GeoTIFF 高程数据可视化:从不可见到可感知
前言
一张 GeoTIFF 高程图片,每个像素存储的不是颜色,而是一个浮点数------代表该点的海拔高度。这样的图片无法直接展示给人眼,甚至很多 TIFF 都只有单通道。那么,如何让这些「看不见」的数据变成「看得懂」的地形图呢?
本文将介绍两个核心技术:山体阴影(Hillshade) 和 色带映射(Color Ramp) ,并结合 WebGL2 GPU 加速,实现高程数据的实时可视化。
1. 问题:为什么 TIFF 高程图无法直接展示?
普通图片的每个像素是 RGB 颜色值(0~255),人眼可以直接辨识。而高程 TIFF 中的像素值可能是:
css
像素[0][0] = 342.7 (海拔342.7米)
像素[0][1] = 343.1
像素[1][0] = 341.9
...这些浮点数没有颜色含义,且数据范围远超 0~255。即使强制显示为灰度图,你看到的只是一片近乎均匀的灰色------因为相邻像素的高程差异太小,人眼根本分辨不出。

我们需要两种手段来让高程信息「可见」:
- 山体阴影:通过模拟光照产生明暗对比,让地形起伏变得可感知
- 色带映射:将高程值映射到一组有意义的颜色上,让海拔高低一目了然
2. 山体阴影(Hillshade)的原理
山体阴影的核心思路是:如果知道地表每一点的朝向(法线),就能计算出阳光照射到该点时的明暗程度。
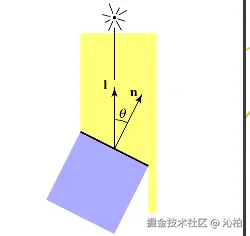
兰伯特余弦定理Lambert's cosine law
一个表面接收的光照能量与 法线 n 和 光照方向 l 的余弦相关。见下图。
我们现在只有一张图片,里面的每个像素表示一个高程。那么如何获取地表的法线呢?
2.1 从高程到梯度:Sobel 卷积
要知道地表的朝向,首先需要知道地形在 x 和 y 方向上的变化率(梯度)。这通过 Sobel 算子 对高程数据做 3×3 邻域卷积来实现。
对于当前像素 C,采样其周围的 8 个像素:
css
tl tp tr
l [C] r
bl b brSobel 算子对 x 方向和 y 方向分别定义了权重矩阵:
css
Gx = [[-1, 0, 1], Gy = [[ 1, 2, 1],
[-2, 0, 2], [ 0, 0, 0],
[-1, 0, 1]] [-1, -2, -1]]对一个像素周围的所有的像素取出,获取它们的高程值,在通过上述权重矩阵进行加权平均。
计算梯度代码如下:
scss
dz/dx = ((tr + 2r + br) - (tl + 2l + bl)) / (8 × cellSizeX)
dz/dy = ((tl + 2tp + tr) - (bl + 2b + br)) / (8 × cellSizeY)dz/dx 表示高程对x轴的变化速度 dz/dy 表示高程对y轴的变化速度
其中
cellSizeX和cellSizeY是每个像素在实际地理空间中代表的距离(单位:米),这样梯度的物理意义就是真实坡度(米/米) 。
2.2 从梯度到法线
有了 x/y 方向的梯度后,地表法线向量可以直接构造:
scss
normal = normalize(-dz/dx × zFactor, -dz/dy × zFactor, 1.0)zFactor是高程夸张系数,值越大,山体起伏在视觉上越明显- 法线的 z 分量为 1.0,因为梯度已经是真实坡度(米/米),无需再做缩放
- 取负号是因为梯度方向指向高程增大的方向,而法线应该指向地表的「外侧」
2.3 Lambert 漫反射光照
有了法线和光线方向,就可以用 Lambert 余弦定理 计算照明强度:
ini
shade = max(dot(normal, lightDir), 0.0) × intensitylightDir是归一化后的光线方向向量dot(normal, lightDir)即两个向量的点积,等于cos(θ),θ 为法线与光线的夹角- 当面朝光线时 cos(θ) ≈ 1,完全背光时 cos(θ) ≤ 0(取 0)
intensity控制光照强度
这是最经典的漫反射模型:法线越朝向光源越亮,越背离光源越暗。
最终输出为灰度图:亮处代表阳面,暗处代表阴面,人眼就能直观地感受到山体的立体起伏。
3. 色带映射(Color Ramp)
山体阴影解决了「分辨起伏」的问题,但无法区分海拔高低。色带映射通过将高程值映射到一组预定义颜色来解决这一问题。
3.1 高程归一化
首先将高程值归一化到 0, 1 区间:
ini
t = (elevation - minElevation) / (maxElevation - minElevation)3.2 色带控制点
定义一组控制点,每个控制点指定一个归一化位置和对应的 RGBA 颜色:
less
const TERRAIN_COLOR_RAMP: ColorStop[] = [ { offset: 0.0, color: [0, 97, 0, 128] }, // 深绿 --- 低海拔
{ offset: 0.15, color: [16, 122, 0, 128] }, // 绿
{ offset: 0.3, color: [132, 173, 54, 128] }, // 黄绿
{ offset: 0.45, color: [202, 204, 68, 128] }, // 黄
{ offset: 0.6, color: [185, 152, 90, 128] }, // 棕黄
{ offset: 0.75, color: [148, 107, 62, 128] }, // 棕
{ offset: 0.9, color: [178, 178, 178, 128] }, // 灰
{ offset: 1.0, color: [255, 255, 255, 128] }, // 白 --- 高海拔/雪线
];这是经典的 hypsometric tints(等高着色)方案:低处绿色(植被),中部棕黄(裸岩),高处灰白(雪线)。
3.3 插值生成 1D 纹理
将控制点之间进行线性插值,生成一条固定宽度(如 256 像素)的颜色带:
ini
// 对每个纹素位置 t ∈ [0, 1]
// 找到 t 所在的两个相邻控制点 lower 和 upper
// 在两者之间做线性插值
factor = (t - lower.offset) / (upper.offset - lower.offset)
color = lower.color + (upper.color - lower.color) × factor这个颜色带作为 1D 查找纹理上传到 GPU,片元着色器中只需一次 texture() 采样即可查到对应颜色。
4. WebGL2 GPU 加速实现
上述算法如果在 CPU 上逐像素计算,对于大尺寸的 TIFF 会非常慢。通过 WebGL2,我们将整个计算过程交给 GPU 并行执行。
4.1 整体流水线
javascript
高程数据 (Float32Array)
│
▼
┌──────────────────────────────────────────┐
│ GPU 纹理上传 │
│ ┌──────────────┐ ┌──────────────────┐ │
│ │ 高程纹理 R32F │ │ 色带纹理 RGBA8 │ │
│ │ 纹理单元 0 │ │ 纹理单元 1 │ │
│ └──────┬───────┘ └────────┬─────────┘ │
│ │ │ │
│ ▼ ▼ │
│ ┌──────────────────────────────────┐ │
│ │ 片元着色器(每像素并行执行) │ │
│ │ │ │
│ │ 1. NoData 检测 → 透明输出 │ │
│ │ 2. 高程归一化 → t ∈ [0, 1] │ │
│ │ 3. 色带纹理采样 → RGBA 颜色 │ │
│ │ 4. Sobel 3×3 → 梯度 dz/dx, dy │ │
│ │ 5. 梯度 → 地表法线 │ │
│ │ 6. Lambert 光照 → shade 值 │ │
│ │ 7. 环境光混合 │ │
│ │ 8. 色带颜色 × 阴影亮度 → 输出 │ │
│ └──────────────┬───────────────────┘ │
│ │ │
│ ▼ │
│ ┌──────────────────────────────────┐ │
│ │ readPixels → Uint8Array → ImageData │
│ └──────────────────────────────────┘ │
└──────────────────────────────────────────┘4.2 关键实现细节
高程纹理使用 R32F 格式
高程值是浮点数,使用 gl.R32F(单通道 32 位浮点)格式存储,采样方式设为 NEAREST,避免高程值被纹理插值篡改:
arduino
gl.texImage2D(gl.TEXTURE_2D, 0, gl.R32F, width, height, 0,
gl.RED, gl.FLOAT, heightData);色带纹理使用 LINEAR 采样
色带纹理使用 LINEAR 采样,这样即使纹理分辨率不高,颜色过渡也是平滑的:
ini
gl.texParameteri(gl.TEXTURE_2D, gl.TEXTURE_MIN_FILTER, gl.LINEAR);
gl.texParameteri(gl.TEXTURE_2D, gl.TEXTURE_MAG_FILTER, gl.LINEAR);cellSize:像素到真实距离的换算
地理坐标系中,经度方向的实际距离随纬度变化。取影像中心纬度进行近似:
ini
const metersPerDegLat = 111320;
const metersPerDegLng = 111320 * Math.cos(centerLat × π / 180);
const cellSizeX = (经度跨度 × metersPerDegLng) / 图像宽度;
const cellSizeY = (纬度跨度 × metersPerDegLat) / 图像高度;这保证了 Sobel 梯度的物理单位正确,山体阴影不会因为像素比例失真。
环境光(Ambient Light)防止全黑
纯 Lambert 模型下,完全背光的区域会变成纯黑。加入环境光的最低亮度:
ini
float finalShade = mix(u_ambientLight, 1.0, shade);当 shade = 0(完全背光)时,输出为 ambientLight(如 0.15),而非 0。
4.3 片元着色器核心代码
scss
void main() {
float elev = getHeight(v_texCoord);
// NoData 检测:无效像素输出全透明
if (u_hasNoData > 0.5 && elev == u_noDataValue) {
fragColor = vec4(0.0);
return;
}
// 高程归一化 → 色带查找
float t = clamp((elev - u_minElevation) / elevRange, 0.0, 1.0);
vec4 rampColor = texture(u_colorRamp, vec2(t, 0.5));
// Sobel 3×3 采样邻域
float tl = getHeight(v_texCoord + vec2(-texelSize.x, texelSize.y));
// ... 其余 7 个方向 ...
// 计算梯度(除以真实像素距离)
float dzdx = ((tr + 2.0*r + br) - (tl + 2.0*l + bl)) / (8.0 * u_cellSize.x);
float dzdy = ((tl + 2.0*tp + tr) - (bl + 2.0*b + br)) / (8.0 * u_cellSize.y);
// 构建法线 → Lambert 光照
vec3 normal = normalize(vec3(-dzdx * u_zFactor, -dzdy * u_zFactor, 1.0));
float shade = max(dot(normal, u_lightDir), 0.0) * u_intensity;
// 环境光混合
float finalShade = mix(u_ambientLight, 1.0, shade);
// 最终输出:色带颜色 × 阴影亮度
fragColor = vec4(rampColor.rgb * finalShade, rampColor.a);
}一次 Pass,所有计算在片元着色器中同时完成------无需多趟渲染或中间缓冲区。
我们通过 webgl的readPixels 获取图片像素数据,再把它贴图到地图上,最终效果如下所示:


观察到地形的细节还是不错的。
5. 完整数据流总结
arduino
GeoTIFF 文件
│
▼
┌─────────────────────┐
│ geotiff.js 解码 │
│ → 宽、高、通道数 │
│ → Float32 栅格数据 │
└─────────┬───────────┘
│
┌─────────┴───────────┐
│ │
▼ ▼
┌────────────────┐ ┌────────────────┐
│ 元数据统计 │ │ 色带控制点 │
│ min/max 高程 │ │ 线性插值 │
│ NoData 处理 │ │ → 1D RGBA 纹理 │
└───────┬────────┘ └───────┬────────┘
│ │
▼ ▼
┌─────────────────────────────────────┐
│ WebGL2 单 Pass 渲染 │
│ │
│ 高程纹理(R32F) + 色带纹理(RGBA8) │
│ ↓ │
│ 片元着色器: │
│ NoData → Sobel → 法线 → Lambert │
│ → 色带采样 → 混合 → 输出 │
└──────────────┬──────────────────────┘
│
▼
┌──────────┐
│ ImageData │
│ RGBA 可视化│
└──────────┘6. 效果调参指南
| 参数 | 作用 | 建议值 |
|---|---|---|
lightSource.direction |
光线方向向量 (x, y, z) | [-1, -1, 2] 模拟西北方向阳光 |
lightSource.intensity |
光照强度 | 0.8 ~ 1.5 |
zFactor |
高程夸张系数 | 平原地区 2 |
ambientLight |
环境光最低亮度 | 0.1 ~ 0.2 |
colorRamp |
自定义色带 | 按需定义,支持任意 RGBA 控制点 |
总结
GeoTIFF 高程可视化的本质是两个映射的叠加:
- 高程 → 颜色(色带映射):让人一眼区分海拔高低
- 高程 → 明暗(山体阴影):让人感知地形的立体起伏
两者结合------色带颜色乘以阴影亮度------就得到了既有色彩信息又有立体感的地形可视化图像。借助 WebGL2 的并行计算能力,整个过程在一次 GPU Pass 中完成,即使面对大尺寸高程数据也能高效处理。