0)
key0_static = 1;
}
else
{
if(KEY0 && key0_static)
{
ret = KEY0_PRESS;
key0_static = 0;
}
}
if(!key1_static)
{
if(!KEY1)
key1_static = 1;
}
else
{
if(KEY1 && key1_static)
{
ret = KEY1_PRESS;
key1_static = 0;
}
}
return ret;
}
cs
#ifndef _key_H
#define _key_H
#include "system.h"
#define KEY0_PIN GPIO_Pin_4 //定义KEY0管脚
#define KEY1_PIN GPIO_Pin_3 //定义KEY1管脚
#define KEY_PORT GPIOE //定义端口
//使用位操作定义
#define KEY0 PEin(4)
#define KEY1 PEin(3)
//定义各个按键值
#define KEY0_PRESS 0
#define KEY1_PRESS 1
#define NO_PRESS 3
void KEY_Init(void);
u8 KEY_Scan(void);
#endif按键按下后检查释放
③按键控制灯亮灭
代码
cs
int main()
{
SysTick_Init(168);
LED_Init();
KEY_Init();
while(1)
{
u8 key = KEY_Scan();
if(key == KEY0_PRESS)
LED1 = !LED1;
else if(key == KEY1_PRESS)
LED2 = !LED2;
}
}每轮读取一次按键状态,当检测到KEY0按键按下,LED1取反亮灭;当检测到KEY1按键按下,LED2取反亮灭。