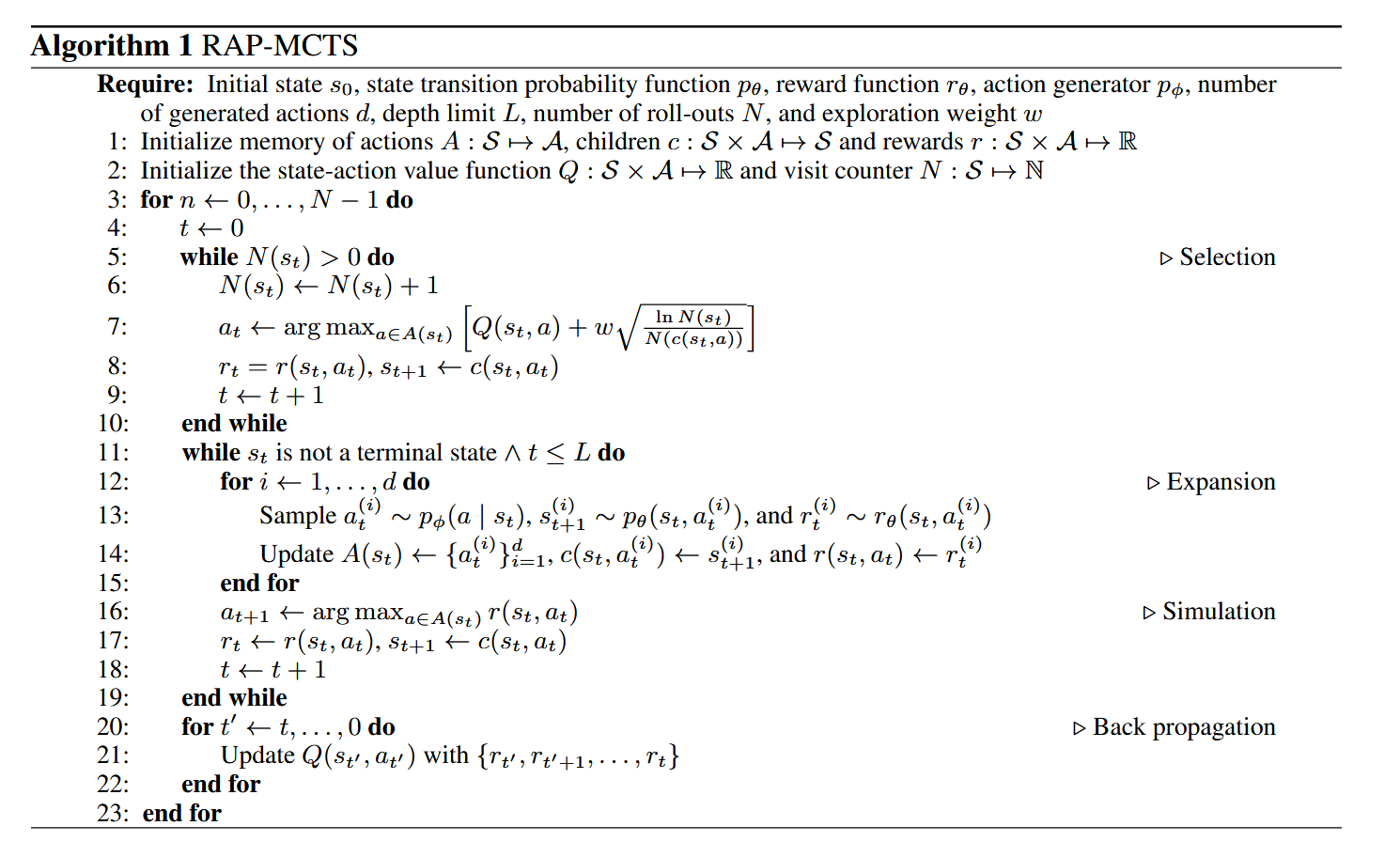
基于论文第3.3节、附录A及算法1,以下是对RAP-MCTS伪代码的逐行技术解析与系统性分析:
一、算法框架与输入参数
1.1 输入参数体系(基于第3.3节与算法1)
| 参数 | 数学符号 | 功能定义 | 工程对应 |
|---|---|---|---|
| 初始状态 | s0s_0s0 | 推理起点(如Blocksworld初始积木配置) | 问题输入 |
| 状态转移 | pθp_\thetapθ | 世界模型(LLM改造) | p(st+1∣st,at,c′)p(s_{t+1}|s_t, a_t, c')p(st+1∣st,at,c′) |
| 奖励函数 | rθr_\thetarθ | 四维度评估(第3.2节) | r(st,at)r(s_t, a_t)r(st,at) |
| 动作生成器 | pφp_\varphipφ | 智能体LLM策略 | p(a∣st,c)p(a|s_t, c)p(a∣st,c) |
| 分支因子 | ddd | 每节点扩展的动作数 | 控制树宽度 |
| 深度限制 | LLL | 最大推理步数 | 防止无限搜索 |
| 迭代次数 | NNN | MCTS模拟次数 | 计算预算 |
| 探索权重 | www | UCT公式中平衡探索/利用 | ccc in UCT1 |
1.2 初始化数据结构(第1-2行)
python
A: S → A(s) # 动作记忆:记录每个状态s的候选动作集合
c: S×A → S # 子节点映射:状态-动作对 → 下一状态
r: S×A → R # 奖励映射:状态-动作对的即时奖励
Q: S×A → R # 动作价值函数:长期累积回报估计
N: S → N # 访问计数器:状态被访问次数关键设计:与标准MCTS不同,RAP显式维护动作记忆 A(s)A(s)A(s) 和子节点映射 c(s,a)c(s,a)c(s,a),这是因为LLM动作空间巨大且随机,无法像围棋那样枚举所有合法动作(附录A:"对于开放域问题,无法枚举所有可能行动")。
二、主循环:四阶段详解(第3-23行)
2.1 选择阶段(Selection,第5-10行)
python
while N(s_t) > 0: # 树策略:沿已访问节点下行
N(s_t) ← N(s_t) + 1 # 更新访问计数
a_t ← argmax[UCT公式] # 公式(1)实现
r_t = r(s_t, a_t) # 获取即时奖励(用于后续反向传播)
s_{t+1} ← c(s_t, a_t) # 通过子节点映射转移状态
t ← t + 1UCT公式实现(第7行对应公式1):
at=argmaxa∈A(st)Q(st,a)+wlnN(st)N(c(st,a))a_t = \arg\max_{a \in A(s_t)} \left Q(s_t, a) + w\\sqrt{\\frac{\\ln N(s_t)}{N(c(s_t, a))}} \\rightat=arga∈A(st)maxQ(st,a)+wN(c(st,a))lnN(st)
工程细节(附录A补充):
- 未探索动作处理:若存在 a∈A(st)a \in A(s_t)a∈A(st) 满足 N(c(st,a))=0N(c(s_t,a))=0N(c(st,a))=0(即未访问),算法使用轻量级局部奖励(如仅 r3r_3r3 自我评估)估算初始Q值,而非标准UCT的无穷大探索 bonus
- 终止检查:若 sts_tst 为终止状态(满足目标或失败),跳过扩展直接进入反向传播
2.2 扩展阶段(Expansion,第11-15行)
python
while $s_t$ 非终止状态 ∧ t ≤ L: # 限制搜索深度
for i ← 1 to d: # 生成d个候选动作
$a^{(i)}_t ~ p_φ(a|s_t)$ # 从智能体LLM采样动作
$s^{(i)}_{t+1} ~ p_θ(s_t, a^{(i)}_t)$ # 世界模型预测下一状态
$r^{(i)}_t ~ r_θ(s_t, a^{(i)}_t)$ # 计算四维度奖励
# 更新记忆结构
$A(s_t) ← {a^{(i)}_t}_{i=1}^d$
$c(s_t, a^{(i)}_t) ← s^{(i)}_{t+1}$
$r(s_t, a_t) ← r^{(i)}_t$与标准MCTS的关键差异:
- 动作空间截断:标准MCTS通常枚举所有合法动作(如围棋19×19=361个落子点),而RAP通过采样固定数量d(如d=5)来应对开放域的无限动作空间(附录A:"通过从LLM中采样固定数量的潜在行动来缩减行动空间")
- 世界模型调用:每次扩展需调用LLM两次(一次生成动作,一次预测状态),计算成本显著高于传统MCTS的确定性状态转移
2.3 模拟阶段(Simulation/Rollout,第16-18行)
python
a_{t+1} ← argmax_{a ∈ A(s_t)} r(s_t, a_t) # 选择局部最优动作
r_t ← r(s_t, a_t) # 记录奖励
s_{t+1} ← c(s_t, a_t) # 状态转移
t ← t + 1策略选择(第3.3节):
- 默认策略(Default Policy):采用贪婪策略(greedy rollout),即选择当前奖励最高的动作,而非随机策略
- 轻量级奖励:为效率考虑,模拟阶段使用简化版奖励函数(如仅使用 r1r_1r1 和 r3r_3r3,舍弃需多次采样的 r2r_2r2 状态置信度)
深度限制:模拟持续直至到达终止状态或深度 LLL,形成完整轨迹 (s0,a0,r0,...,sT)(s_0, a_0, r_0, ..., s_T)(s0,a0,r0,...,sT)
2.4 反向传播(Backpropagation,第20-22行)
python
for t' ← t downto 0: # 从叶节点回溯至根节点
根据 {r_{t'}, r_{t'+1}, ..., r_t} 更新 Q(s_{t'}, a_{t'})Q值更新规则(第3.3节):
- 累积回报计算:Rt′=∑k=t′tγk−t′rkR_{t'} = \sum_{k=t'}^{t} \gamma^{k-t'} r_kRt′=∑k=t′tγk−t′rk(论文未明确折扣因子 γ\gammaγ,但通常取1或0.9)
- 增量平均更新:
Q(st′,at′)←Q(st′,at′)+Rt′−Q(st′,at′)N(st′,at′)Q(s_{t'}, a_{t'}) \leftarrow Q(s_{t'}, a_{t'}) + \frac{R_{t'} - Q(s_{t'}, a_{t'})}{N(s_{t'}, a_{t'})}Q(st′,at′)←Q(st′,at′)+N(st′,at′)Rt′−Q(st′,at′)
关键机制:即时奖励 rtr_trt(包含四维度信号)通过反向传播影响祖先节点的Q值,使得早期错误动作(低 r3r_3r3 自我评估)在后续迭代中被UCT公式惩罚,实现错误回溯(backtracking of errors)。
三、算法终止与输出(第23行后)
算法终止后,从构建的树中选择最终轨迹(第3.3节):
- 最大Q值路径:从根节点开始,迭代选择 argmaxaQ(s,a)\arg\max_a Q(s,a)argmaxaQ(s,a) 直至叶节点
- 最高奖励路径:选择在所有迭代中获得最高累积奖励 RRR 的路径
- 最多访问路径:选择被访问次数最多的叶节点对应路径(最稳健策略)
RAP聚合(第3.4节):对于数学推理等仅需最终答案的任务,可运行多次MCTS(不同随机种子),对多条轨迹的答案进行多数投票(majority voting)。
四、与标准MCTS的系统性差异(基于附录A)
| 特征 | 标准MCTS(如AlphaGo) | RAP-MCTS | 工程影响 |
|---|---|---|---|
| 动作空间 | 有限、可枚举 | 无限、开放域,采样d个动作 | 需设计好的动作生成器 pφp_\varphipφ |
| 状态转移 | 确定性或学习得到的模型 | LLM作为世界模型 pθp_\thetapθ | 转移概率非平稳,依赖提示词 |
| 奖励结构 | 通常仅终局奖励 | 每步四维度奖励 r1r_1r1-r4r_4r4 | 可中间剪枝,但计算成本高 |
| 模拟策略 | 随机或基于策略网络 | 贪婪选择(基于轻量级奖励) | 减少rollout方差,但可能错过好路径 |
| 探索机制 | 标准UCT | UCT + 未探索节点局部奖励估计 | 适应有限迭代预算(N=10/20) |
五、计算复杂度分析
单次迭代成本:
- 选择阶段:O(d⋅L)O(d \cdot L)O(d⋅L) 次查表(假设树已部分构建)
- 扩展阶段:2d2d2d 次LLM调用(动作生成 + 状态预测)+ ddd 次奖励计算(r2r_2r2 需多次采样,成本最高)
- 模拟阶段:O(L)O(L)O(L) 次轻量级奖励计算
- 反向传播:O(L)O(L)O(L) 次Q值更新
总成本:O(N⋅d⋅(CLLM+Creward))O(N \cdot d \cdot (C_{\text{LLM}} + C_{\text{reward}}))O(N⋅d⋅(CLLM+Creward)),其中 CLLMC_{\text{LLM}}CLLM 为单次LLM推理成本。第4节实验使用 N=10N=10N=10 或 202020,ddd 通常为3-5,这使得RAP比CoT慢5-100倍(ToT论文附录B.3类似分析)。
六、算法局限性(基于第6节)
- 世界模型误差累积:若 pθp_\thetapθ 在第 ttt 步预测错误状态,后续所有 QQQ 值估计将基于错误前提(第6节:"未来工作可通过微调改进世界模型")
- 奖励校准敏感性:若 r3r_3r3(自我评估)过度自信,算法可能过早剪枝正确路径
- 深度限制 LLL 的设定:对于需要长程推理的问题(如>6步的Blocksworld),固定 LLL 可能导致无法找到解(第5.1节补充实验显示6步以上成功率下降)