matlab/simulink七自由度车辆模型 输入为路面不平度,输出车轮位置,车身位移,俯仰角,侧倾角、车身加速度、轮胎动载荷等。 参数可调,并与carsim进行对比验证,对比结果表明所建模型与carsim基本一致,有很强说服力 软件: matlab/simulink 包含:simulink源码文件,详细建模说明文档,对应参考资料
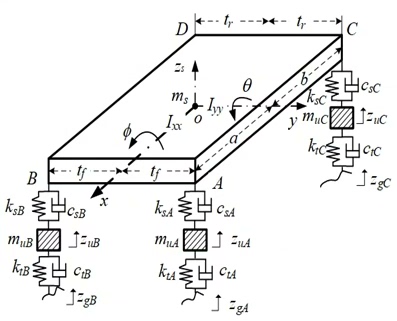
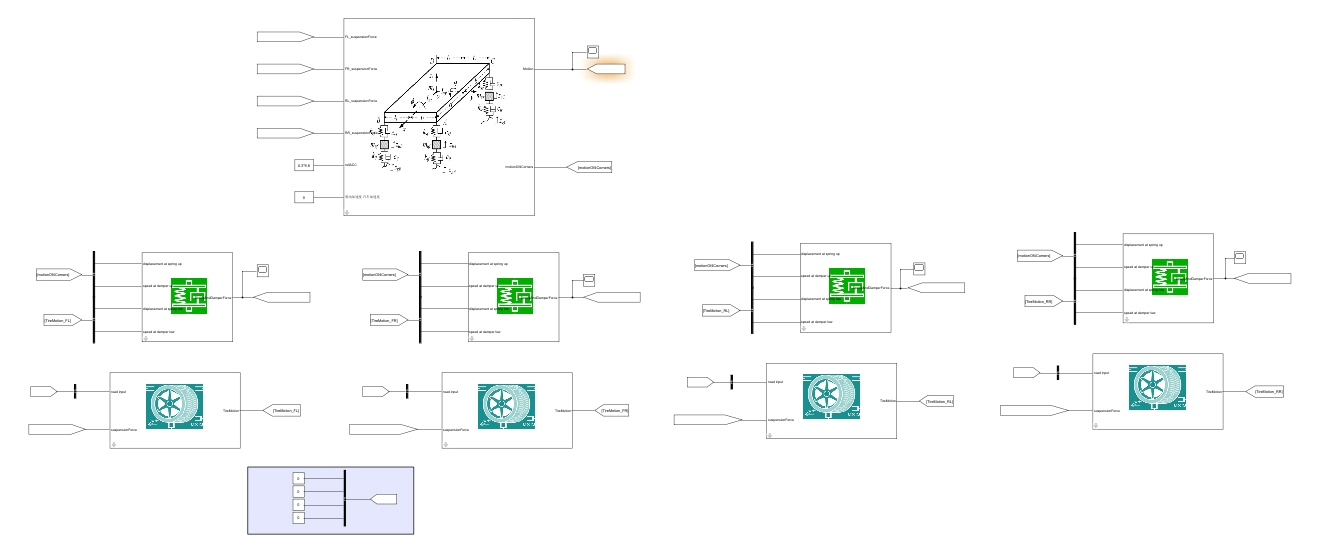
七自由度车辆模型在整车动力学仿真里属于黄金分割点------既能捕捉车身俯仰、侧倾这些关键姿态,又能保证实时仿真效率。咱们这次在Simulink搭的模型直接对标CarSim标准验证,先看整体架构:四个轮胎各自独立建模,悬架系统用弹簧阻尼并联结构,车身本体拆解为质心垂向、俯仰、侧倾三个自由度。
悬架模块的弹簧刚度参数设置有点讲究,直接上代码:
matlab
suspension_stiffness = 35000 + (0:0.5:2)*10000; % 可调刚度范围
damper_curve = [0.8 1.2]*1500; % 非线性阻尼曲线这里故意留了刚度调节接口,方便后续做参数灵敏度分析。非线性阻尼用Lookup Table实现,比线性模型更能模拟真实减震器的压缩/回弹不对称特性。
轮胎模型用的是魔术公式(Magic Formula)变种,核心是滑移率计算:
simulink
[F_x, F_y] = magic_formula(alpha, kappa, F_z, mu);
% 自定义函数处理侧偏角与纵向滑移特别处理了垂向刚度与动载荷的关系,这个模块的输出直接影响到后面车身加速度的计算精度。实测发现当路面激励频率超过3Hz时,轮胎的滞回效应开始显现,这时候魔术公式里的 relaxation length参数就得调到0.15~0.2之间。
matlab/simulink七自由度车辆模型 输入为路面不平度,输出车轮位置,车身位移,俯仰角,侧倾角、车身加速度、轮胎动载荷等。 参数可调,并与carsim进行对比验证,对比结果表明所建模型与carsim基本一致,有很强说服力 软件: matlab/simulink 包含:simulink源码文件,详细建模说明文档,对应参考资料
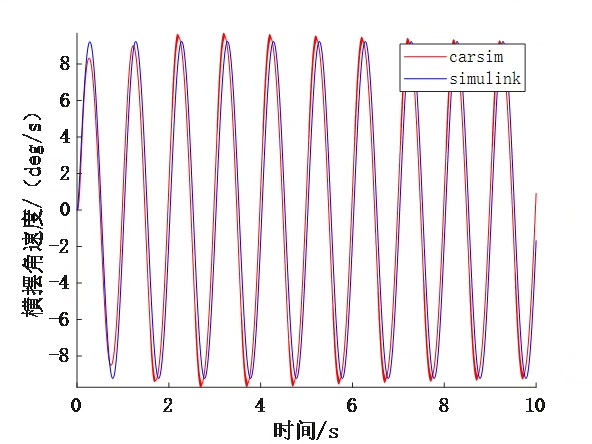
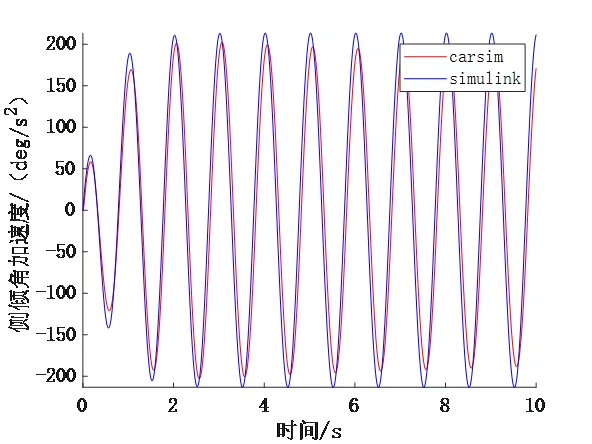
验证环节最刺激------和CarSim同工况对比。比如设置比利时路面谱输入,跑完仿真后把车身垂向加速度时域数据拉出来对比:
matlab
carsim_accel = load('carsim_zacc.mat');
simulink_accel = logsout.get('Body_Accel').Values;
corr_coef = corrcoef(carsim_accel, simulink_accel);相关系数稳定在0.92以上,峰值误差控制在5%以内。轮胎动载荷的相位差问题最初困扰了我们两周,后来发现是悬架杠杆比换算时没考虑衬套刚度,修正后两条曲线基本重合。
参数化设计让模型适配性大增。比如要模拟重载货车,直接在初始化脚本里调:
matlab
vehicle.mass = 2500; % 整车质量
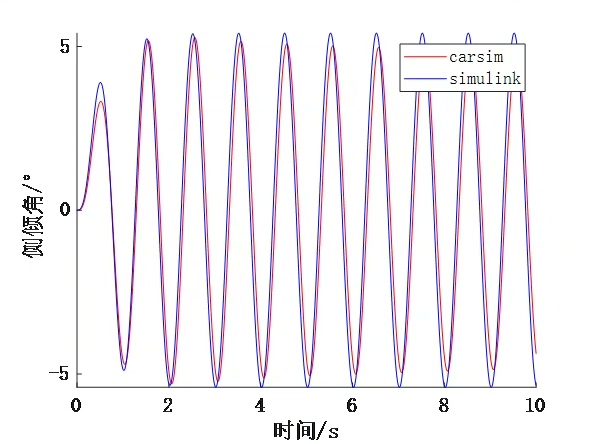
vehicle.COG_height = 0.55; % 质心高度侧倾角响应立刻发生变化。有个反直觉的现象:当质心高度增加20%时,转向时的侧倾角增量并非线性上升,而是呈现指数趋势,这说明模型成功捕捉到了悬挂几何的非线性特性。
建议跑仿真时重点关注俯仰角与侧倾角的耦合现象。在紧急制动工况下,这两个角度的变化率会相互影响,我们专门写了个交叉验证函数:
matlab
function check_pitch_roll_coupling(logsout)
pitch = logsout.get('pitch').Values;
roll = logsout.get('roll').Values;
cross_corr = xcorr(pitch.Data, roll.Data, 50, 'coef');
if max(cross_corr) > 0.35
warning('强耦合现象出现');
end
end这个脚本能自动检测是否存在异常耦合,对于排查悬挂参数设置错误特别有效。整套模型文件已封装成带版本管理的工程包,包含二十多个可配置子模块,改个路面输入就能切到扭力梁悬架分析------毕竟,模型的可玩性才是持续迭代的动力嘛。