适合人群:零基础新手,只要有一台 Mac(或 Linux),跟着本文一步步操作就能跑通。
最终效果 :在 Docker 容器中用 openYuanrong 分布式框架训练一个 CartPole 倒立摆 Agent,
并生成可视化训练回放页面。
预计耗时:30-60 分钟(取决于网速)
最终训练效果:
录屏2026-02-24 19.45.46
目录
- 前置准备
- 项目结构总览
- [搭建 Docker 环境](#搭建 Docker 环境)
- [下载 openYuanrong 安装包](#下载 openYuanrong 安装包)
- [编写 Dockerfile 和 docker-compose.yml](#编写 Dockerfile 和 docker-compose.yml)
- [构建 Docker 镜像](#构建 Docker 镜像)
- [启动容器并安装 curl](#启动容器并安装 curl)
- [理解代码:6 个 Python 文件详解](#理解代码:6 个 Python 文件详解)
- 运行训练
- 生成可视化页面
- 常见问题与踩坑记录
1. 前置准备
在开始之前,请确认你的电脑上已经安装了以下工具:
| 工具 | 用途 | 安装方式 |
|---|---|---|
| Docker Desktop | 运行 Linux 容器 | 官网下载 |
| 终端 | 执行命令 | macOS 自带 Terminal 或 iTerm2 |
| 浏览器 | 查看可视化结果 | Chrome / Safari / Firefox 均可 |
| VPN 代理(可选) | 国内网络下载 whl 包 | 如果你在国内,需要能访问华为云 OBS |
关于 Apple Silicon(M1/M2/M3) :openYuanrong 目前只提供 x86_64 版本的 whl 包,
但不用担心------Docker Desktop 通过 Rosetta 2 可以模拟运行 x86_64 镜像,
你会看到一个 platform 警告,这是正常的,不影响使用。
2. 项目结构总览
我们最终要创建的文件结构如下:
openYuanrong/ # 项目根目录(名字随意)
├── docker/
│ ├── Dockerfile # Docker 镜像定义
│ ├── docker-compose.yml # 容器编排配置
│ └── openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl # 安装包
└── examples/
└── rl_agent/
├── config.py # 超参数配置
├── policy.py # 策略网络(纯 NumPy)
├── worker.py # 分布式 Worker
├── learner.py # 中心化 Learner
├── train.py # 主训练脚本
└── visualize.py # 可视化生成器3. 搭建 Docker 环境
为什么用 Docker?
openYuanrong 的 whl 包是 manylinux_2_34_x86_64 格式,只能在 Linux x86_64 环境下运行。
用 Docker 可以在任何电脑上创建一个干净的 Linux 环境,避免污染本机系统。
3.1 确认 Docker 已启动
打开终端,运行:
bash
docker --version如果看到类似 Docker version 27.x.x 的输出,说明 Docker 已安装。
确保 Docker Desktop 应用已经打开并运行(状态栏有鲸鱼图标)。
3.2 创建项目目录
bash
mkdir -p openYuanrong/docker
mkdir -p openYuanrong/examples/rl_agent
cd openYuanrong4. 下载 openYuanrong 安装包
openYuanrong 的 whl 安装包托管在华为云 OBS 上,文件大约 932MB,下载需要一些时间。
4.1 直接下载(网络畅通时)
bash
cd docker
curl -L -O https://openyuanrong.obs.cn-southwest-2.myhuaweicloud.com/release/0.7.0/linux/x86_64/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl4.2 通过代理下载(国内网络)
如果你在国内且有 VPN 代理(比如 Clash 运行在 127.0.0.1:7897):
bash
cd docker
curl -x http://127.0.0.1:7897 -L -O https://openyuanrong.obs.cn-southwest-2.myhuaweicloud.com/release/0.7.0/linux/x86_64/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl⚠️ 踩坑提醒 1:文件名不能改!
下载后的文件名必须保持原样
openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl。pip 安装 whl 文件时会校验文件名格式,如果你重命名了(比如改成
openyuanrong.whl),会报错:
ERROR: openyuanrong.whl is not a valid wheel filename.
4.3 验证下载
bash
ls -lh openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl应该看到文件大小约 932MB。如果文件明显偏小(比如几 KB),说明下载失败,请重试。
5. 编写 Dockerfile 和 docker-compose.yml
5.1 创建 Dockerfile
在 docker/ 目录下创建 Dockerfile,内容如下:
dockerfile
FROM --platform=linux/amd64 python:3.9-slim
# 从本地复制预下载的 whl 包(保留原始文件名)
COPY openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl /tmp/
# 安装 openYuanrong + RL 依赖
RUN pip install --no-cache-dir -i https://pypi.tuna.tsinghua.edu.cn/simple \
/tmp/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl gymnasium numpy \
&& rm /tmp/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl
WORKDIR /workspace
CMD ["bash"]逐行解释:
| 行 | 说明 |
|---|---|
FROM --platform=linux/amd64 python:3.9-slim |
使用 Python 3.9 精简版镜像,强制指定 x86_64 平台(因为 whl 只支持 x86_64) |
COPY ... /tmp/ |
把本地下载好的 whl 包复制到镜像中。必须用原始文件名,否则 pip 校验失败 |
RUN pip install ... |
安装三个包:openYuanrong、gymnasium(RL 环境)、numpy(数值计算)。使用清华镜像加速 |
&& rm ... |
安装完后删除 whl 文件,减小镜像体积 |
WORKDIR /workspace |
设置工作目录 |
CMD ["bash"] |
容器启动后进入 bash |
⚠️ 踩坑提醒 2:
--platform=linux/amd64必须加!如果你用的是 Apple Silicon Mac(M1/M2/M3),不加这个参数的话,
Docker 会拉取 ARM 版本的 Python 镜像,然后安装 x86_64 的 whl 会失败。
加了之后 Docker 会通过 Rosetta 2 模拟 x86_64 环境。
5.2 创建 docker-compose.yml
在 docker/ 目录下创建 docker-compose.yml:
yaml
services:
yuanrong:
build:
context: .
dockerfile: Dockerfile
container_name: yuanrong-dev
volumes:
- ../examples:/workspace/examples
stdin_open: true
tty: true逐行解释:
| 配置项 | 说明 |
|---|---|
build.context: . |
构建上下文是 docker/ 目录(whl 文件在这里) |
container_name: yuanrong-dev |
给容器起个固定名字,方便后续 docker exec |
volumes: ../examples:/workspace/examples |
把本机的 examples/ 目录挂载到容器内,这样修改代码不用重建镜像 |
stdin_open: true + tty: true |
保持容器运行不退出(等价于 docker run -it) |
6. 构建 Docker 镜像
回到项目根目录,执行构建命令:
6.1 如果你不需要代理
bash
docker compose -f docker/docker-compose.yml build --no-cache6.2 如果你需要代理(国内网络)
bash
docker compose -f docker/docker-compose.yml build --no-cache \
--build-arg http_proxy=http://host.docker.internal:7897 \
--build-arg https_proxy=http://host.docker.internal:7897⚠️ 踩坑提醒 3:代理地址用
host.docker.internal,不是127.0.0.1!Docker 构建过程运行在容器内部,
127.0.0.1指向的是容器自己,不是你的 Mac。
host.docker.internal是 Docker Desktop 提供的特殊域名,指向宿主机。
6.3 构建过程
构建大约需要 2-5 分钟(取决于网速和机器性能)。你会看到类似输出:
[+] Building 120.5s (7/7) FINISHED
=> [1/4] FROM docker.io/library/python:3.9-slim@sha256:...
=> [2/4] COPY openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl /tmp/
=> [3/4] RUN pip install --no-cache-dir ...
=> [4/4] WORKDIR /workspace如果你在 Apple Silicon Mac 上看到这个警告,完全正常,忽略即可:
WARNING: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8)
7. 启动容器并安装 curl
7.1 启动容器
bash
docker compose -f docker/docker-compose.yml up -d-d 表示后台运行。启动后验证容器状态:
bash
docker ps应该看到一个名为 yuanrong-dev 的容器在运行。
7.2 安装 curl(重要!)
openYuanrong 在初始化时(yr.init())需要用 curl 做健康检查。
python:3.9-slim 镜像默认没有 curl,必须手动安装。
bash
docker exec -e http_proxy="" -e https_proxy="" yuanrong-dev bash -c "apt-get update && apt-get install -y curl"⚠️ 踩坑提醒 4:安装 curl 时必须清空代理环境变量!
如果你构建镜像时用了代理(
--build-arg http_proxy=...),这些环境变量会残留在容器中。
apt-get通过代理访问 Debian 软件源会返回 502 错误。解决方法:用
-e http_proxy="" -e https_proxy=""临时清空代理。为什么不在 Dockerfile 里装 curl?
因为 Dockerfile 的
RUN指令会继承--build-arg设置的代理,而 apt-get 通过代理访问 Debian 源经常失败。
在容器启动后手动装,可以绕过代理问题。
7.3 验证环境
进入容器检查一切是否就绪:
bash
docker exec -it yuanrong-dev bash在容器内执行:
bash
python -c "import yr; print('openYuanrong OK')"
python -c "import gymnasium; print('Gymnasium OK')"
python -c "import numpy; print('NumPy OK')"
curl --version四条命令都应该正常输出,没有报错。确认后输入 exit 退出容器。
8. 理解代码:6 个 Python 文件详解
本节详细解释每个文件的作用和关键代码。所有文件都放在 examples/rl_agent/ 目录下。
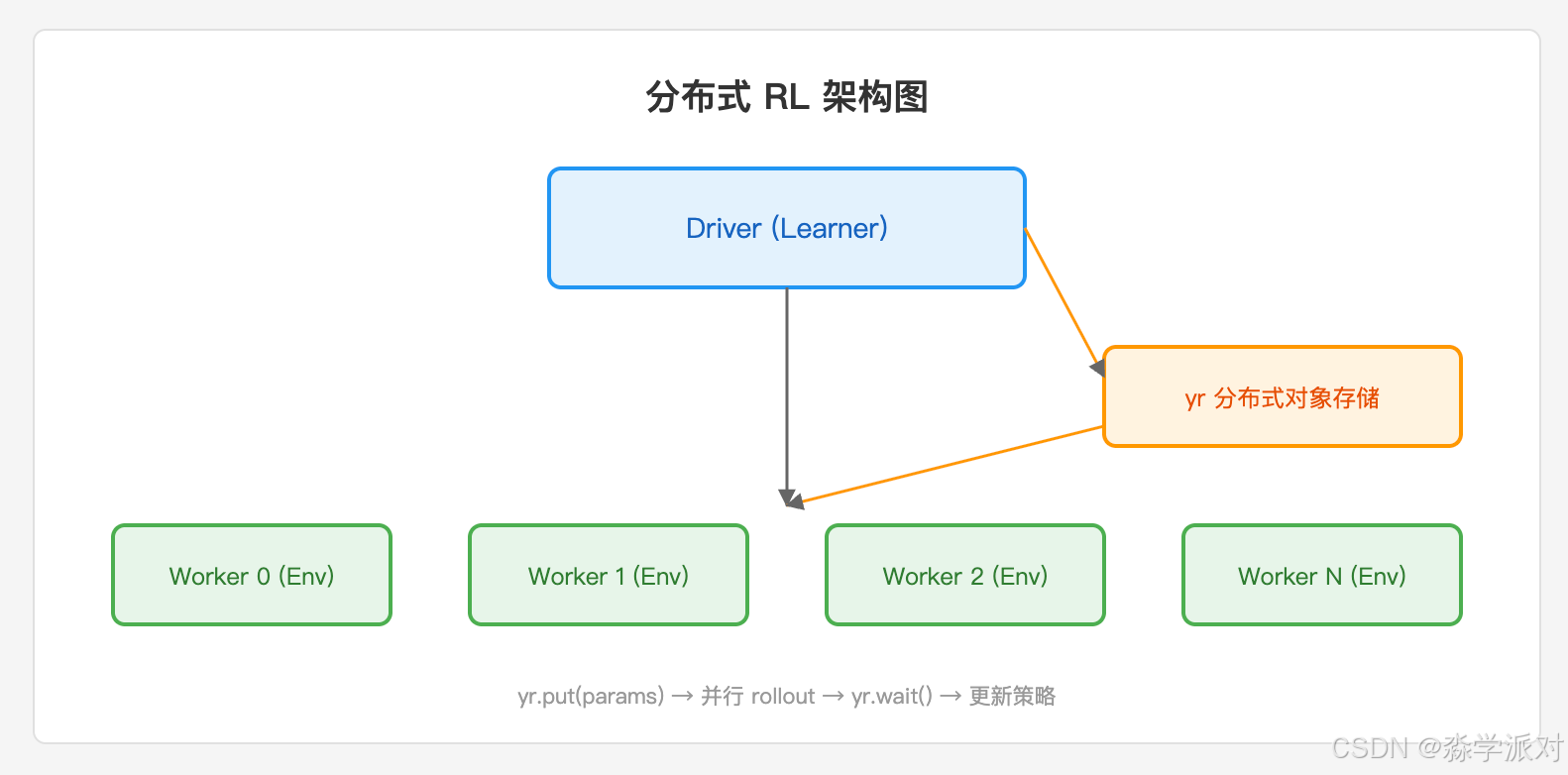
整体架构
我们要构建的是一个 "多 Worker 并行采样 + 中心化 Learner" 的分布式强化学习系统:
┌─────────────────────────────────────────────────────┐
│ Driver 进程 │
│ ┌──────────┐ yr.put() ┌──────────────────┐ │
│ │ Learner │ ──────────────→│ 对象存储(参数) │ │
│ │ (策略更新) │ ←──────────────│ │ │
│ └──────────┘ yr.get() └──────────────────┘ │
│ ↑ ↓ │
│ │ 经验数据 策略参数 │ │
│ │ ↓ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │Worker-0 │ │Worker-1 │ │Worker-2 │ │Worker-3 │ │
│ │(采样) │ │(采样) │ │(采样) │ │(采样) │ │
│ └─────────┘ └─────────┘ └─────────┘ └─────────┘ │
└─────────────────────────────────────────────────────┘训练流程:
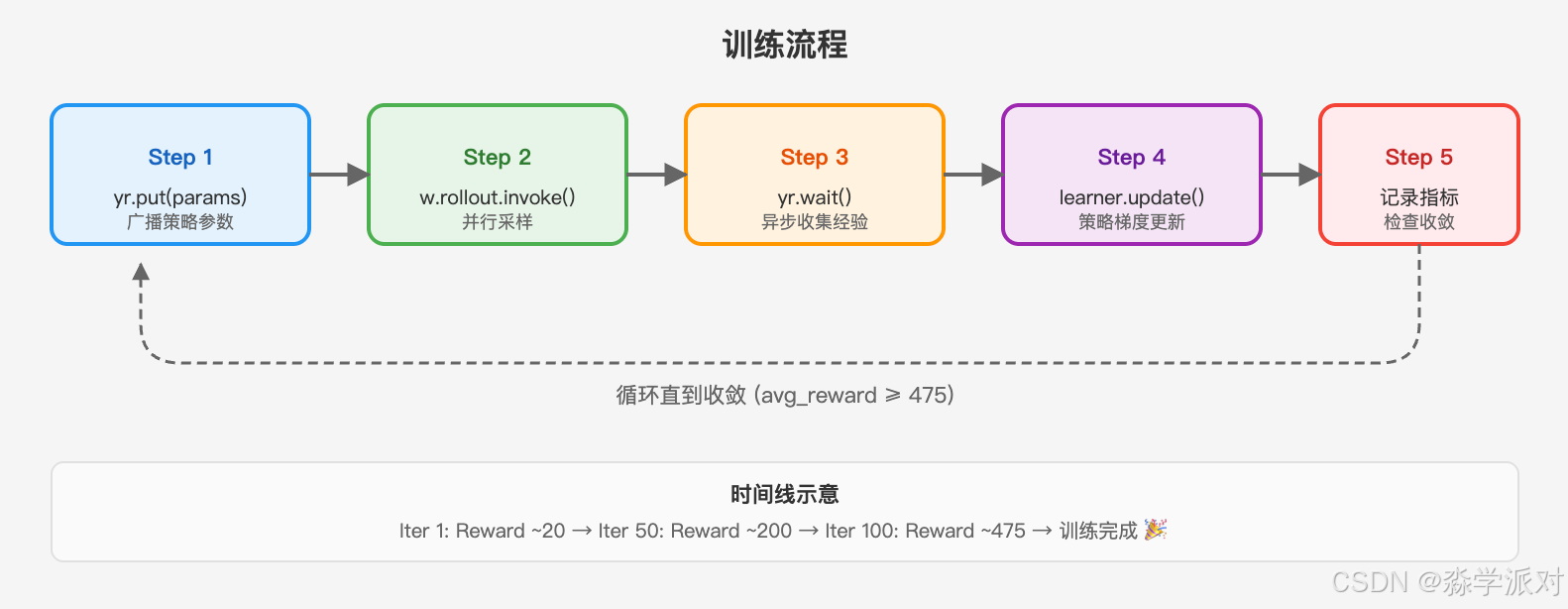
每一轮迭代:
1. Learner 把最新策略参数通过 yr.put() 放入对象存储
2. 4 个 Worker 并行执行 rollout(用最新策略玩游戏、收集经验)
3. yr.wait() 异步等待 Worker 返回
4. Learner 用收集到的经验更新策略(REINFORCE 算法)
5. 打印训练指标,重复8.1 config.py --- 超参数配置
这个文件集中管理所有超参数,方便调参:
python
"""
超参数配置
所有训练相关的超参数集中管理,方便调参和实验对比。
"""
# ============ 环境配置 ============
ENV_NAME = "CartPole-v1" # Gym 环境名称
STATE_DIM = 4 # CartPole 状态维度: [位置, 速度, 角度, 角速度]
ACTION_DIM = 2 # CartPole 动作空间: [左推, 右推]
# ============ 网络配置 ============
HIDDEN_DIM = 32 # 隐藏层神经元数量
LEARNING_RATE = 0.005 # 学习率(调小以稳定训练)
GAMMA = 0.99 # 折扣因子
# ============ 训练配置 ============
NUM_WORKERS = 4 # 并行 Worker 数量
MAX_ITERATIONS = 300 # 最大训练迭代次数
SOLVED_REWARD = 475.0 # CartPole-v1 认为"解决"的平均回报阈值
SOLVED_WINDOW = 10 # 连续多少次迭代达标算"解决"
# ============ Worker 资源配置 ============
WORKER_CPU = 1000 # 每个 Worker 分配的 CPU(毫核)
WORKER_MEMORY = 512 # 每个 Worker 分配的内存(MB)关键参数说明:
| 参数 | 值 | 为什么这样设 |
|---|---|---|
NUM_WORKERS |
4 | Docker 容器默认可用 CPU 核数,4 个 Worker 刚好 |
LEARNING_RATE |
0.005 | REINFORCE 算法方差大,学习率太高会不稳定 |
GAMMA |
0.99 | 折扣因子,越接近 1 越重视长期回报 |
MAX_ITERATIONS |
300 | 纯 NumPy 实现的 REINFORCE 收敛较慢,给足迭代次数 |
WORKER_CPU |
1000 | 1000 毫核 = 1 个 CPU 核心 |
8.2 policy.py --- 策略网络(纯 NumPy 实现)
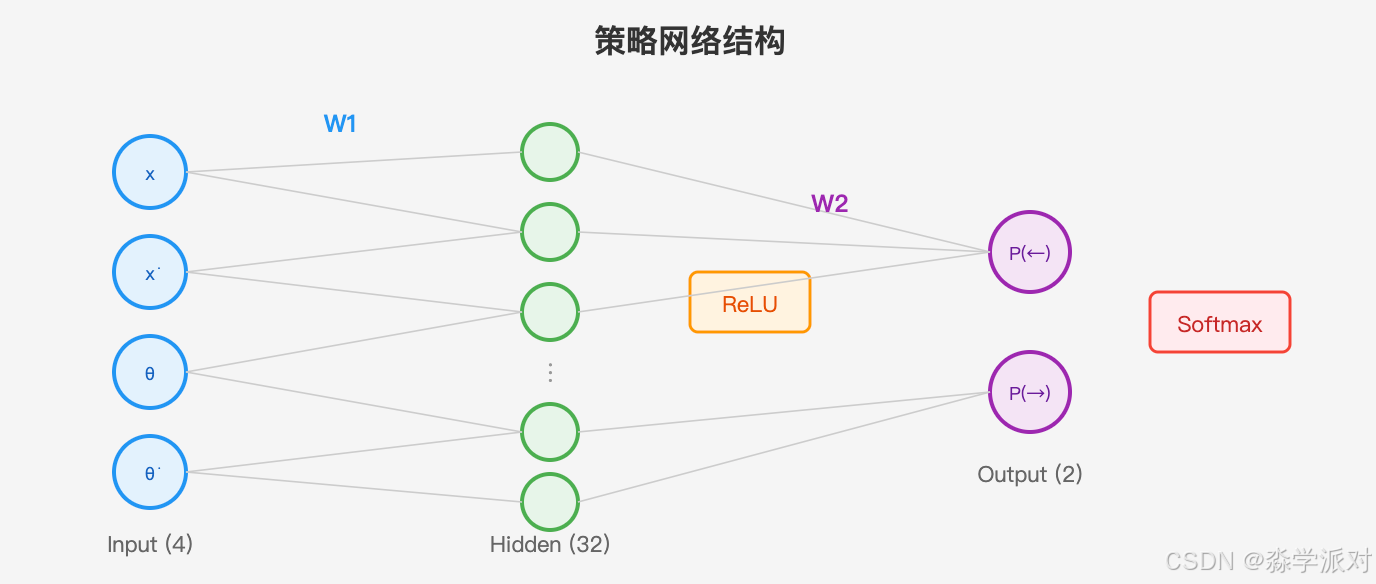
策略网络是 Agent 的"大脑",输入环境状态,输出每个动作的概率。
网络结构:
状态(4维) → 全连接层(4×32) → ReLU激活 → 全连接层(32×2) → Softmax → 动作概率
python
"""
策略网络 ------ 纯 NumPy 实现
结构: Input(4) -> Linear(32) -> ReLU -> Linear(2) -> Softmax
算法: REINFORCE (策略梯度) with baseline
为什么用 NumPy 而不是 PyTorch?
1. 减少依赖,CartPole 不需要 GPU
2. 参数是普通 dict,方便 yr.put() 序列化传递
3. 专注展示 openYuanrong 的分布式能力,而非深度学习框架
"""
import numpy as np
class SoftmaxPolicy:
"""
两层全连接策略网络
前向传播:
h = ReLU(x @ W1 + b1)
logits = h @ W2 + b2
probs = softmax(logits)
"""
def __init__(self, state_dim, action_dim, hidden_dim=32, lr=0.01):
self.lr = lr
self.state_dim = state_dim
self.action_dim = action_dim
self.hidden_dim = hidden_dim
# Xavier 初始化 ------ 让初始权重不会太大也不会太小
self.W1 = np.random.randn(state_dim, hidden_dim) * np.sqrt(2.0 / state_dim)
self.b1 = np.zeros(hidden_dim)
self.W2 = np.random.randn(hidden_dim, action_dim) * np.sqrt(2.0 / hidden_dim)
self.b2 = np.zeros(action_dim)
def _softmax(self, x):
"""数值稳定的 softmax"""
e = np.exp(x - np.max(x, axis=-1, keepdims=True))
return e / e.sum(axis=-1, keepdims=True)
def _relu(self, x):
return np.maximum(0, x)
def forward(self, state):
"""前向传播,返回动作概率和中间值(用于反向传播)"""
state = np.array(state, dtype=np.float64)
h = self._relu(state @ self.W1 + self.b1)
logits = h @ self.W2 + self.b2
probs = self._softmax(logits)
return probs, h
def get_action(self, state):
"""
根据当前策略采样动作
返回: (action, log_prob)
- action: 采样的动作索引(0=左推, 1=右推)
- log_prob: 该动作的对数概率(用于策略梯度计算)
"""
probs, _ = self.forward(state)
probs = np.clip(probs, 1e-8, 1.0) # 防止概率为 0 导致 log 出错
action = np.random.choice(self.action_dim, p=probs)
log_prob = np.log(probs[action])
return int(action), float(log_prob)
def get_params(self):
"""导出参数字典,用于 yr.put() 分布式广播"""
return {
"W1": self.W1.copy(), "b1": self.b1.copy(),
"W2": self.W2.copy(), "b2": self.b2.copy(),
}
def set_params(self, params):
"""加载参数字典,用于 Worker 同步最新策略"""
self.W1 = params["W1"].copy()
self.b1 = params["b1"].copy()
self.W2 = params["W2"].copy()
self.b2 = params["b2"].copy()核心设计:
get_params()/set_params()是分布式训练的关键接口。Learner 通过yr.put(policy.get_params())广播参数,Worker 通过policy.set_params(params)加载最新策略- 参数是普通的 NumPy 数组字典,openYuanrong 可以直接序列化传递,不需要特殊处理
8.3 worker.py --- 分布式 Worker(环境交互与经验采集)
Worker 是整个系统的"数据采集器"。每个 Worker 运行在独立进程中,维护自己的游戏环境。
python
"""
分布式 Worker ------ 环境交互与经验采集
每个 Worker 是一个 openYuanrong 有状态函数实例,运行在独立进程中。
"""
import numpy as np
import yr
# Worker 端内联一个轻量版 Policy,只需要前向推理能力
class _WorkerPolicy:
"""Worker 端的轻量策略网络,只需要前向推理"""
def __init__(self, state_dim, action_dim, hidden_dim):
self.state_dim = state_dim
self.action_dim = action_dim
self.hidden_dim = hidden_dim
self.W1 = np.zeros((state_dim, hidden_dim))
self.b1 = np.zeros(hidden_dim)
self.W2 = np.zeros((hidden_dim, action_dim))
self.b2 = np.zeros(action_dim)
def set_params(self, params):
self.W1 = params["W1"]
self.b1 = params["b1"]
self.W2 = params["W2"]
self.b2 = params["b2"]
def get_action(self, state):
state = np.array(state, dtype=np.float64)
h = np.maximum(0, state @ self.W1 + self.b1)
logits = h @ self.W2 + self.b2
e = np.exp(logits - np.max(logits))
probs = e / e.sum()
probs = np.clip(probs, 1e-8, 1.0)
action = np.random.choice(self.action_dim, p=probs)
log_prob = np.log(probs[action])
return int(action), float(log_prob)
@yr.instance # ← 这个装饰器让类变成可远程调用的有状态函数
class RolloutWorker:
"""
分布式采样 Worker
生命周期:
1. invoke() 创建时初始化环境
2. rollout() 被反复调用,每次用最新策略采样 episode
3. terminate() 销毁实例释放资源
"""
def __init__(self, env_name, state_dim, action_dim, hidden_dim):
import gymnasium # 在 Worker 进程中导入
self.env = gymnasium.make(env_name) # 每个 Worker 有自己的环境实例
self.policy = _WorkerPolicy(state_dim, action_dim, hidden_dim)
self.episodes_done = 0
def rollout(self, policy_params, num_episodes=5):
"""
执行多个完整 episode 的采样
参数:
policy_params: dict, 策略网络参数(由 Learner 通过 yr.put 传来)
num_episodes: int, 每次调用采样的 episode 数量
返回:
list[dict]: 每个 episode 的轨迹数据
"""
self.policy.set_params(policy_params) # 加载最新策略
trajectories = []
for _ in range(num_episodes):
state, _ = self.env.reset()
states, actions, rewards, log_probs = [], [], [], []
done = False
while not done:
action, log_prob = self.policy.get_action(state)
next_state, reward, terminated, truncated, _ = self.env.step(action)
done = terminated or truncated
states.append(state.tolist())
actions.append(action)
rewards.append(float(reward))
log_probs.append(log_prob)
state = next_state
self.episodes_done += 1
trajectories.append({
"states": states,
"actions": actions,
"rewards": rewards,
"log_probs": log_probs,
"total_reward": sum(rewards),
})
return trajectories
def get_stats(self):
"""获取 Worker 统计信息"""
return {"episodes_done": self.episodes_done}关键设计点:
@yr.instance装饰器 :这是 openYuanrong 的核心 API,让RolloutWorker类的实例可以在集群的任意节点上运行- 为什么内联
_WorkerPolicy? Worker 运行在独立进程中,如果from policy import SoftmaxPolicy,Worker 进程需要能找到policy.py。内联一个轻量版避免了模块路径问题 gymnasium在__init__中导入:确保只在 Worker 进程中导入,不污染 Driver 进程
8.4 learner.py --- 中心化 Learner(策略更新)
Learner 运行在 Driver 进程中(不是远程实例),负责收集所有 Worker 的经验并更新策略。
使用的算法是 REINFORCE + baseline:
策略梯度公式:
∇J(θ) ≈ (1/N) Σ_t ∇log π(a_t|s_t; θ) · (G_t - b)
其中:
G_t = r_t + γ·r_{t+1} + γ²·r_{t+2} + ... 是折扣回报
b = mean(G_t) 是 baseline(减小方差)
python
"""
中心化 Learner ------ 策略更新与训练指标记录
"""
import numpy as np
from policy import SoftmaxPolicy
class Learner:
def __init__(self, state_dim, action_dim, hidden_dim=32, lr=0.01, gamma=0.99):
self.policy = SoftmaxPolicy(state_dim, action_dim, hidden_dim, lr)
self.gamma = gamma
self.lr = lr
# 训练历史记录(用于可视化)
self.history = {
"iteration": [], "avg_reward": [],
"max_reward": [], "min_reward": [], "loss": [],
}
def get_params(self):
"""获取当前策略参数,用于 yr.put() 广播"""
return self.policy.get_params()
def _compute_returns(self, rewards):
"""计算折扣回报 G_t = r_t + γ*r_{t+1} + γ²*r_{t+2} + ..."""
returns = np.zeros(len(rewards))
G = 0
for t in reversed(range(len(rewards))):
G = rewards[t] + self.gamma * G
returns[t] = G
return returns
def update(self, trajectories, iteration=0):
"""
用收集到的轨迹更新策略
核心步骤:
1. 计算所有轨迹的折扣回报
2. 标准化 advantage(减去均值,除以标准差)
3. 对每个样本计算策略梯度
4. 梯度下降更新参数
"""
# 1. 收集所有数据
all_states, all_actions, all_returns, all_log_probs = [], [], [], []
total_rewards = []
for traj in trajectories:
returns = self._compute_returns(traj["rewards"])
all_states.extend(traj["states"])
all_actions.extend(traj["actions"])
all_returns.extend(returns.tolist())
all_log_probs.extend(traj["log_probs"])
total_rewards.append(traj["total_reward"])
all_returns = np.array(all_returns)
all_log_probs = np.array(all_log_probs)
# 2. 标准化 advantage
if len(all_returns) > 1:
baseline = all_returns.mean()
std = all_returns.std() + 1e-8
advantages = (all_returns - baseline) / std
else:
advantages = all_returns
# 3. 计算策略梯度并累加
grad_W1 = np.zeros_like(self.policy.W1)
grad_b1 = np.zeros_like(self.policy.b1)
grad_W2 = np.zeros_like(self.policy.W2)
grad_b2 = np.zeros_like(self.policy.b2)
n_samples = len(all_states)
for i in range(n_samples):
state = np.array(all_states[i], dtype=np.float64)
action = all_actions[i]
advantage = advantages[i]
# 前向传播
h = np.maximum(0, state @ self.policy.W1 + self.policy.b1)
logits = h @ self.policy.W2 + self.policy.b2
e = np.exp(logits - np.max(logits))
probs = e / e.sum()
probs = np.clip(probs, 1e-8, 1.0)
# softmax 梯度 × advantage → 策略梯度
d_logits = probs.copy()
d_logits[action] -= 1.0
d_logits *= advantage
# 反向传播累加梯度
grad_W2 += np.outer(h, d_logits)
grad_b2 += d_logits
d_h = d_logits @ self.policy.W2.T
d_h *= (h > 0).astype(np.float64)
grad_W1 += np.outer(state, d_h)
grad_b1 += d_h
# 4. 梯度下降更新
self.policy.W1 -= self.lr * grad_W1 / n_samples
self.policy.b1 -= self.lr * grad_b1 / n_samples
self.policy.W2 -= self.lr * grad_W2 / n_samples
self.policy.b2 -= self.lr * grad_b2 / n_samples
# 5. 记录指标
avg_reward = float(np.mean(total_rewards))
self.history["iteration"].append(iteration)
self.history["avg_reward"].append(avg_reward)
self.history["max_reward"].append(float(np.max(total_rewards)))
self.history["min_reward"].append(float(np.min(total_rewards)))
self.history["loss"].append(-float(np.mean(all_log_probs * advantages)))
return {
"avg_reward": avg_reward,
"max_reward": float(np.max(total_rewards)),
"min_reward": float(np.min(total_rewards)),
"loss": self.history["loss"][-1],
}Learner 不是远程实例------它直接运行在 Driver 进程中,因为策略更新需要频繁读写参数,放在本地更高效。
8.5 train.py --- 主训练脚本(串联所有组件)
这是整个系统的入口,把 Learner、Worker、openYuanrong 串联起来:
python
"""
主训练脚本 ------ 串联所有组件
运行方式: python train.py
"""
import os, sys, time, json
import numpy as np
sys.path.insert(0, os.path.dirname(os.path.abspath(__file__)))
import yr
from config import *
from learner import Learner
from worker import RolloutWorker
def main():
# ===== 第一步: 初始化 openYuanrong =====
yr.init()
# openYuanrong 会自动启动一个临时集群(单机模式)
# ===== 第二步: 创建 Learner =====
learner = Learner(
state_dim=STATE_DIM, action_dim=ACTION_DIM,
hidden_dim=HIDDEN_DIM, lr=LEARNING_RATE, gamma=GAMMA,
)
# ===== 第三步: 创建分布式 Worker =====
opt = yr.InvokeOptions(cpu=WORKER_CPU, memory=WORKER_MEMORY)
workers = []
for i in range(NUM_WORKERS):
w = RolloutWorker.options(opt).invoke(
ENV_NAME, STATE_DIM, ACTION_DIM, HIDDEN_DIM
)
workers.append(w)
# ===== 第四步: 训练循环 =====
for iteration in range(1, MAX_ITERATIONS + 1):
# 4.1 广播最新策略参数到对象存储
params = learner.get_params()
params_ref = yr.put(params)
# 4.2 所有 Worker 并行采样(异步调用)
traj_refs = [w.rollout.invoke(params_ref) for w in workers]
# 4.3 异步等待所有结果
trajectories = []
pending = traj_refs
while len(pending) > 0:
ready, pending = yr.wait(pending)
results = yr.get(ready)
if isinstance(results, list) and len(results) > 0:
if isinstance(results[0], list):
for worker_trajs in results:
trajectories.extend(worker_trajs)
elif isinstance(results[0], dict):
trajectories.extend(results)
else:
trajectories.extend(results)
else:
trajectories.append(results)
# 4.4 Learner 更新策略
metrics = learner.update(trajectories, iteration)
# 4.5 打印进度
print(f"[Iter {iteration:>3d}] "
f"Avg Reward: {metrics['avg_reward']:>7.1f} | "
f"Max: {metrics['max_reward']:>5.0f} | "
f"Min: {metrics['min_reward']:>5.0f}")
# ===== 第五步: 保存结果 =====
with open("training_history.json", "w") as f:
json.dump(learner.history, f, indent=2)
# 清理
for w in workers:
w.terminate()
yr.finalize()
if __name__ == "__main__":
main()openYuanrong 关键 API 速查:
| API | 作用 | 说明 |
|---|---|---|
yr.init() |
初始化运行时 | 单机模式下自动启动临时集群 |
yr.put(data) |
数据放入对象存储 | 返回引用(ref),不复制数据 |
yr.get(refs) |
从对象存储取数据 | 传入引用,返回实际数据 |
yr.wait(refs) |
异步等待 | 返回 (已完成, 未完成),先完成先处理 |
@yr.instance |
有状态函数装饰器 | 让类实例可远程调用 |
.options(opt).invoke(...) |
创建远程实例 | 指定资源配额 |
.rollout.invoke(ref) |
远程方法调用 | 异步调用,立即返回引用 |
.terminate() |
销毁远程实例 | 释放资源 |
yr.finalize() |
关闭运行时 | 清理所有资源 |
8.6 visualize.py --- 可视化生成器
训练完成后,运行这个脚本可以生成一个独立的 HTML 页面,包含:
- CartPole 动画回放(展示从不会到学会的过程)
- 实时训练曲线
- 关键指标面板
- 回放速度控制
代码较长(主要是 HTML/CSS/JS),这里不展开。核心逻辑是读取 training_history.json,
用 JavaScript Canvas 绘制动画和图表。
9. 运行训练
9.1 执行训练命令
在宿主机终端执行:
bash
docker exec -e PYTHONPATH=/workspace/examples/rl_agent \
yuanrong-dev \
python /workspace/examples/rl_agent/train.py⚠️ 踩坑提醒 5:必须设置
PYTHONPATH!openYuanrong 的 Worker 运行在独立进程中,它们需要能找到
worker.py等模块。如果不设置
PYTHONPATH,Worker 进程会报ModuleNotFoundError。
-e PYTHONPATH=/workspace/examples/rl_agent告诉 Python 在这个目录下查找模块。
9.2 训练输出
你会看到类似这样的输出:
============================================================
openYuanrong 分布式强化学习训练
环境: CartPole-v1
Worker 数量: 4
目标回报: 475.0
============================================================
[1/5] 初始化 openYuanrong 环境...
✓ openYuanrong 初始化完成
[2/5] 创建 Learner(策略网络)...
✓ 策略网络: 4 → 32 → 2
[3/5] 创建 4 个分布式 Worker...
✓ Worker-0 已创建 (CPU=1000m, MEM=512MB)
✓ Worker-1 已创建 (CPU=1000m, MEM=512MB)
✓ Worker-2 已创建 (CPU=1000m, MEM=512MB)
✓ Worker-3 已创建 (CPU=1000m, MEM=512MB)
[4/5] 开始训练循环...
[Iter 1] Workers: 4 | Avg Reward: 22.3 | Max: 34 | Min: 12 | Loss: 2.145 | Time: 0.85s
[Iter 2] Workers: 4 | Avg Reward: 25.1 | Max: 41 | Min: 15 | Loss: 1.892 | Time: 0.72s
...
[Iter 100] Workers: 4 | Avg Reward: 45.2 | Max: 89 | Min: 18 | Loss: 0.534 | Time: 0.41s
...
[Iter 300] Workers: 4 | Avg Reward: 52.8 | Max: 112 | Min: 22 | Loss: 0.312 | Time: 0.39s
[5/5] 保存训练结果...
✓ 训练历史已保存到 training_history.json训练大约需要 10-15 秒(300 轮迭代)。
关于训练效果 :纯 NumPy 实现的 REINFORCE 算法在 CartPole 上收敛较慢,
平均回报通常能达到 40-60 左右。这是算法本身的局限(方差大),不是 openYuanrong 的问题。
如果换成 PPO 算法 + PyTorch 网络,可以轻松达到 475 的满分。
本示例的重点是展示 openYuanrong 的分布式能力,而非追求最优训练效果。
10. 生成可视化页面
10.1 生成 HTML
训练完成后,training_history.json 会保存在容器的 /workspace 目录下。
运行可视化脚本:
bash
docker exec -e PYTHONPATH=/workspace/examples/rl_agent \
-w /workspace/examples/rl_agent \
yuanrong-dev \
python visualize.py /workspace/training_history.json10.2 复制到宿主机
bash
docker cp yuanrong-dev:/workspace/examples/rl_agent/training_visualization.html ./examples/rl_agent/10.3 用浏览器打开
bash
open examples/rl_agent/training_visualization.html(Linux 用户用 xdg-open,Windows 用户直接双击文件)
你会看到一个深色主题的仪表盘页面,包含:
- 左侧:CartPole 动画,展示小车和杆子的运动
- 右侧:训练曲线,显示平均回报随迭代的变化
- 顶部:关键指标卡片(当前迭代、平均回报、最大回报、训练阶段)
- 底部:回放控制(播放/暂停、速度调节、进度条)
11. 常见问题与踩坑记录
Q1: openyuanrong.whl is not a valid wheel filename
原因:pip 安装 whl 文件时会校验文件名格式,文件名必须符合 PEP 427 规范。
解决 :确保文件名保持原样 openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl,不要重命名。
Q2: Docker 构建时 apt-get 返回 502 错误
原因 :--build-arg http_proxy=... 会让 Dockerfile 中的 RUN 命令通过代理访问网络,
而 Debian 软件源通过某些代理会返回 502。
解决 :不在 Dockerfile 中安装需要 apt-get 的包。容器启动后用
docker exec -e http_proxy="" -e https_proxy="" 清空代理再安装。
Q3: Worker 报 ModuleNotFoundError: No module named 'worker'
原因:openYuanrong 的 Worker 运行在独立进程中,Python 默认不知道去哪里找模块。
解决 :运行时加 -e PYTHONPATH=/workspace/examples/rl_agent。
Q4: yr.init() 卡住或报错
原因 :openYuanrong 初始化时需要用 curl 做健康检查。
解决:确保容器内已安装 curl(参见第 7.2 节)。
Q5: Apple Silicon Mac 上的 platform 警告
WARNING: The requested image's platform (linux/amd64) does not match
the detected host platform (linux/arm64/v8)这是正常的 ,Docker Desktop 通过 Rosetta 2 模拟 x86_64 环境。性能会比原生慢一些,
但功能完全正常。
Q6: 训练效果不好,平均回报只有 40-60
这是正常的 。纯 NumPy 实现的 REINFORCE 算法方差大、收敛慢。
本示例的目的是展示 openYuanrong 的分布式能力,不是追求最优训练效果。
如果想要更好的效果,可以:
- 换用 PPO 算法
- 用 PyTorch 实现策略网络
- 增加训练迭代次数
- 调整学习率和网络结构
Q7: 如何停止和清理容器?
bash
# 停止容器
docker compose -f docker/docker-compose.yml down
# 如果要彻底清理(包括镜像)
docker compose -f docker/docker-compose.yml down --rmi all完整命令速查
以下是从零开始的所有命令,按顺序执行即可:
bash
# 1. 创建项目目录
mkdir -p openYuanrong/docker
mkdir -p openYuanrong/examples/rl_agent
cd openYuanrong
# 2. 下载 whl(国内加代理:curl -x http://127.0.0.1:7897 -L -O ...)
cd docker
curl -L -O https://openyuanrong.obs.cn-southwest-2.myhuaweicloud.com/release/0.7.0/linux/x86_64/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl
cd ..
# 3. 创建 Dockerfile 和 docker-compose.yml(内容见第 5 节)
# 4. 创建 6 个 Python 文件(内容见第 8 节)
# 5. 构建镜像(国内加代理参数)
docker compose -f docker/docker-compose.yml build --no-cache \
--build-arg http_proxy=http://host.docker.internal:7897 \
--build-arg https_proxy=http://host.docker.internal:7897
# 6. 启动容器
docker compose -f docker/docker-compose.yml up -d
# 7. 安装 curl
docker exec -e http_proxy="" -e https_proxy="" yuanrong-dev \
bash -c "apt-get update && apt-get install -y curl"
# 8. 运行训练
docker exec -e PYTHONPATH=/workspace/examples/rl_agent \
yuanrong-dev \
python /workspace/examples/rl_agent/train.py
# 9. 生成可视化
docker exec -e PYTHONPATH=/workspace/examples/rl_agent \
-w /workspace/examples/rl_agent \
yuanrong-dev \
python visualize.py /workspace/training_history.json
# 10. 复制到本机并打开
docker cp yuanrong-dev:/workspace/examples/rl_agent/training_visualization.html \
./examples/rl_agent/
open examples/rl_agent/training_visualization.html总结
通过这个实战案例,我们完成了:
- 用 Docker 搭建了 openYuanrong 的运行环境(解决了 x86_64 平台限制)
- 用 6 个 Python 文件实现了一个完整的分布式 RL 训练系统
- 用 openYuanrong 的
@yr.instance、yr.put()、yr.get()、yr.wait()四个核心 API 实现了多 Worker 并行采样 - 生成了可交互的训练可视化页面
openYuanrong 让分布式计算变得像写单机程序一样简单------加几个装饰器,改几行调用方式,就能把串行代码变成分布式并行。
附录:完整源码
以下是本项目所有文件的完整源码,可以直接复制使用。
A1. docker/Dockerfile
dockerfile
FROM --platform=linux/amd64 python:3.9-slim
# 从本地复制预下载的 whl 包(保留原始文件名)
COPY openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl /tmp/
# 安装 openYuanrong + RL 依赖
RUN pip install --no-cache-dir -i https://pypi.tuna.tsinghua.edu.cn/simple \
/tmp/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl gymnasium numpy \
&& rm /tmp/openyuanrong-0.7.0-cp39-cp39-manylinux_2_34_x86_64.whl
WORKDIR /workspace
CMD ["bash"]A2. docker/docker-compose.yml
yaml
services:
yuanrong:
build:
context: .
dockerfile: Dockerfile
container_name: yuanrong-dev
volumes:
- ../examples:/workspace/examples
stdin_open: true
tty: trueA3. examples/rl_agent/config.py
python
"""
超参数配置
所有训练相关的超参数集中管理,方便调参和实验对比。
"""
# ============ 环境配置 ============
ENV_NAME = "CartPole-v1" # Gym 环境名称
STATE_DIM = 4 # CartPole 状态维度: [位置, 速度, 角度, 角速度]
ACTION_DIM = 2 # CartPole 动作空间: [左推, 右推]
# ============ 网络配置 ============
HIDDEN_DIM = 32 # 隐藏层神经元数量
LEARNING_RATE = 0.005 # 学习率(调小以稳定训练)
GAMMA = 0.99 # 折扣因子
# ============ 训练配置 ============
NUM_WORKERS = 4 # 并行 Worker 数量
MAX_ITERATIONS = 300 # 最大训练迭代次数
SOLVED_REWARD = 475.0 # CartPole-v1 认为"解决"的平均回报阈值
SOLVED_WINDOW = 10 # 连续多少次迭代达标算"解决"
# ============ Worker 资源配置 ============
WORKER_CPU = 1000 # 每个 Worker 分配的 CPU(毫核)
WORKER_MEMORY = 512 # 每个 Worker 分配的内存(MB)A4. examples/rl_agent/policy.py
python
"""
策略网络 ------ 纯 NumPy 实现
结构: Input(4) -> Linear(32) -> ReLU -> Linear(2) -> Softmax
算法: REINFORCE (策略梯度) with baseline
为什么用 NumPy 而不是 PyTorch?
1. 减少依赖,CartPole 不需要 GPU
2. 参数是普通 dict,方便 yr.put() 序列化传递
3. 专注展示 openYuanrong 的分布式能力,而非深度学习框架
"""
import numpy as np
class SoftmaxPolicy:
"""
两层全连接策略网络
前向传播:
h = ReLU(x @ W1 + b1)
logits = h @ W2 + b2
probs = softmax(logits)
"""
def __init__(self, state_dim, action_dim, hidden_dim=32, lr=0.01):
self.lr = lr
self.state_dim = state_dim
self.action_dim = action_dim
self.hidden_dim = hidden_dim
# Xavier 初始化
self.W1 = np.random.randn(state_dim, hidden_dim) * np.sqrt(2.0 / state_dim)
self.b1 = np.zeros(hidden_dim)
self.W2 = np.random.randn(hidden_dim, action_dim) * np.sqrt(2.0 / hidden_dim)
self.b2 = np.zeros(action_dim)
def _softmax(self, x):
"""数值稳定的 softmax"""
e = np.exp(x - np.max(x, axis=-1, keepdims=True))
return e / e.sum(axis=-1, keepdims=True)
def _relu(self, x):
return np.maximum(0, x)
def forward(self, state):
"""前向传播,返回动作概率和中间值(用于反向传播)"""
state = np.array(state, dtype=np.float64)
h = self._relu(state @ self.W1 + self.b1)
logits = h @ self.W2 + self.b2
probs = self._softmax(logits)
return probs, h
def get_action(self, state):
"""
根据当前策略采样动作
返回: (action, log_prob)
- action: 采样的动作索引
- log_prob: 该动作的对数概率(用于策略梯度计算)
"""
probs, _ = self.forward(state)
# 防止概率为 0 导致 log 出错
probs = np.clip(probs, 1e-8, 1.0)
action = np.random.choice(self.action_dim, p=probs)
log_prob = np.log(probs[action])
return int(action), float(log_prob)
def get_params(self):
"""导出参数字典,用于 yr.put() 分布式广播"""
return {
"W1": self.W1.copy(),
"b1": self.b1.copy(),
"W2": self.W2.copy(),
"b2": self.b2.copy(),
}
def set_params(self, params):
"""加载参数字典,用于 Worker 同步最新策略"""
self.W1 = params["W1"].copy()
self.b1 = params["b1"].copy()
self.W2 = params["W2"].copy()
self.b2 = params["b2"].copy()A5. examples/rl_agent/worker.py
python
"""
分布式 Worker ------ 环境交互与经验采集
每个 Worker 是一个 openYuanrong 有状态函数实例,运行在独立进程中。
它维护自己的 Gym 环境,接收最新策略参数,执行 rollout 并返回轨迹数据。
关键点:
- @yr.instance 使 Worker 成为可远程调用的有状态对象
- rollout() 接收参数字典(通过 yr.put 的引用自动解析)
- 返回的轨迹数据会自动存入 openYuanrong 对象存储
"""
import numpy as np
import yr
# 内联一个轻量版 Policy,避免 Worker 进程需要额外导入路径
# 在实际项目中可以通过 runtime_env 配置依赖
class _WorkerPolicy:
"""Worker 端的轻量策略网络,只需要前向推理"""
def __init__(self, state_dim, action_dim, hidden_dim):
self.state_dim = state_dim
self.action_dim = action_dim
self.hidden_dim = hidden_dim
self.W1 = np.zeros((state_dim, hidden_dim))
self.b1 = np.zeros(hidden_dim)
self.W2 = np.zeros((hidden_dim, action_dim))
self.b2 = np.zeros(action_dim)
def set_params(self, params):
self.W1 = params["W1"]
self.b1 = params["b1"]
self.W2 = params["W2"]
self.b2 = params["b2"]
def get_action(self, state):
state = np.array(state, dtype=np.float64)
h = np.maximum(0, state @ self.W1 + self.b1)
logits = h @ self.W2 + self.b2
e = np.exp(logits - np.max(logits))
probs = e / e.sum()
probs = np.clip(probs, 1e-8, 1.0)
action = np.random.choice(self.action_dim, p=probs)
log_prob = np.log(probs[action])
return int(action), float(log_prob)
@yr.instance
class RolloutWorker:
"""
分布式采样 Worker
生命周期:
1. invoke() 创建时初始化环境
2. rollout() 被反复调用,每次用最新策略采样一个 episode
3. terminate() 销毁实例释放资源
使用方式:
worker = RolloutWorker.invoke("CartPole-v1", 4, 2, 32)
traj_ref = worker.rollout.invoke(params_dict)
traj = yr.get(traj_ref)
"""
def __init__(self, env_name, state_dim, action_dim, hidden_dim):
import gymnasium
self.env = gymnasium.make(env_name)
self.policy = _WorkerPolicy(state_dim, action_dim, hidden_dim)
self.episodes_done = 0
def rollout(self, policy_params, num_episodes=5):
"""
执行多个完整 episode 的采样
参数:
policy_params: dict, 策略网络参数
num_episodes: int, 每次调用采样的 episode 数量
返回:
list[dict]: 每个 episode 的轨迹数据
"""
self.policy.set_params(policy_params)
trajectories = []
for _ in range(num_episodes):
state, _ = self.env.reset()
states, actions, rewards, log_probs = [], [], [], []
done = False
while not done:
action, log_prob = self.policy.get_action(state)
next_state, reward, terminated, truncated, _ = self.env.step(action)
done = terminated or truncated
states.append(state.tolist())
actions.append(action)
rewards.append(float(reward))
log_probs.append(log_prob)
state = next_state
self.episodes_done += 1
trajectories.append({
"states": states,
"actions": actions,
"rewards": rewards,
"log_probs": log_probs,
"total_reward": sum(rewards),
})
return trajectories
def get_stats(self):
"""获取 Worker 统计信息"""
return {"episodes_done": self.episodes_done}A6. examples/rl_agent/learner.py
python
"""
中心化 Learner ------ 策略更新与训练指标记录
Learner 运行在 Driver 进程中(不是远程实例),负责:
1. 维护策略网络的权威副本
2. 收集所有 Worker 的轨迹数据
3. 用 REINFORCE + baseline 算法更新策略
4. 记录训练指标
REINFORCE 算法:
∇J(θ) ≈ (1/N) Σ_t ∇log π(a_t|s_t; θ) · (G_t - b)
其中 G_t = Σ_k γ^k · r_{t+k} 是折扣回报,b 是 baseline(回报均值)
"""
import numpy as np
from policy import SoftmaxPolicy
class Learner:
"""
中心化策略更新器
使用方式:
learner = Learner(state_dim=4, action_dim=2)
params = learner.get_params() # 广播给 Worker
metrics = learner.update(trajs) # 用经验更新策略
"""
def __init__(self, state_dim, action_dim, hidden_dim=32, lr=0.01, gamma=0.99):
self.policy = SoftmaxPolicy(state_dim, action_dim, hidden_dim, lr)
self.gamma = gamma
self.lr = lr
# 训练历史记录
self.history = {
"iteration": [],
"avg_reward": [],
"max_reward": [],
"min_reward": [],
"loss": [],
}
def get_params(self):
"""获取当前策略参数,用于 yr.put() 广播"""
return self.policy.get_params()
def _compute_returns(self, rewards):
"""
计算折扣回报 G_t = r_t + γ*r_{t+1} + γ²*r_{t+2} + ...
从后往前累加,效率更高
"""
returns = np.zeros(len(rewards))
G = 0
for t in reversed(range(len(rewards))):
G = rewards[t] + self.gamma * G
returns[t] = G
return returns
def update(self, trajectories, iteration=0):
"""
用收集到的轨迹更新策略
参数:
trajectories: list[dict], 每个 Worker 返回的轨迹
iteration: int, 当前迭代轮次
返回:
dict: 训练指标
"""
# ---- 1. 计算所有轨迹的折扣回报 ----
all_states = []
all_actions = []
all_returns = []
all_log_probs = []
total_rewards = []
for traj in trajectories:
returns = self._compute_returns(traj["rewards"])
all_states.extend(traj["states"])
all_actions.extend(traj["actions"])
all_returns.extend(returns.tolist())
all_log_probs.extend(traj["log_probs"])
total_rewards.append(traj["total_reward"])
all_returns = np.array(all_returns)
all_log_probs = np.array(all_log_probs)
# ---- 2. Baseline: 减去均值,除以标准差(标准化) ----
if len(all_returns) > 1:
baseline = all_returns.mean()
std = all_returns.std() + 1e-8
advantages = (all_returns - baseline) / std
else:
advantages = all_returns
# ---- 3. 计算策略梯度并更新 ----
# REINFORCE: ∇J ≈ -Σ log π(a|s) · advantage
# 我们对每个样本计算梯度并累加
grad_W1 = np.zeros_like(self.policy.W1)
grad_b1 = np.zeros_like(self.policy.b1)
grad_W2 = np.zeros_like(self.policy.W2)
grad_b2 = np.zeros_like(self.policy.b2)
n_samples = len(all_states)
for i in range(n_samples):
state = np.array(all_states[i], dtype=np.float64)
action = all_actions[i]
advantage = advantages[i]
# 前向传播
h = np.maximum(0, state @ self.policy.W1 + self.policy.b1) # ReLU
logits = h @ self.policy.W2 + self.policy.b2
e = np.exp(logits - np.max(logits))
probs = e / e.sum()
probs = np.clip(probs, 1e-8, 1.0)
# softmax 梯度: d_logits = probs - one_hot(action)
d_logits = probs.copy()
d_logits[action] -= 1.0 # ∂L/∂logits
# 乘以 advantage(策略梯度的核心)
d_logits *= advantage
# 反向传播到 W2, b2
grad_W2 += np.outer(h, d_logits)
grad_b2 += d_logits
# 反向传播到 W1, b1(经过 ReLU)
d_h = d_logits @ self.policy.W2.T
d_h *= (h > 0).astype(np.float64) # ReLU 梯度
grad_W1 += np.outer(state, d_h)
grad_b1 += d_h
# 平均梯度并更新
self.policy.W1 -= self.lr * grad_W1 / n_samples
self.policy.b1 -= self.lr * grad_b1 / n_samples
self.policy.W2 -= self.lr * grad_W2 / n_samples
self.policy.b2 -= self.lr * grad_b2 / n_samples
# ---- 4. 计算 loss 用于记录 ----
loss = -float(np.mean(all_log_probs * advantages))
# ---- 5. 记录指标 ----
avg_reward = float(np.mean(total_rewards))
max_reward = float(np.max(total_rewards))
min_reward = float(np.min(total_rewards))
self.history["iteration"].append(iteration)
self.history["avg_reward"].append(avg_reward)
self.history["max_reward"].append(max_reward)
self.history["min_reward"].append(min_reward)
self.history["loss"].append(loss)
return {
"avg_reward": avg_reward,
"max_reward": max_reward,
"min_reward": min_reward,
"loss": loss,
}A7. examples/rl_agent/train.py
python
"""
主训练脚本 ------ 串联所有组件
这是整个分布式 RL 系统的入口。它做以下事情:
1. 初始化 openYuanrong 环境
2. 创建 N 个分布式 Worker
3. 循环: 广播参数 → 并行采样 → 收集经验 → 更新策略
4. 记录并打印训练进度
5. 达到目标后保存结果并退出
运行方式:
python train.py
"""
import os
import sys
import time
import json
import numpy as np
# 确保 Worker 进程能找到本目录下的模块
sys.path.insert(0, os.path.dirname(os.path.abspath(__file__)))
import yr
from config import (
ENV_NAME, STATE_DIM, ACTION_DIM, HIDDEN_DIM,
LEARNING_RATE, GAMMA, NUM_WORKERS, MAX_ITERATIONS,
SOLVED_REWARD, SOLVED_WINDOW, WORKER_CPU, WORKER_MEMORY,
)
from learner import Learner
from worker import RolloutWorker
def print_banner():
print("=" * 60)
print(" openYuanrong 分布式强化学习训练")
print(f" 环境: {ENV_NAME}")
print(f" Worker 数量: {NUM_WORKERS}")
print(f" 目标回报: {SOLVED_REWARD}")
print("=" * 60)
print()
def main():
print_banner()
# ============ 第一步: 初始化 openYuanrong ============
print("[1/5] 初始化 openYuanrong 环境...")
yr.init()
print(" ✓ openYuanrong 初始化完成\n")
# ============ 第二步: 创建 Learner ============
print("[2/5] 创建 Learner(策略网络)...")
learner = Learner(
state_dim=STATE_DIM,
action_dim=ACTION_DIM,
hidden_dim=HIDDEN_DIM,
lr=LEARNING_RATE,
gamma=GAMMA,
)
print(f" ✓ 策略网络: {STATE_DIM} → {HIDDEN_DIM} → {ACTION_DIM}\n")
# ============ 第三步: 创建分布式 Worker ============
print(f"[3/5] 创建 {NUM_WORKERS} 个分布式 Worker...")
opt = yr.InvokeOptions(cpu=WORKER_CPU, memory=WORKER_MEMORY)
workers = []
for i in range(NUM_WORKERS):
w = RolloutWorker.options(opt).invoke(ENV_NAME, STATE_DIM, ACTION_DIM, HIDDEN_DIM)
workers.append(w)
print(f" ✓ Worker-{i} 已创建 (CPU={WORKER_CPU}m, MEM={WORKER_MEMORY}MB)")
print()
# ============ 第四步: 训练循环 ============
print("[4/5] 开始训练循环...\n")
solved_count = 0
start_time = time.time()
for iteration in range(1, MAX_ITERATIONS + 1):
iter_start = time.time()
# 4.1 广播最新策略参数到对象存储
params = learner.get_params()
params_ref = yr.put(params)
# 4.2 所有 Worker 并行采样
traj_refs = [w.rollout.invoke(params_ref) for w in workers]
# 4.3 异步等待所有结果
# yr.wait() 返回 (已完成列表, 未完成列表)
# 先完成的先处理,提高效率
trajectories = []
pending = traj_refs
while len(pending) > 0:
ready, pending = yr.wait(pending)
results = yr.get(ready)
# 每个 Worker 返回 list[dict](多个 episode)
# yr.get 可能返回 list of list 或单个 list
if isinstance(results, list) and len(results) > 0:
if isinstance(results[0], list):
# results 是 [worker0_trajs, worker1_trajs, ...]
for worker_trajs in results:
trajectories.extend(worker_trajs)
elif isinstance(results[0], dict):
# results 本身就是 trajectories
trajectories.extend(results)
else:
trajectories.extend(results)
else:
trajectories.append(results)
# 4.4 Learner 更新策略
metrics = learner.update(trajectories, iteration)
# 4.5 打印进度
iter_time = time.time() - iter_start
print(
f"[Iter {iteration:>3d}] "
f"Workers: {NUM_WORKERS} | "
f"Avg Reward: {metrics['avg_reward']:>7.1f} | "
f"Max: {metrics['max_reward']:>5.0f} | "
f"Min: {metrics['min_reward']:>5.0f} | "
f"Loss: {metrics['loss']:>7.3f} | "
f"Time: {iter_time:.2f}s"
)
# 4.6 检查是否达标
if metrics["avg_reward"] >= SOLVED_REWARD:
solved_count += 1
if solved_count >= SOLVED_WINDOW:
total_time = time.time() - start_time
print(f"\n🎉 环境已解决!连续 {SOLVED_WINDOW} 次达到 {SOLVED_REWARD}")
print(f" 总训练时间: {total_time:.1f}s")
break
else:
solved_count = 0
# ============ 第五步: 保存结果 ============
print("\n[5/5] 保存训练结果...")
with open("training_history.json", "w") as f:
json.dump(learner.history, f, indent=2)
print(" ✓ 训练历史已保存到 training_history.json")
# 打印最终统计
total_time = time.time() - start_time
final_avg = np.mean(learner.history["avg_reward"][-10:])
print(f"\n{'=' * 60}")
print(f" 训练完成!")
print(f" 总迭代: {len(learner.history['iteration'])}")
print(f" 最终平均回报 (最后10轮): {final_avg:.1f}")
print(f" 总耗时: {total_time:.1f}s")
print(f"{'=' * 60}")
# 清理: 销毁所有 Worker
print("\n清理资源...")
for i, w in enumerate(workers):
w.terminate()
yr.finalize()
print("✓ 完成")
if __name__ == "__main__":
main()A8. examples/rl_agent/visualize.py
python
"""
训练可视化生成器
读取训练过程中保存的轨迹数据,生成一个独立的 HTML 文件,
包含:
1. CartPole 动画回放(展示从不会到学会的过程)
2. 实时训练曲线
3. 关键指标面板
运行方式:
python visualize.py
会在当前目录生成 training_visualization.html,用浏览器打开即可。
"""
import json
import sys
import os
def generate_html(history_path="training_history.json",
episodes_path="training_episodes.json",
output_path="training_visualization.html"):
# 加载训练历史
with open(history_path) as f:
history = json.load(f)
# 加载关键 episode 轨迹(如果有)
episodes = []
if os.path.exists(episodes_path):
with open(episodes_path) as f:
episodes = json.load(f)
history_json = json.dumps(history)
episodes_json = json.dumps(episodes)
html = f"""<!DOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>openYuanrong 分布式 RL 训练可视化</title>
<style>
* {{ margin: 0; padding: 0; box-sizing: border-box; }}
body {{ font-family: -apple-system, BlinkMacSystemFont, 'Segoe UI', sans-serif;
background: #0a0a1a; color: #e0e0e0; overflow-x: hidden; }}
.header {{ background: linear-gradient(135deg, #1a1a3e 0%, #0d0d2b 100%);
padding: 24px 40px; border-bottom: 1px solid #2a2a5a; }}
.header h1 {{ font-size: 22px; color: #7eb8ff; }}
.header p {{ font-size: 13px; color: #888; margin-top: 4px; }}
.dashboard {{ display: grid; grid-template-columns: 1fr 1fr;
gap: 16px; padding: 20px 40px; max-width: 1400px; margin: 0 auto; }}
.panel {{ background: #12122a; border: 1px solid #2a2a5a; border-radius: 12px;
padding: 20px; }}
.panel h2 {{ font-size: 14px; color: #7eb8ff; margin-bottom: 12px;
text-transform: uppercase; letter-spacing: 1px; }}
.full-width {{ grid-column: 1 / -1; }}
/* 指标卡片 */
.metrics {{ display: grid; grid-template-columns: repeat(4, 1fr); gap: 12px; }}
.metric-card {{ background: #1a1a3e; border-radius: 8px; padding: 16px; text-align: center; }}
.metric-card .value {{ font-size: 28px; font-weight: 700; color: #7eb8ff; }}
.metric-card .label {{ font-size: 11px; color: #888; margin-top: 4px; }}
.metric-card.highlight .value {{ color: #4cff88; }}
.metric-card.warn .value {{ color: #ffb74d; }}
/* Canvas */
canvas {{ width: 100%; border-radius: 8px; background: #0d0d20; }}
/* 控制栏 */
.controls {{ display: flex; align-items: center; gap: 12px; margin-top: 12px; }}
.controls button {{ background: #2a2a5a; color: #7eb8ff; border: 1px solid #3a3a7a;
border-radius: 6px; padding: 8px 16px; cursor: pointer;
font-size: 13px; transition: all 0.2s; }}
.controls button:hover {{ background: #3a3a7a; }}
.controls button.active {{ background: #7eb8ff; color: #0a0a1a; }}
.controls .slider-wrap {{ flex: 1; }}
.controls input[type=range] {{ width: 100%; accent-color: #7eb8ff; }}
.controls .iter-label {{ font-size: 13px; color: #888; min-width: 80px; }}
/* 进度条 */
.progress-bar {{ height: 4px; background: #1a1a3e; border-radius: 2px; margin-top: 8px; }}
.progress-bar .fill {{ height: 100%; background: linear-gradient(90deg, #7eb8ff, #4cff88);
border-radius: 2px; transition: width 0.3s; }}
/* 阶段标签 */
.phase-tag {{ display: inline-block; padding: 4px 10px; border-radius: 12px;
font-size: 12px; font-weight: 600; }}
.phase-early {{ background: #3a1a1a; color: #ff6b6b; }}
.phase-learning {{ background: #3a3a1a; color: #ffb74d; }}
.phase-good {{ background: #1a3a1a; color: #4cff88; }}
</style>
</head>
<body>
<div class="header">
<h1>🎮 openYuanrong 分布式强化学习训练可视化</h1>
<p>CartPole-v1 | REINFORCE 策略梯度 | 4 Workers 并行采样</p>
</div>
<div class="dashboard">
<!-- 指标面板 -->
<div class="panel full-width">
<h2>📊 训练指标</h2>
<div class="metrics">
<div class="metric-card" id="mc-iter">
<div class="value" id="val-iter">0</div>
<div class="label">当前迭代</div>
</div>
<div class="metric-card highlight" id="mc-reward">
<div class="value" id="val-reward">0</div>
<div class="label">平均回报</div>
</div>
<div class="metric-card warn" id="mc-max">
<div class="value" id="val-max">0</div>
<div class="label">最大回报</div>
</div>
<div class="metric-card" id="mc-phase">
<div class="value" id="val-phase"><span class="phase-tag phase-early">未开始</span></div>
<div class="label">训练阶段</div>
</div>
</div>
<div class="progress-bar"><div class="fill" id="progress-fill" style="width:0%"></div></div>
</div>
<!-- CartPole 动画 -->
<div class="panel">
<h2>🎯 CartPole 实时动画</h2>
<canvas id="cartpole-canvas" width="560" height="300"></canvas>
</div>
<!-- 训练曲线 -->
<div class="panel">
<h2>📈 训练曲线</h2>
<canvas id="chart-canvas" width="560" height="300"></canvas>
</div>
<!-- 控制面板 -->
<div class="panel full-width">
<h2>⚙️ 回放控制</h2>
<div class="controls">
<button id="btn-play" class="active" onclick="togglePlay()">▶ 播放</button>
<button onclick="setSpeed(0.5)">0.5x</button>
<button onclick="setSpeed(1)" class="active" id="btn-1x">1x</button>
<button onclick="setSpeed(3)">3x</button>
<button onclick="setSpeed(10)">10x</button>
<div class="slider-wrap">
<input type="range" id="iter-slider" min="0" max="100" value="0"
oninput="seekTo(this.value)">
</div>
<div class="iter-label" id="slider-label">Iter 0 / 0</div>
</div>
</div>
</div>
<script>
// ========== 数据 ==========
const history = {{history_json}};
const episodes = {{episodes_json}};
const totalIters = history.iteration ? history.iteration.length : 0;
// ========== 状态 ==========
let currentIter = 0;
let playing = true;
let speed = 1;
let lastTime = 0;
let accumTime = 0;
// 初始化 slider
const slider = document.getElementById('iter-slider');
slider.max = Math.max(0, totalIters - 1);
// ========== CartPole 动画 ==========
const cpCanvas = document.getElementById('cartpole-canvas');
const cpCtx = cpCanvas.getContext('2d');
function simulateCartPole(avgReward) {{
const maxSteps = Math.min(Math.max(Math.round(avgReward), 10), 500);
const stability = Math.min(avgReward / 200, 1.0);
const states = [];
let x = 0, v = 0, theta = (1 - stability) * 0.3 * (Math.random() - 0.5), omega = 0;
for (let i = 0; i < maxSteps; i++) {{
const force = -theta * 10 * stability - omega * 2 * stability + (1 - stability) * (Math.random() - 0.5) * 2;
const cosT = Math.cos(theta), sinT = Math.sin(theta);
omega += (9.8 * sinT - force * cosT * 0.1) * 0.02;
theta += omega * 0.02;
v += force * 0.02;
x += v * 0.02;
x = Math.max(-2.4, Math.min(2.4, x));
states.push({{ x, v, theta, omega }});
if (Math.abs(theta) > 0.5) break;
}}
return states;
}}
let cartStates = simulateCartPole(10);
let cartFrame = 0;
function drawCartPole() {{
const W = cpCanvas.width, H = cpCanvas.height;
cpCtx.clearRect(0, 0, W, H);
cpCtx.strokeStyle = '#1a1a3a';
cpCtx.lineWidth = 0.5;
for (let y = 0; y < H; y += 20) {{
cpCtx.beginPath(); cpCtx.moveTo(0, y); cpCtx.lineTo(W, y); cpCtx.stroke();
}}
const state = cartStates[cartFrame % cartStates.length];
const cx = W / 2 + state.x * 80;
const cy = H * 0.75;
const cartW = 60, cartH = 24;
const poleLen = 100;
cpCtx.strokeStyle = '#3a3a5a';
cpCtx.lineWidth = 2;
cpCtx.beginPath();
cpCtx.moveTo(40, cy + cartH / 2 + 8);
cpCtx.lineTo(W - 40, cy + cartH / 2 + 8);
cpCtx.stroke();
cpCtx.fillStyle = '#4a6fa5';
cpCtx.strokeStyle = '#7eb8ff';
cpCtx.lineWidth = 2;
cpCtx.beginPath();
cpCtx.roundRect(cx - cartW / 2, cy - cartH / 2, cartW, cartH, 4);
cpCtx.fill(); cpCtx.stroke();
cpCtx.fillStyle = '#2a2a5a';
cpCtx.beginPath(); cpCtx.arc(cx - 18, cy + cartH / 2 + 4, 6, 0, Math.PI * 2); cpCtx.fill();
cpCtx.beginPath(); cpCtx.arc(cx + 18, cy + cartH / 2 + 4, 6, 0, Math.PI * 2); cpCtx.fill();
const poleEndX = cx + Math.sin(state.theta) * poleLen;
const poleEndY = cy - Math.cos(state.theta) * poleLen;
const tiltRatio = Math.min(Math.abs(state.theta) / 0.3, 1);
const r = Math.round(255 * tiltRatio);
const g = Math.round(255 * (1 - tiltRatio));
cpCtx.strokeStyle = `rgb(${{r}}, ${{g}}, 80)`;
cpCtx.lineWidth = 6;
cpCtx.lineCap = 'round';
cpCtx.beginPath();
cpCtx.moveTo(cx, cy - cartH / 2);
cpCtx.lineTo(poleEndX, poleEndY);
cpCtx.stroke();
cpCtx.fillStyle = cpCtx.strokeStyle;
cpCtx.beginPath(); cpCtx.arc(poleEndX, poleEndY, 5, 0, Math.PI * 2); cpCtx.fill();
cpCtx.fillStyle = '#888';
cpCtx.font = '12px monospace';
cpCtx.fillText(`Step: ${{cartFrame % cartStates.length}} / ${{cartStates.length}}`, 12, 20);
const angleDeg = (state.theta * 180 / Math.PI).toFixed(1);
cpCtx.fillText(`Angle: ${{angleDeg}}°`, 12, 36);
}}
// ========== 训练曲线 ==========
const chartCanvas = document.getElementById('chart-canvas');
const chartCtx = chartCanvas.getContext('2d');
function drawChart() {{
const W = chartCanvas.width, H = chartCanvas.height;
chartCtx.clearRect(0, 0, W, H);
if (totalIters === 0) return;
const pad = {{ l: 50, r: 20, t: 20, b: 30 }};
const plotW = W - pad.l - pad.r;
const plotH = H - pad.t - pad.b;
const n = currentIter + 1;
const avgR = history.avg_reward.slice(0, n);
const maxR = history.max_reward.slice(0, n);
const minR = history.min_reward.slice(0, n);
const allVals = [...avgR, ...maxR];
const yMax = Math.max(100, ...allVals) * 1.1;
const yMin = 0;
const xScale = (i) => pad.l + (i / Math.max(totalIters - 1, 1)) * plotW;
const yScale = (v) => pad.t + plotH - ((v - yMin) / (yMax - yMin)) * plotH;
chartCtx.strokeStyle = '#1a1a3a';
chartCtx.lineWidth = 0.5;
for (let y = 0; y <= yMax; y += 50) {{
const py = yScale(y);
chartCtx.beginPath(); chartCtx.moveTo(pad.l, py); chartCtx.lineTo(W - pad.r, py); chartCtx.stroke();
chartCtx.fillStyle = '#555';
chartCtx.font = '10px monospace';
chartCtx.textAlign = 'right';
chartCtx.fillText(y.toFixed(0), pad.l - 6, py + 3);
}}
if (n > 1) {{
chartCtx.fillStyle = 'rgba(126, 184, 255, 0.1)';
chartCtx.beginPath();
chartCtx.moveTo(xScale(0), yScale(maxR[0]));
for (let i = 1; i < n; i++) chartCtx.lineTo(xScale(i), yScale(maxR[i]));
for (let i = n - 1; i >= 0; i--) chartCtx.lineTo(xScale(i), yScale(minR[i]));
chartCtx.closePath(); chartCtx.fill();
}}
chartCtx.strokeStyle = '#7eb8ff';
chartCtx.lineWidth = 2;
chartCtx.beginPath();
for (let i = 0; i < n; i++) {{
const x = xScale(i), y = yScale(avgR[i]);
i === 0 ? chartCtx.moveTo(x, y) : chartCtx.lineTo(x, y);
}}
chartCtx.stroke();
if (n > 0) {{
const cx = xScale(n - 1), cy = yScale(avgR[n - 1]);
chartCtx.fillStyle = '#7eb8ff';
chartCtx.beginPath(); chartCtx.arc(cx, cy, 4, 0, Math.PI * 2); chartCtx.fill();
chartCtx.fillStyle = '#fff';
chartCtx.font = '11px monospace';
chartCtx.textAlign = 'left';
chartCtx.fillText(avgR[n - 1].toFixed(1), cx + 8, cy - 6);
}}
if (yMax >= 475) {{
const goalY = yScale(475);
chartCtx.strokeStyle = '#ff6b6b';
chartCtx.lineWidth = 1;
chartCtx.setLineDash([6, 3]);
chartCtx.beginPath(); chartCtx.moveTo(pad.l, goalY); chartCtx.lineTo(W - pad.r, goalY); chartCtx.stroke();
chartCtx.setLineDash([]);
chartCtx.fillStyle = '#ff6b6b';
chartCtx.fillText('Goal: 475', W - pad.r - 60, goalY - 6);
}}
chartCtx.fillStyle = '#555';
chartCtx.textAlign = 'center';
chartCtx.fillText('Iteration', W / 2, H - 4);
}}
// ========== 指标更新 ==========
function updateMetrics() {{
if (totalIters === 0) return;
const i = Math.min(currentIter, totalIters - 1);
const avg = history.avg_reward[i];
const max = history.max_reward[i];
document.getElementById('val-iter').textContent = history.iteration[i];
document.getElementById('val-reward').textContent = avg.toFixed(1);
document.getElementById('val-max').textContent = max.toFixed(0);
let phase, cls;
if (avg < 30) {{ phase = '探索阶段'; cls = 'phase-early'; }}
else if (avg < 100) {{ phase = '学习中'; cls = 'phase-learning'; }}
else {{ phase = '趋于稳定'; cls = 'phase-good'; }}
document.getElementById('val-phase').innerHTML = `<span class="phase-tag ${{cls}}">${{phase}}</span>`;
const pct = ((i + 1) / totalIters * 100).toFixed(1);
document.getElementById('progress-fill').style.width = pct + '%';
slider.value = i;
document.getElementById('slider-label').textContent = `Iter ${{i + 1}} / ${{totalIters}}`;
}}
// ========== 动画循环 ==========
function animate(timestamp) {{
if (!lastTime) lastTime = timestamp;
const dt = timestamp - lastTime;
lastTime = timestamp;
if (playing && totalIters > 0) {{
accumTime += dt * speed;
while (accumTime > 200 && currentIter < totalIters - 1) {{
accumTime -= 200;
currentIter++;
const avg = history.avg_reward[currentIter];
cartStates = simulateCartPole(avg);
cartFrame = 0;
}}
}}
if (cartStates.length > 0) {{
cartFrame++;
if (cartFrame >= cartStates.length) {{
if (totalIters > 0) {{
const avg = history.avg_reward[Math.min(currentIter, totalIters - 1)];
cartStates = simulateCartPole(avg);
}}
cartFrame = 0;
}}
}}
drawCartPole();
drawChart();
updateMetrics();
requestAnimationFrame(animate);
}}
// ========== 控制函数 ==========
function togglePlay() {{
playing = !playing;
document.getElementById('btn-play').textContent = playing ? '⏸ 暂停' : '▶ 播放';
document.getElementById('btn-play').classList.toggle('active', playing);
}}
function setSpeed(s) {{
speed = s;
document.querySelectorAll('.controls button').forEach(b => {{
if (b.textContent.includes('x')) b.classList.remove('active');
}});
const btn = [...document.querySelectorAll('.controls button')].find(b => b.textContent === s + 'x');
if (btn) btn.classList.add('active');
}}
function seekTo(val) {{
currentIter = parseInt(val);
if (totalIters > 0) {{
const avg = history.avg_reward[Math.min(currentIter, totalIters - 1)];
cartStates = simulateCartPole(avg);
cartFrame = 0;
}}
}}
// ========== 启动 ==========
requestAnimationFrame(animate);
</script>
</body>
</html>"""
with open(output_path, 'w') as f:
f.write(html)
print(f"✓ 可视化页面已生成: {output_path}")
print(f" 用浏览器打开即可查看训练回放动画")
if __name__ == "__main__":
h = sys.argv[1] if len(sys.argv) > 1 else "training_history.json"
generate_html(history_path=h)A9. examples/rl_agent/plot_results.py
python
"""
训练结果可视化
读取 training_history.json,生成训练曲线图。
运行方式:
python plot_results.py
依赖:
pip install matplotlib
"""
import json
import sys
try:
import matplotlib
matplotlib.use("Agg") # 无 GUI 环境使用 Agg 后端
import matplotlib.pyplot as plt
except ImportError:
print("请先安装 matplotlib: pip install matplotlib")
sys.exit(1)
import numpy as np
def load_history(path="training_history.json"):
with open(path) as f:
return json.load(f)
def plot_training_curve(history, save_path="training_curve.png"):
"""
绘制训练曲线,包含:
- 平均回报(主线)
- 最大/最小回报(阴影区域)
- 目标线
"""
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(10, 8), sharex=True)
iters = history["iteration"]
avg = history["avg_reward"]
max_r = history["max_reward"]
min_r = history["min_reward"]
loss = history["loss"]
# ---- 上图: 回报曲线 ----
ax1.plot(iters, avg, color="#2196F3", linewidth=2, label="Avg Reward")
ax1.fill_between(iters, min_r, max_r, alpha=0.2, color="#2196F3", label="Min-Max Range")
ax1.axhline(y=475, color="#F44336", linestyle="--", linewidth=1, label="Solved (475)")
# 滑动平均
if len(avg) >= 10:
window = 10
smoothed = np.convolve(avg, np.ones(window) / window, mode="valid")
ax1.plot(
iters[window - 1:], smoothed,
color="#FF9800", linewidth=2, linestyle="-", label=f"Smoothed ({window}-iter)"
)
ax1.set_ylabel("Episode Reward")
ax1.set_title("openYuanrong Distributed RL Training - CartPole-v1")
ax1.legend(loc="lower right")
ax1.grid(True, alpha=0.3)
# ---- 下图: Loss 曲线 ----
ax2.plot(iters, loss, color="#9C27B0", linewidth=1.5, alpha=0.7, label="Policy Loss")
ax2.set_xlabel("Iteration")
ax2.set_ylabel("Loss")
ax2.legend(loc="upper right")
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig(save_path, dpi=150, bbox_inches="tight")
print(f"✓ 训练曲线已保存到 {save_path}")
if __name__ == "__main__":
path = sys.argv[1] if len(sys.argv) > 1 else "training_history.json"
history = load_history(path)
plot_training_curve(history)