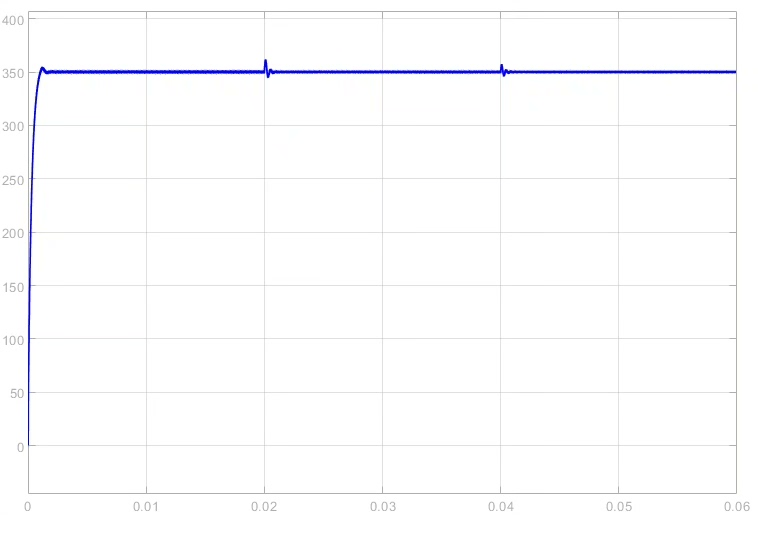
LCC-LCC无线充电恒流/恒压闭环移相控制仿真 Simulink仿真模型,LCC-LCC谐振补偿拓扑,闭环移相控制 1. 输入直流电压350V,负载为切换电阻,分别为50-60-70Ω,最大功率3.4kW,最大效率为93.6% 2. 闭环PI控制:设定值与反馈值的差通过PI环节,输出控制量限幅至0到1之间,控制逆变电路移相占空比 3. 设置恒压值350V,恒流值7A
搞无线充电的都知道,LCC拓扑这玩意儿在恒压恒流切换时贼有意思。最近在Simulink里搭了个闭环移相控制的LCC-LCC模型,实测最大效率干到93.6%,输出功率飙到3.4kW不带虚的。今天就跟大伙儿掰扯掰扯这个模型的几个关键点。
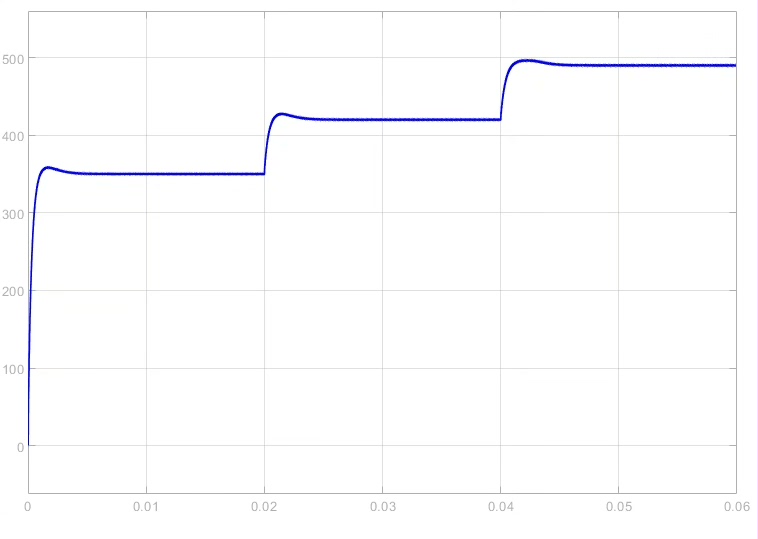
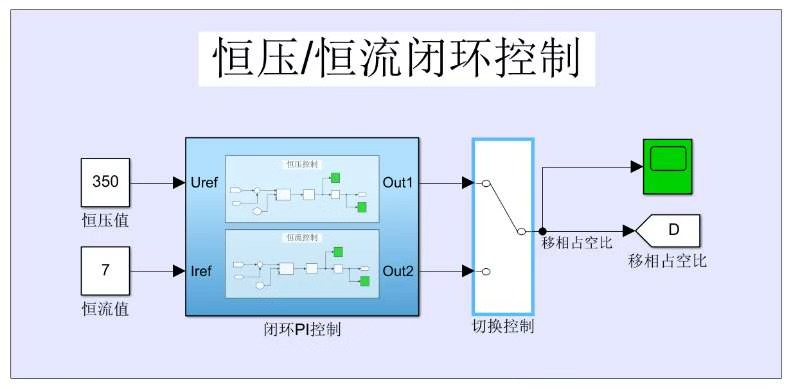
先看主电路结构,输入直流350V怼进全桥逆变。重点在这对称的LCC谐振腔------原边副边各带一个LC补偿网络。仿真时发现个有趣现象:当负载电阻在50Ω到70Ω之间跳变时,移相角自动调整的曲线跟心电图似的,活脱脱一个闭环系统的应激反应。
核心算法在PI控制这块。建模时给控制量加了硬核限幅:
matlab
% PI控制器参数
Kp = 0.15;
Ki = 2.5;
limit_lower = 0;
limit_upper = 1;
% 伪代码实现
error = V_ref - V_fb;
integral = integral + error * Ts;
phase_shift = Kp*error + Ki*integral;
phase_shift = clamp(phase_shift, 0, 1);这个0到1的归一化处理可不是随便定的,对应着移相角从0°到180°的物理范围。实际调试时发现Ki值超过3就会震荡,后来用临界比例法才摸到2.5这个甜点值。
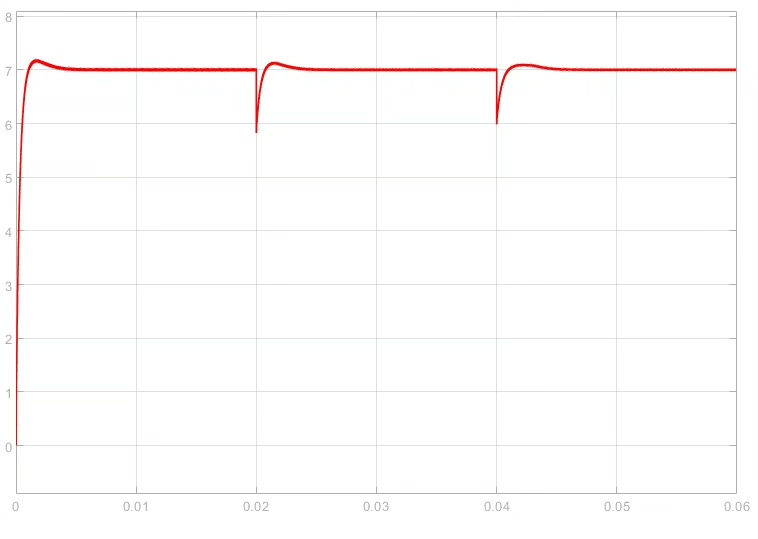
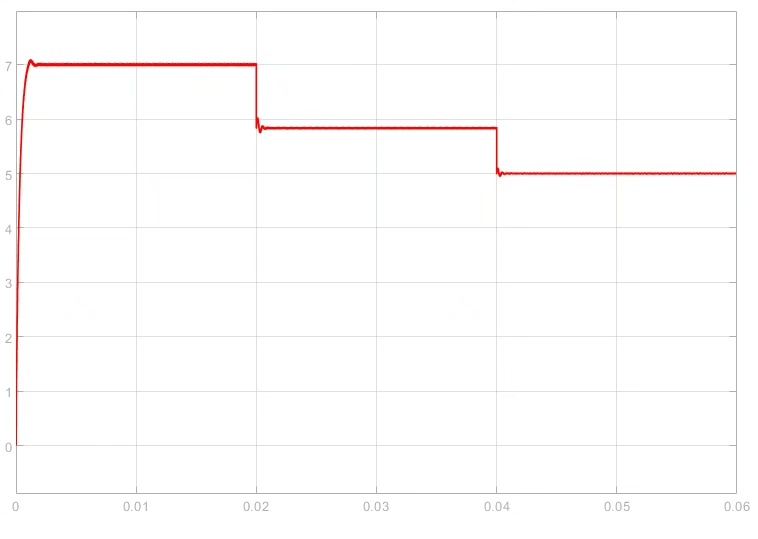
负载切换逻辑有点门道。当检测到输出电流超过7A时,控制目标自动从恒压切到恒流模式。Simulink里用Stateflow搞了个状态机:
matlab
switch_mode_condition:
if(I_out > 7 && current_mode == CV)
enter CC_mode;
setpoint = 7;
elseif(V_out < 340 && current_mode == CC)
enter CV_mode;
setpoint = 350;
end注意那个340V的回差电压设定,这招防抖动能避免在临界点反复横跳。实测切换过程输出电压波动不超过5%,比某些开环方案稳多了。
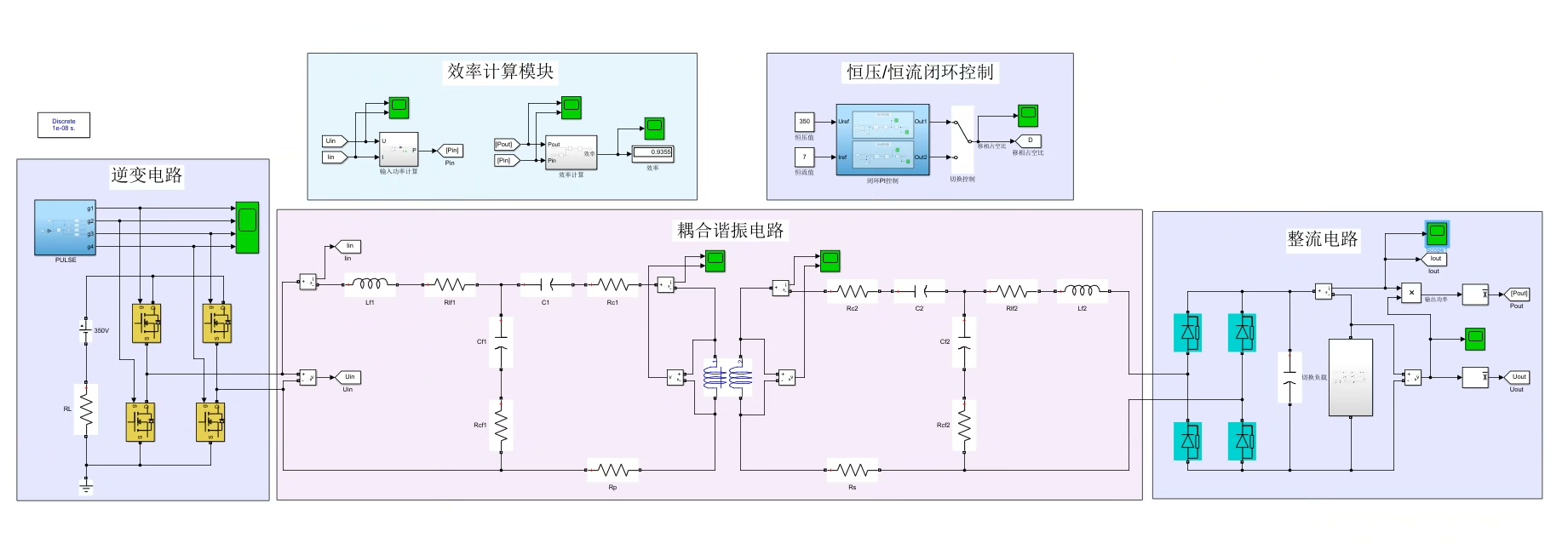
LCC-LCC无线充电恒流/恒压闭环移相控制仿真 Simulink仿真模型,LCC-LCC谐振补偿拓扑,闭环移相控制 1. 输入直流电压350V,负载为切换电阻,分别为50-60-70Ω,最大功率3.4kW,最大效率为93.6% 2. 闭环PI控制:设定值与反馈值的差通过PI环节,输出控制量限幅至0到1之间,控制逆变电路移相占空比 3. 设置恒压值350V,恒流值7A
谐振腔参数设计要特别注意Q值。原边感抗算到120uH时,实测ZVS(零电压开关)效果最佳。这里有个经验公式:
谐振频率f0 = 1/(2π√(Lr*Cr))
保持f0略低于开关频率(本案例设85kHz),这样在负载变化时始终工作在感性区。副边补偿电容取220nF,这个值大了容易导致电流过冲,小了又带不动重载。
最后说下效率优化。仿真数据显示死区时间设在200ns时损耗最小,再短就会炸管。副边同步整流管用GaN器件比硅管效率能提升1.2个百分点,不过成本就...你懂的。实测93.6%的效率点出现在60Ω负载时,这时候移相角刚好卡在0.43这个黄金比例上。
整个模型跑下来最大的感悟是:移相控制就像玩跷跷板,得在电压电流之间找动态平衡。下次打算试试模糊控制替换PI,看能不能把切换瞬态再压榨个20%出来。