位姿变换基础
空间中一个坐标系相对于另一个坐标系的变换关系用新坐标系的三个坐标轴相对于原坐标系的方向矢量(方向余弦)
来确定,可用位姿矩阵来描述。位姿齐次矩阵(4x4)来统一描述刚体的位置和姿态:
位姿变换基
和沿着三个坐标轴的平移运动不一样,旋转矩阵显得很不直观,也繁琐。因此往往需要使用更简洁的方式来描述
姿态变换。固定欧拉角与欧拉角便是最常规的两种。
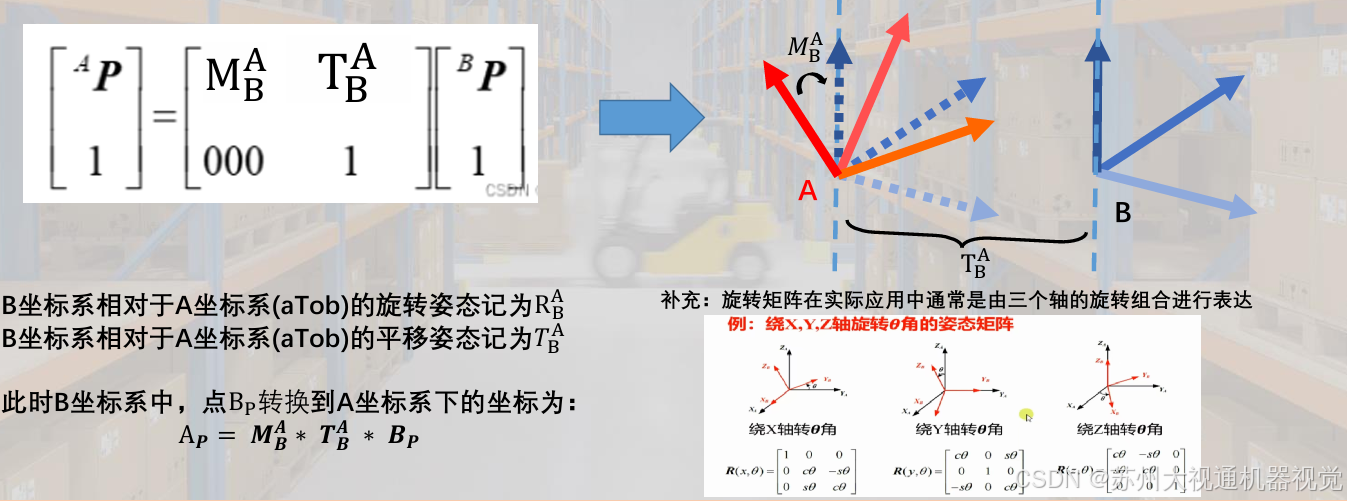
坐标变换位姿表达
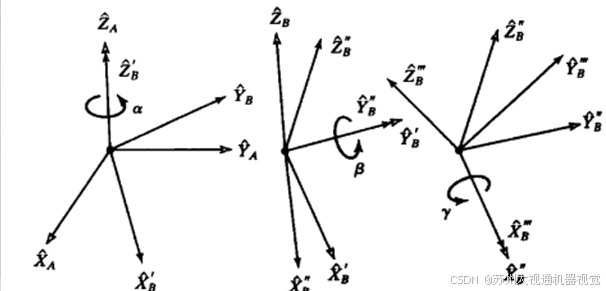
如图所示,首先将目标坐标系{B}与参考坐标系{A}重合,将坐
标系{B}先绕XA轴旋转γ度,再将坐标系{B}绕YA轴旋转β度,
最后将坐标系{B}绕ZA轴旋转α度。最终得到新的坐标系{B}。
B系一直在绕固定系A旋转,此时旋转矩阵为左乘
基于坐标系绕轴向量的旋转公式,由旋转顺序(先转的轴在
后,后转的轴在前)可直接推导:
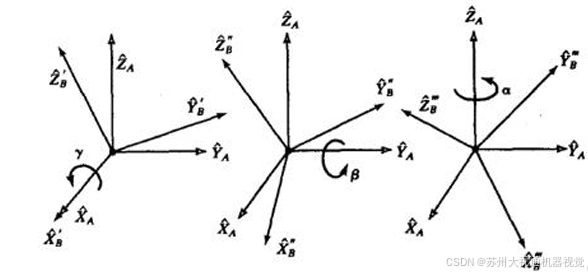
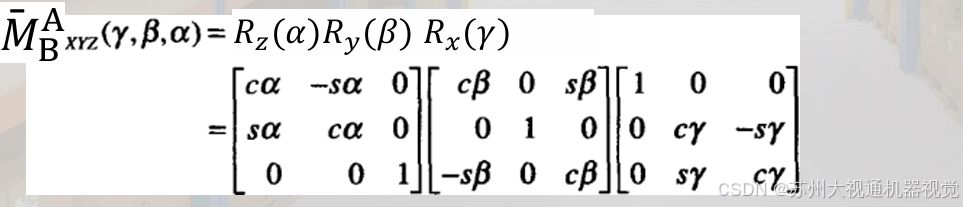
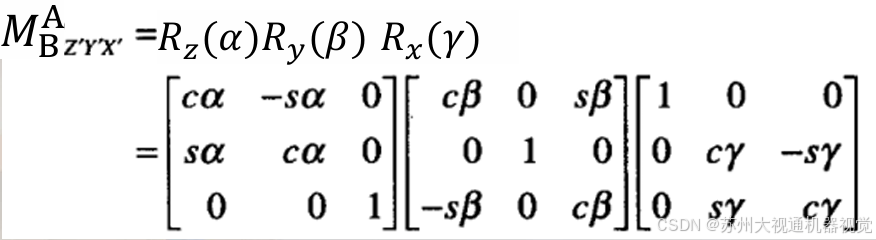
如下图所示,首先将目标坐标系{B}与参考坐标系{A}重合,将坐标系{B}先绕ZB轴旋转α度,再绕旋转后的坐标系{B}的YB轴旋转β度,最后再绕旋转后的坐标系{B}的XB轴旋转γ度。最终得
到新的坐标系{B}。
B系一直在绕自身轴旋转,此时旋转矩阵为右乘基于坐标系绕轴向量的旋转公式,由旋转顺序(先转的轴在前,后转的轴在后)可直接推导:
Z-Y-X欧拉角和X-Y-Z固定角的旋转矩阵完全相同三次绕固定轴旋转的最终姿态和以相反顺序三次绕运动坐标轴旋转最终姿态相同。