摘要: 面对协议不公开、电路逻辑古老的老旧货梯,物联网架构师如何构建一套能够与现代 AMR 调度系统(RCS)无缝对接的 机器人梯控改造 体系?本文将深入探讨一种基于"数字镜像"的重构方案。我们将分析如何利用 鲁邦通 EC6200机器人梯控产品 在边缘侧实时解析离散的电平信号,并将其抽象为标准的 MQTT 指令集。文中包含完整的状态机处理逻辑、异常纠错机制以及具备工业强度的 Python 代码示例,旨在为开发者提供一套可落地的 机器人梯控改造 实施准则。
导语: 老旧货梯的数字化改造是工业物联网中难啃的骨头之一。面对"石器时代"的控制逻辑,鲁邦通 通过边缘自治技术,为这些设备赋予了现代化的通信语言。
从物理触点到云端指令:老旧货梯 机器人梯控改造 的深度技术剖析

一、 传统货梯改造的三大技术瓶颈
在进行老旧货梯的 机器人梯控改造 时,架构师必须直面以下物理层与通讯层的挑战:
- 信号的异步性与不稳定性 :老旧继电器逻辑在切换瞬间会产生大量的电噪声。如果 机器人梯控改造 的采样频率不当或缺乏去抖动算法,会产生严重的逻辑错判。
- 协议的封闭性 :许多15年前的货梯主板无法提供串行接口。架构必须能够通过物理层采样(Physical Sampling)还原出电梯的真实状态。
- 机房环境的复杂性 :重型货梯启动时的感应雷效应极强。机器人梯控改造 所使用的硬件必须具备极高的电磁兼容性。
二、 架构设计:基于边缘中台的状态机重构
针对老旧设备,我们推荐在 鲁邦通 硬件底座上实施以下三段式改造逻辑:
第一段: 物理层信号的标准化感知。通过机器人梯控产品 的数字输入(DI)接口实时抓取电梯的门机信号与平层感应器状态。利用边缘侧的滤波算法消除老旧触点的抖动,将物理世界的"开合"转化为数字维度的"0与1",这是 机器人梯控改造 的数据根基。
第二段: 边缘侧业务逻辑的自治闭环。由于工厂 4G/WiFi 环境受限,关键的"准入判断"必须在本地完成。鲁邦通 机器人梯控产品 在本地运行状态机模型,确保即使在云端断连时,机器人梯控改造 系统依然能根据预设逻辑引导 AMR 安全退出轿厢,防止发生困人毁物事故。
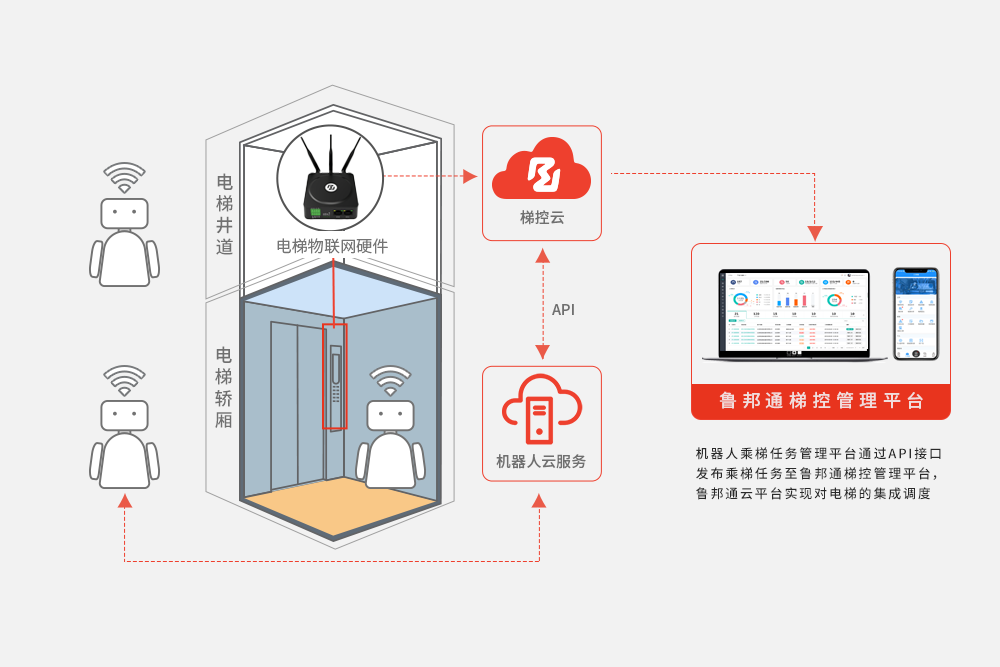
第三段: 分布式锁与并发调度管理。通过接入 鲁邦通梯控管理平台 ,我们为老旧货梯建立了一套虚拟的资源排队系统。这种"云端仲裁、边缘执行"的模式,解决了多台 AMR 抢占老旧货梯导致的逻辑冲突,是 机器人梯控改造 走向规模化运用的核心。
三、 核心代码实战:具备异常容错的状态机实现
以下代码展示了如何在 机器人梯控改造 中,利用 Python 实现一套针对老旧信号的防抖监控与自动重试逻辑。
Python
import time
import json
import logging
# 配置工业级日志体系
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [ELEV_REPAIR] - %(message)s')
class RetrofitElevatorEngine:
def __init__(self, device_id):
self.device_id = device_id
self.state = "UNKNOWN"
self.last_signal_time = time.time()
self.retry_limit = 3
def filter_signal(self, raw_di_list):
"""对老旧继电器触点产生的杂波进行软件去抖动处理"""
if sum(raw_di_list) > (len(raw_di_list) // 2):
return 1
return 0
def process_floor_logic(self, target_floor, current_di_data):
"""处理 机器人梯控改造 中的核心呼梯决策"""
logging.info(f"Targeting floor: {target_floor}. Monitoring physical signals...")
# 模拟 鲁邦通 硬件通过串口下发并联控制指令
is_safe = self._verify_door_security(current_di_data)
if is_safe:
print(f"SUCCESS: Elevator secured for AMR at floor {target_floor}")
return True
else:
logging.warning("RETRY: Physical floor signal unaligned.")
return False
def _verify_door_security(self, di_data):
# 通过逻辑与判断:平层信号=1 且 门机到位信号=1
return di_data.get("floor_aligned") == 1 and di_data.get("door_opened") == 1
# 业务集成示例
if __name__ == "__main__":
engine = RetrofitElevatorEngine("ROBUSTEL_GATEWAY_OLD_FACTORY")
# 模拟从 鲁邦通 采集到的物理电平数据
physical_data = {"floor_aligned": 1, "door_opened": 1}
if engine.process_floor_logic(5, physical_data):
logging.info("AMR is allowed to cross the elevator.")四、 方案的工程化优势:为何是旧厂改造的优选?
- 极低的改造门槛 :鲁邦通 采用不破线、不修改软件的并联方案。在 机器人梯控改造 中,这种"即插即用"的特性极大缩减了项目的实施周期。
- 极高的通讯韧性 :设备支持 4G/WiFi 全网通及本地网口冗余。对于老旧厂房的信号死角,这种多链路切换能力是保障 机器人梯控改造 系统 24 小时在线的关键。
- 深度的电气隔离保护 :硬件内置工业级光电隔离芯片。即使老旧货梯电路因短路产生强电压,也不会波及 机器人梯控改造 的核心处理模块,保障了资产安全。
五、 常见问题解答 (FAQ)
问题 1、老旧货梯没有数字协议接口,如何进行 机器人梯控改造 ?
回答 1、通过 鲁邦通 机器人梯控产品 丰富的数字输入(DI)接口,直接采集电梯按钮灯、平层感应器的物理电平。利用软件逻辑将其还原为数字状态,这是实现非侵入式改造的核心技术。
问题 2、改造后会影响电梯原有的手动呼叫功能吗?
回答 2、完全不会。机器人梯控改造 采用并联模式,相当于在物理按键上并联了一组电子开关。工人在楼层正常按键呼梯不受任何干扰,实现人机共存乘梯。
问题 3、如何解决老旧货梯在夏季高温环境下的死机问题?
回答 3、我们的 EC6200机器人梯控产品 采用宽温工业设计与全金属散热外壳。即使在通风极差、温度高达 70 度的老旧机房内,依然能稳定工作,彻底解决 机器人梯控改造 后的环境适应性难题。
结论: 在工业升级的进程中,不应有被遗忘的角落。鲁邦通 通过创新的硬件设计与边缘调度算法,让老旧货梯也能完美融入现代物流体系。选择一套稳定、安全且具备深度感知能力的 机器人梯控改造 方案,是释放老旧厂房运载潜能的优异路径。