设计目标先行:从性能预算倒推协议形态
在多智能体系统中,通信开销往往不是"边缘问题",而是系统瓶颈来源。典型场景包括:
-
Planner Agent 向多个 Tool Agent 并发调用;
-
协同 Agent 之间进行高频状态同步;
-
推理 Agent 将"逐步思考结果"以流式形式回传;
-
多模型投票或对抗式协商。
在这些场景中,通信特征通常是:
-
高频调用(QPS 高);
-
消息体较小(结构化指令与状态);
-
对延迟敏感(几十毫秒级别影响整体响应时间);
-
需要流式交互;
-
运行在容器化环境(如 Kubernetes)。
因此,在设计"轻量级 RPC"协议前,我们需要明确目标约束:
-
单次调用额外开销 < 5--10ms;
-
支持双向流;
-
低连接管理成本;
-
可观测、可治理;
协议对比:从常见方案到定制需求
HTTP/1.1 + JSON
特点:
-
文本协议;
-
每次请求-响应;
-
Header 冗长;
-
无内建流式;
-
解析成本高。
性能特征:
-
延迟:较高;
-
CPU开销:明显;
-
吞吐量:中等;
-
连接复用能力:有限(keep-alive)。
适用场景:
-
对性能不敏感;
-
外部 API 调用;
-
快速开发。
不适用于:
- 高频 Agent 内部通信。
HTTP/2 + Protobuf
改进点:
-
二进制帧;
-
多路复用;
-
Header 压缩;
-
与 Protobuf 配合减少序列化成本。
性能表现:
-
延迟明显优于 HTTP/1.1;
-
连接复用能力强;
-
CPU 占用下降。
优势:
-
兼容现有生态;
-
易于调试;
-
支持流式。
gRPC
gRPC 基于 HTTP/2 + Protobuf,提供:
-
强类型接口定义;
-
双向流;
-
自动代码生成;
-
内建健康检查机制;
-
支持拦截器与负载均衡。
性能特点:
-
延迟低;
-
吞吐量高;
-
序列化效率高;
-
连接稳定。
缺点:
-
相对复杂;
-
与浏览器兼容性有限
-
依赖 HTTP/2 栈。
自定义 TCP 二进制协议
优点:
-
极低开销;
-
完全可控;
-
可针对特定场景优化。
缺点:
-
需要自建负载均衡;
-
需自行处理粘包/分包;
-
缺少成熟生态;
-
可观测性与治理复杂。
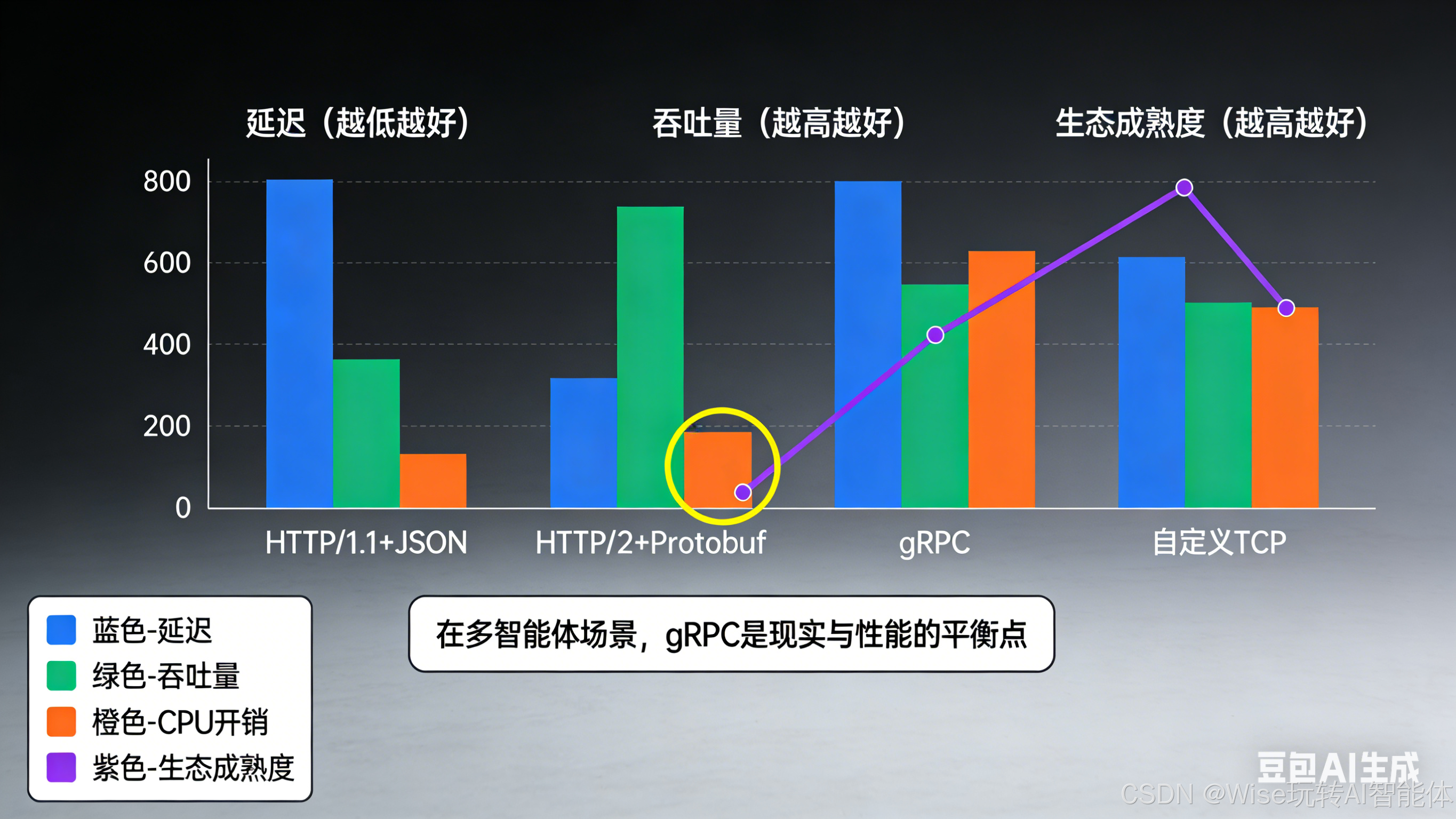
解决方案性能对比
|-------------------|----|-----|------|------|-------|
| 协议 | 延迟 | 吞吐量 | 连接管理 | 流式支持 | 工程复杂度 |
| HTTP/1.1 + JSON | 高 | 中 | 中 | 弱 | 低 |
| HTTP/2 + Protobuf | 中低 | 高 | 强 | 强 | 中 |
| gRPC | 低 | 高 | 强 | 强 | 中高 |
| 自定义 TCP | 最低 | 最高 | 自建 | 自建 | 高 |
在多数 Agent 场景下,gRPC 是现实与性能之间的平衡点。
Agent 专属 RPC 设计:功能与约束
基于 gRPC/HTTP2 构建专属框架,重点在接口与行为层设计。
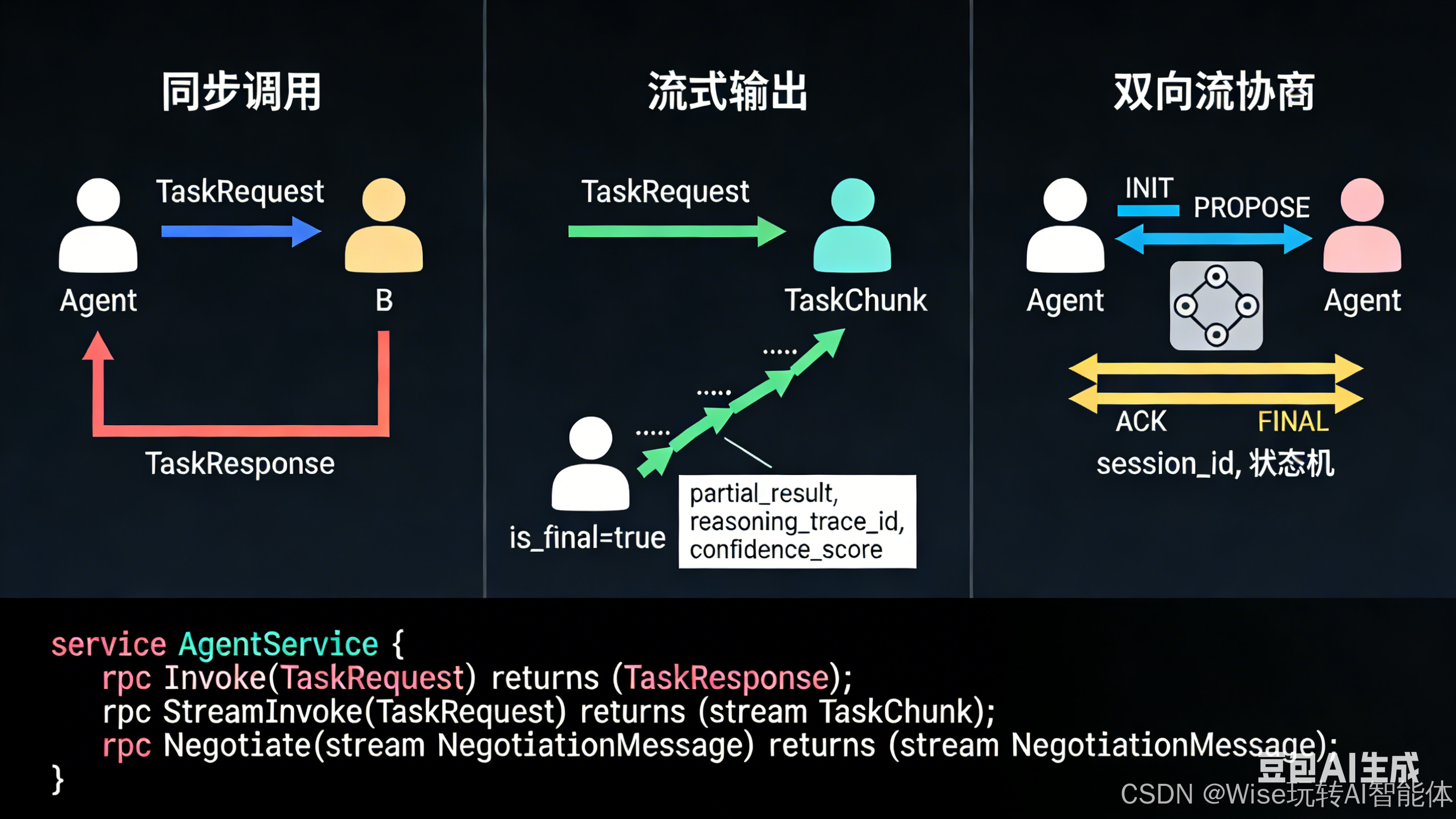
核心通信模型
三类 RPC 通讯模型:
-
同步调用
-
逐步输出(流式)
-
协商与协作
示例定义(Protobuf)
service AgentService {
rpc Invoke(TaskRequest)
returns (TaskResponse);
rpc StreamInvoke(TaskRequest)
returns (stream TaskChunk);
rpc Negotiate(stream NegotiationMessage)
returns (stream NegotiationMessage);
}支持逐步思考输出
对于"逐步思考"场景:
-
每个 chunk 包含:
-
partial_result
-
reasoning_trace_id
-
confidence_score
-
is_final
-
避免:一次性大响应&&长时间阻塞。
双向流协商
多 Agent 协商典型场景:
-
任务分配;
-
多模型投票;
-
状态同步。
要求:
-
低延迟交互;
-
持久连接;
-
明确状态标识。
建议设计:
-
每条消息包含 session_id;
-
状态机明确(INIT / PROPOSE / ACK / FINAL)。
服务发现与健康检查
如果在 Kubernetes 中运行,服务动态变化。需要实现以下功能
服务发现
使用:
-
Kubernetes DNS;
-
或 Service Mesh(如 Istio);
-
或 gRPC 内建负载均衡策略。
推荐:使用 Headless Service + 客户端负载均衡;
健康检查
gRPC 提供标准健康检查接口。
实践中:
-
每个 Agent 实现健康检查服务;
-
返回:
-
CPU负载;
-
内存使用;
-
当前队列长度;
-
是否可接收新任务。
-
可用于:
-
动态流量控制;
-
自动扩容。
常见性能优化实践
连接复用
-
使用长连接;
-
减少 TLS 握手次数;
-
使用 HTTP/2 多路复用。
序列化优化
-
使用 Protobuf;
-
避免不必要字段;
-
对大字段(如日志)进行压缩。
零拷贝与内存管理
在高频场景下:
-
减少中间 buffer;
-
使用对象池;
-
控制 GC 频率。
超时与重试策略
设计合理超时:
-
Unary RPC < 1--2 秒;
-
流式 RPC 心跳机制。
避免:重试风暴;无限等待。
何时考虑自定义 TCP 协议?
只有在以下条件下才值得:
-
QPS > 数万级;
-
每次调用延迟预算 < 1--2ms;
-
环境封闭;
-
团队具备底层网络协议开发能力。
否则,维护成本往往高于收益。

设计原则总结
多智能体通信协议设计,应遵循:
-
优先使用成熟二进制协议;
-
连接长驻,避免频繁建立;
-
内建流式支持;
-
明确状态机;
-
保持可观测性与可调试性。
结语:通信层决定多智能体系统上限
在单 Agent 场景中,模型性能是瓶颈;在多 Agent 场景中,通信性能成为系统上限。
一个看似微小的 10ms 开销,在多级 Agent 链路中可能被放大数倍。因此,通信协议不是基础设施细节,而是架构核心。选择合适的 RPC 框架,往往比微调模型参数更能带来整体性能提升。