这是一个非常容易混淆的概念。同样是"3D ",在不同的领域,这第三个**"D"代表的含义完全不同**。
如果不搞清楚这两个的区别,你和算法工程师沟通时就会出现这种尴尬场面:
- 你说:"我要做 3D 检测。"(你心里想的是测零件的高度)
- 算法工程师说:"好,上高光谱相机。"(他以为你要测零件的化学成分)
- 结果:牛头不对马嘴,浪费几万块钱。
今天我们用最通俗的例子---"真苹果 vs 蜡做的假苹果",来彻底搞懂这两个概念。
第一部分:三维图像 (3D Image)---几何的世界
我们通常说的"3D 视觉"、"3D 扫描"、"激光雷达(LiDAR)",都属于这一类。
1. 维度的定义
这里的 3D 指的是: 空间坐标 (X,Y,Z)(X, Y, Z)(X,Y,Z)。
- X, Y: 图像的宽和高。
- Z (Depth): 深度/距离。也就是物体表面离相机有多远。
2. 它能看到什么?
它看到的是物体的 "皮囊"(外形、轮廓、体积、凹凸)。
例子: 你把一个真苹果和一个做的非常逼真的蜡像苹果放在桌子上。
3D 图像的视角:
- 它会告诉你:这两个东西都是圆球形的,直径都是 8cm,表面都很光滑。
- 结论: 无法区分。因为它们的几何形状是一模一样的。
3. 核心技术
硬件: 双目相机、结构光、ToF、激光雷达。
数据形式: 点云(Point Cloud, .ply, .pcd)或 深度图(Depth Map)。
第二部分:三维光谱 (3D Spectroscopy / Hyperspectral)---化学的世界
这里的"3D",是数学意义上的"数据立方体(Data Cube)",而不是物理空间的 3D。
1. 维度的定义
这里的 3D 指的是 空间坐标 + 波长 (X,Y,λ)(X, Y, \lambda)(X,Y,λ)。
- X, Y: 图像的宽和高(还是平面的)。
- λ\lambdaλ (Lambda): 光的波长。
教授的比喻:想象一本书。
- 书的封面是普通的 2D 照片(RGB 只有 3 页)。
- 三维光谱(高光谱) 是一本几百页厚的书。每一页都只记录一种特定颜色的光(比如第 10 页只记录 500nm 的光,第 11 页只记录 502nm 的光)。
- 把这些页叠在一起,就变成了一个 "立方体"。
2. 它能看到什么?
它看到的是物体的 "灵魂"(材质、成分、化学指纹)。
例子: 还是那个真苹果和蜡苹果。
3D 光谱的视角:
-
它不关心形状 (在它看来都是平的圆圈)。它看每一个像素的光谱曲线。
-
真苹果: 在近红外波段(比如 700-1000nm)有强烈的水分吸收峰和叶绿素反射峰。
-
蜡苹果: 光谱曲线是石蜡(烃类化合物)的特征,完全没有水的吸收峰。
-
结论: 一眼识破。一个是植物,一个是石油副产品。
3. 核心技术
硬件:高光谱相机(推扫式 Push-broom、快照式 Snapshot)。
数据形式: 高光谱立方体(Hypercube, .envi, .hdr)。
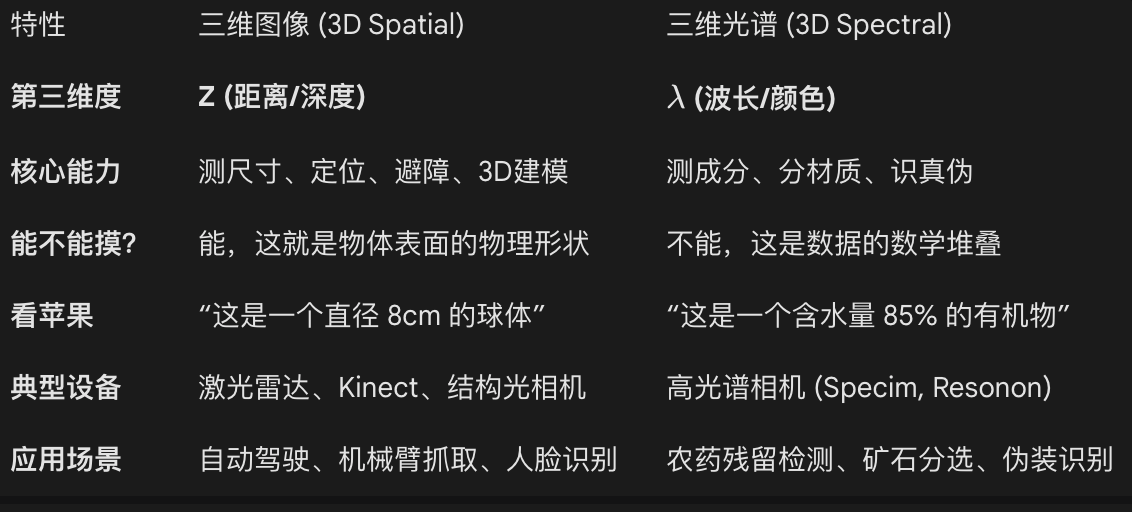
第三部分:一张图总结异同特性
第四部分:终极形态---4D 视觉 (Spatial + Spectral)
既然它们各有所长,能不能合体?
当然可以。现在的科研前沿,就是把 3D 激光雷达 和 高光谱相机 结合起来。由此产生的数据是 4D 的:(X,Y,Z,λ)(X, Y, Z, \lambda)(X,Y,Z,λ)。
1) 效果: 你不仅知道面前有个形状像人的东西(3D 图像),还知道它是真的人,而不是一个逼真的硅胶人偶(3D 光谱)。
2) 应用:
- 精准农业: 既知道果树有多高(3D 图像 -> 算生物量),又知道哪棵树缺氮肥(3D 光谱 -> 算营养)。
- 文物修复: 既知道佛像表面的微小裂痕深度(3D 图像),又知道颜料是哪个朝代的矿物颜料(3D 光谱)。
总结
-
想知道"它是圆的还是扁的",用三维图像(LiDAR/结构光)。
-
想知道"它是硅胶做的还是铁做的",用三维光谱(高光谱)。