买了Jetson Orin Nano。看到说明书中有个Optional: RTC Back-up Coin Cell Socket。
这个到底是干什么的?
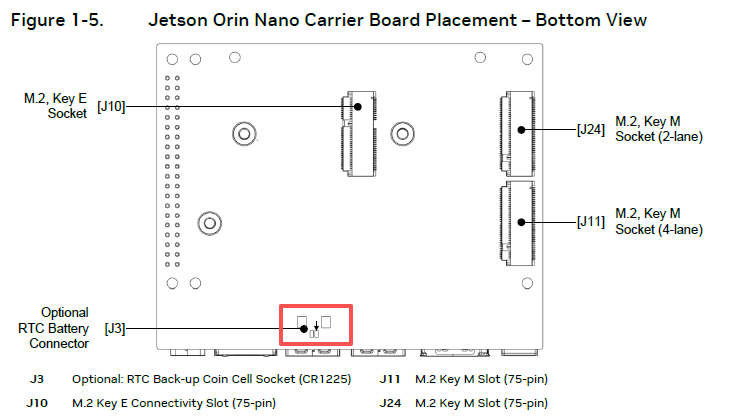
这个位于Jetson Orin 系列主板背面 ,用于安装纽扣电池的插座 。它的作用是当系统完全断电 时,为主板上的 RTC(实时时钟,Real-Time Clock)模块提供持续供电,保证系统在完全断电后依然能记住正确的时间。
一、拆解术语
| 英文 | 中文 | 功能解释 |
|---|---|---|
| RTC | 实时时钟 | 主板上的一个独立计时芯片,负责记录当前时间(年/月/日/时/分/秒),即使主系统关机,它也要继续走时。 |
| Back-up | 备份 | 当主电源断开时,由备用电源继续供电。 |
| Coin Cell | 纽扣电池 | 常见型号如 CR2032(3V锂电池),就是电脑主板上那种扁圆电池。 |
| Socket | 插座 | 一个物理卡槽,用于安装纽扣电池,无需焊接,方便更换。 |
二、这个有什么用?
如果机器人(搭载Cartographer 3D),这个功能看似不起眼,但在实际部署中其实挺重要的:
1. 保持文件时间戳正确
-
机器人采集的 ROS Bag包、地图文件、日志文件,都会带有时间戳。
-
如果没有RTC电池,每次断电重启后,系统时间都会恢复到 1970年1月1日(或固件默认时间)。
-
后果:你录制的数据时间戳全乱,后期查找哪个bag是今天跑的、哪个是昨天跑的,会非常混乱。
2. 多机协同 / 分布式系统
-
如果你的医院里有多个机器人,它们需要通过网络(NTP)同步时间。
-
但如果某台机器人每次重启时间都归零,它需要联网重新校准时间。在Wi-Fi信号不好的区域(地下车库、走廊深处),可能会出现一段时间的时间不同步,影响多机协同任务。
3. 网络安全 / 证书验证
-
很多现代通信协议(如HTTPS、MQTT over TLS)依赖系统时间正确来验证SSL证书的有效期。
-
如果时间不对,机器人可能无法连接云端服务器,或者无法建立安全连接。
4. 省去每次手动设时间
-
没有这个电池,每次断电重启后,你都需要手动
date命令或者依赖NTP联网校时。 -
在开发调试阶段,如果频繁断电,每次都要等它联网更新时间,很烦人。
三、总结
如果你的应用场景是 长时间运行的商业部署 ,或者 数据记录很重要 ,建议焊上这个电池(几块钱的CR2032)。这个小细节能让你在后期数据分析和系统维护中少很多头疼。
| 项目 | 说明 |
|---|---|
| 电池型号 | 通常是 CR2032(3V锂锰电池) |
| 在机器人上的意义 | 保持文件时间戳不乱、便于多机协同、网络校时过渡 |
| 要不要用 | 推荐使用,成本极低,省去很多维护麻烦 |