前言
openclaw 不用介绍了,现在正大红大紫中。openclaw的出现,也标志着大模型工具从较为专业的人群使用,到了更广泛的非专业人士使用,一下子用户群大了很多,也成了既chatgpt之后又一个现象级产品。
最初llm是用来问答交流的,后来开始升级为api调用,进行大量数据基建。再之后,llm开始有了function calling、memory这些,然后开始迈向第一站专业挣钱的工具:辅助编程。cursor是最早出名的,后面还有很多。现在的openclaw,我认为是辅助流程,已经不限于单个领域,而是多领域,集成性更强了。(其价值在于更多的替代人的流程工作)
春节期间我也研究了一下,之前我的很多开发,一个重要的汇聚点和openclaw是一样的。最核心的AEE需要花点时间,但我也可以用langchain先顶上。未来左手andybot(自研,全python栈),右手openclaw(借力,js栈),所以我现在是把openclaw当老师来的。
Agent Swarm 基本概念
Agent Swarm(智能体蜂群)是一种 多智能体协同架构(multi-agent architecture)。核心思想来源于 群体智能(swarm intelligence):不是依赖一个强大的单体 Agent,而是由多个功能专一的小 Agent 协同完成复杂任务。
Agent Swarm 本质是:
多个独立 Agent + 任务分解 + 协作通信
每个 Agent 通常具有:
-
独立的 prompt / role
-
独立的 工具集(tools)
-
独立的 上下文
-
独立的 决策能力
系统通过某种 **编排机制(orchestrator)**让它们协作。
bash
User Task
│
▼
Coordinator Agent
│
├── Research Agent
├── Coding Agent
├── Planning Agent
├── Review Agent
│
▼
Result Aggregation典型结构
bash
┌───────────────────────────┐
│ User Interface │
└─────────────┬─────────────┘
│
┌─────────────▼─────────────┐
│ Orchestrator / Router │
│ (任务调度 / 分发) │
└─────────────┬─────────────┘
│
┌────────┴────────┐
▼ ▼
┌────────────┐ ┌────────────┐
│ Agent Pool │ │ Agent Pool │
│ Research │ │ Coding │
│ Planner │ │ Critic │
└────────────┘ └────────────┘
│ │
▼ ▼
Shared Memory / Tools核心组件:
1 Orchestrator(调度器)
- 负责:任务分解
- Agent 调用
- 执行流程控制
实现方式:
- workflow DAG
- planner agent
- rule based router
2 Agent Pool(Agent 集群)
每个 Agent 是:Agent = LLM + Prompt + Tools + Memory
例如:
- Research Agent
bash
role: research expert
tools:
- search
- browse
- summarize- Coder Agent
bash
role: software engineer
tools:
- code executor
- file system3 Communication(通信)
Agent 之间通过:
- message passing
- shared memory
- event bus
典型数据结构:
bash
{
"from": "planner",
"to": "researcher",
"task": "collect information about X"
}4 Shared Memory
常见两种:
- 短期 memory
bash
conversation state
task state- 长期 memory
vector DB
knowledge base
常见实现:
Redis
Weaviate
Chroma
5 Tool Layer
Agent 调用工具:
bash
search()
execute_code()
query_db()
call_api()工具调用通常使用:
- function calling
- MCP
- tool schema
Swarm 的运行机制
- Step1 用户输入任务
"分析 AI agent 架构并给出方案"
- Step2 Planner Agent 分解任务
Planner 生成 plan:
1 collect research
2 analyze architecture
3 generate solution
4 review output-
Step3 分配 Agent
research_agent -> step1
analysis_agent -> step2
writer_agent -> step3
critic_agent -> step4 -
Step4 Agent 并行执行
research_agent
└─ searchanalysis_agent
└─ reasoningwriter_agent
└─ generate report
可以:串行、并行(本质上应该是执行图)
- Step5 汇总结果
Coordinator 汇总:
final_result = merge(agent_outputs)Swarm 的实现方式
目前主要有 4 种技术路线。
1 Router 模式(最简单)
Router 根据任务选择 agent。
bash
User
│
Router
├─ coding agent
├─ research agent
└─ math agent典型实现:LangChain、LlamaIndex
2 Planner 模式
LLM 先生成执行计划。
bash
LLM -> Plan
│
▼
Execute Steps典型:
BabyAGI
3 Graph / Workflow 模式
任务作为 DAG workflow。
bash
task
├─ research
│ └─ summarize
└─ coding
└─ test典型:LangGraph
4 Fully Decentralized Swarm
Agent 自主通信。
Agent A ↔ Agent B ↔ Agent C类似:swarm robotics、distributed AI
代表项目:CrewAI
Swarm 的优势
- 1 模块化:每个 agent 负责一个领域。
- 2 可扩展:新增 agent 非常容易。
- 3 并行执行
- 4 prompt 更稳定:单 agent prompt 不需要非常复杂。
示例
python
agents = {
"research": ResearchAgent(),
"coder": CodingAgent(),
"critic": CriticAgent()
}
plan = planner.create_plan(user_task)
for step in plan:
agent = agents[step.agent]
result = agent.run(step.task)
memory.store(result)
final = critic.review(memory)核心理念
为什么要用swarm,我想从核心理念上来简单说明。
1 能力受限的智能体
虽然现在的大模型不断的迭代,但是在实际的过程中,我仍然感受到了从背后的本质上看,大模型的能力是相对有限的。
我想或许可以用逻辑复杂度来定义模型的能力。 当逻辑复杂度高于一定级别,大模型通常是无法完成任务的。例如,当你要它设计一个很复杂的程序逻辑结构,它基本会失败;当你要它做一个简单项目,通常会成功。单个脚本的编程成功率,通常可以one take;而整个项目的编写通常不能;针对一个对象的逻辑编写通常可以一次成功,而对于批量处理的逻辑就不太行。
一个基本的认知是:在未来较长的时间里(如1-2年),大模型本身的逻辑复杂度仍然不足以替代高级程序员。甚至极端一点,也许永远不能。
我的感觉是,一个大模型,类似于一个有非常多参数的函数。而我们的prompt,相当于是给到偏置(partial),然后去使用函数。大模型本身是具有多种能力的,但是只有偏置(把力量以某种方式集中)才能有效发挥这些能力。这些能力的发挥不再是呈现无限多样化,而是在某个领域的发挥,类似于人类"专注"时表现的特征:在一方面可以提高非常多,但是其他方面会加大削弱。例如狙击手,在瞄准目标,准备进攻时,他会放大他在注意力,肌肉协调的能力,但是对周围环境的感知大幅下降了(很容被偷袭)。
所以在应用智能体,分化智能体要考虑第一原则是:这个智能体是否可以胜任当前任务的复杂度。
2 群体智慧
这个最初我是在看一本游戏设计的书接触到的:个体本身很简单,但群体通过协作能产生复杂、智能的行为。
**群体智慧(Swarm Intelligence)**是一个研究 多个简单个体通过局部交互产生整体智能行为 的概念,属于 Artificial Intelligence 和 Complex Systems 的交叉领域。
群体智慧通常具有三个特征:
- 1 分布式个体:系统由大量个体组成(多个agent)
每个个体: 信息有限、规则简单、不知道全局状态
-
2 局部交互: 个体只与 邻居或环境交互,没有中央控制。
-
3 全局涌现(Emergence)
当大量个体交互时,会出现 宏观智能行为,这种现象称为 涌现(emergence),是复杂系统的核心特征。简单规则
↓
局部行为
↓
复杂系统行为
群体智慧的理解我觉得从游戏的角度是最好的,想想星际争霸,或者塞尔达传说。我们真正期待的是群体智慧的涌现,而其最大的限制是算力和时间。如果从取代人编程工作的角度来看,这些限制并不大。
实践
在进一步讨论openclaw的 agent swarm之前,我先说一下最近养虾的体会。
- 1 虾聊天的时候非常活泼,提供了很多情绪价值 - 所以模型偏置了多少能力在和人对接上?
- 2 由于IM通道,例如飞书,这让虾有了一个更加接近真实工作环境的机会 - Good
- 3 整体上虾做日常任务还可以,比如定时提醒等。 - 但是容易出现配置偏差,有时候会失效
- 4 虾能够自我配置,如果还不具备对应skill可以自己添加,也可以让它再创建新的agent,配置新的大模型等。 - 这种操作很不稳定,轻的问题是配置有偏差,重的话整个服务会崩溃。这种问题很频繁,我觉得偏置后的智能体(虾),在执行这个级别的任务(中等逻辑复杂度)已经不能胜任了;另外,如果要自我配置,应该有内核和外层的设计概念。我经常会用code buddy进行配置和软件问题修复,我感觉openclaw应该有个类似的agent内核,处理这些更新问题,用户在一般情况下访问的虾应该是外层应用。
总体上说,openclaw更多的体现了一种原型产品,而非最终产品的姿态。功能都有,但是需要不断debug,或者说不断偏置化,这个过程称为"养虾"。我认为理念都是对的,但是实现上是有改进空间,甚至重构必要的,所以我会在未来构建andybot。
Openclaw Agent Swarm
好了,前面前置的东西说完,我们先假定就必须用openclaw了,接下来看如何去实现Agent Swarm (Prototype)。
从模式上,openclaw的方式更像是半去中心化的。
bash
┌─────────────┐
│ Gateway │ ← 中央协调平面
└──────┬──────┘
│
┌─────────────┼─────────────┐
│ │ │
▼ ▼ ▼
Agent A ←→ Agent B ←→ Agent C
│
▼
可以直接通信
(通过 sessions_* 工具)
- Agent 间可以直接对话 --- 不需要用户作为中介
- 支持自主任务委派 --- 通过 sessions_spawn 派生子 Agent
- 分布式协作 --- 多个 Agent 可以并行处理不同任务
但它不是完全的去中心化(没有 P2P 直连),而是 Gateway 协调下的去中心化通信,这在安全性和可控性之间取得了平衡。
然后要进行agent swarm, 一定会有两个基本问题:
- 1 首先,一个协调者肯定是存在的,这个协调者可以产生新的agent 吗?
- 2 其次,要进行协作,除了在一个主题下有若干agent,这些agent怎么通信?
Agent
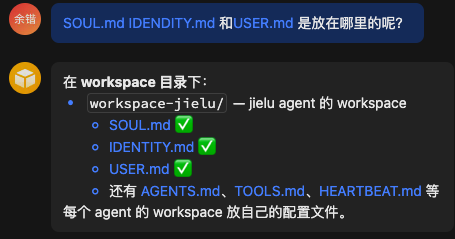
agent是openclaw里的核心元素,每个agent会有自己独立的存储空间,会有几个核心的文件:

这些是决定智能体底层特性,或者维护基本交互(USER.md)的基础。这也是一种偏置,如果用过python的partial包,看下面这段应该会比较认可。
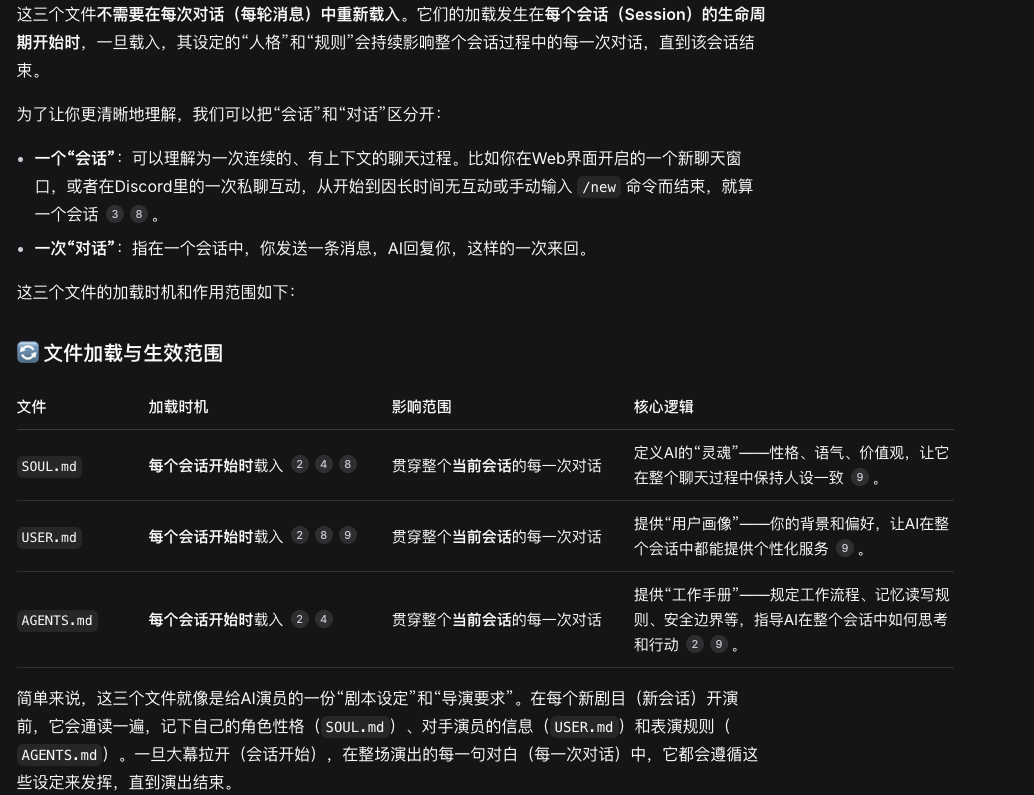
所以,每个agent可以看成一个人。一个openclaw只会有一个主agent(default),这个主agent会有点特殊,应该是只有他才能创建新agent(这个我没有求证过,但目前我成功的示例来看是这样)。通过主agent可以创建其他agent,但是风险很高,我在上面已经说过了。(轻则串台,重则服务甚至机器崩溃)
最好通过命令行来操作,这个也算低频操作
bash
列出所有 Agent
openclaw agents list
列出 Agent 及绑定关系
openclaw agents list --bindings
创建 Agent
openclaw agents add <agentId>
# 创建一个名为 "work" 的 Agent
openclaw agents add work
删除 Agent
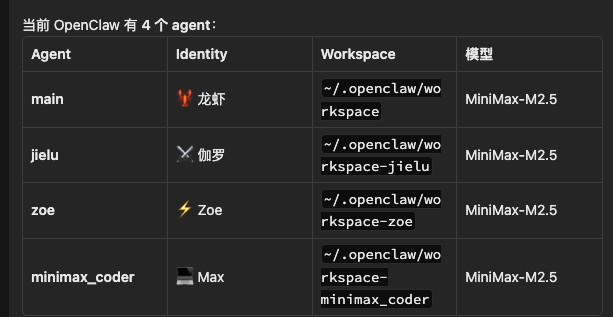
openclaw agents remove <agentId>我现在不在那台电脑身边,让主agent帮我查了一下。查询还是安全的操作。另外我注意到了,形成智能体模型也是一个重要的变量,这个应该会极大影响到智能体的表现。 偏置(IDENITY、SOUL) + 基础函数(LLM) = Agent
加入我要让zoe做编排者,看起来是ok的。另外,下面的问题就有点可怕,我要让主agent(当前飞书绑定)真的修改binding,搞不好会出问题。(这个也是我说的,openclaw应该有个内核,有少部分基础运行的操作不应该让所有智能体都能操作 - 自己修改自己 ~ 服务崩溃 )
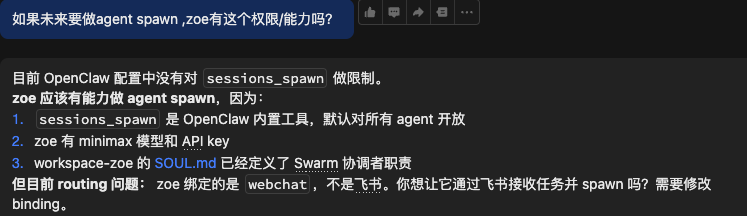
要让agent能有spawn的能力,需要进行设置。我问了cody buddy和openclaw自己,回复都是一样的(但我记得我试验时好像还有个啥设置)
code buddy:

openclaw:
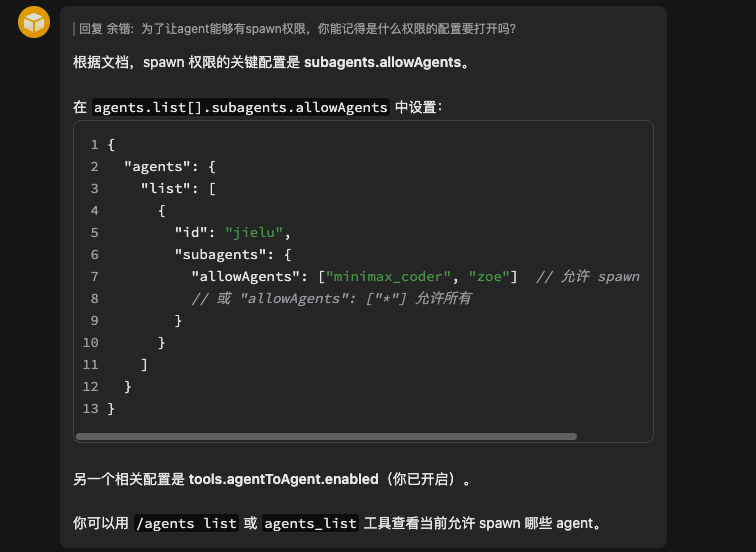
到这里,也就可以回答前面的问题
然后要进行agent swarm, 一定会有两个基本问题:
- 1 首先,一个协调者肯定是存在的,这个协调者可以产生新的agent 吗?
- 2 其次,要进行协作,除了在一个主题下有若干agent,这些agent怎么通信?我们再来看下,在openclaw中agent相关的一些信息,然后再过一个实验,验证一下
1 agent的基本资源/能力
创建了一个agent之后,会在基本配置文件中反应 ~/.openclaw/openclaw.json
json
# 创建一个名为 "work" 的 Agent
openclaw agents add work
{
agents: {
list: [
{
id: "work",
workspace: "~/.openclaw/workspace-work",
agentDir: "~/.openclaw/agents/work/agent"
}
]
}
}这里我是有点疑问的,之前我使用主agent直接创建,没用命令行;但我认为如果用了命令行,应该是可以直接在配置文件里修改,而不是需要手动改的。否则还不如直接用code buddy创建。
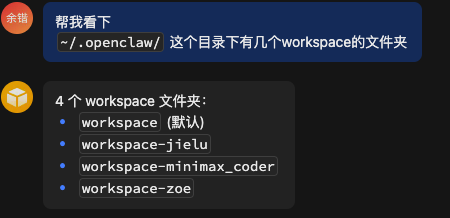
这个倒是验证的,每多创建一个agent,都多了一个文件夹
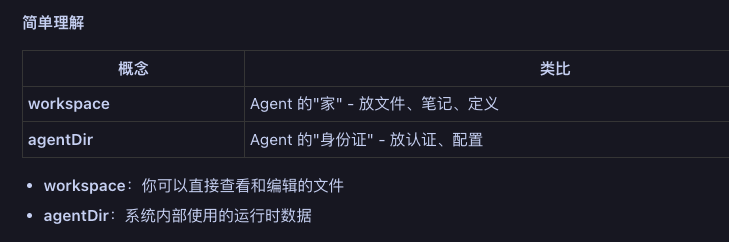
从这里可以看出来,workspace应该就是我们能操控的部分,包括设定agent的特点。
还有一个是agentDir, 存放runtime的相关内容。
位置藏的更深一些,一个agent一个文件

有趣的是,主agent的这个丢失了,但是没有影响使用。丢失的原因我估计就是之前让它自己配置,产生了毁坏性操作。
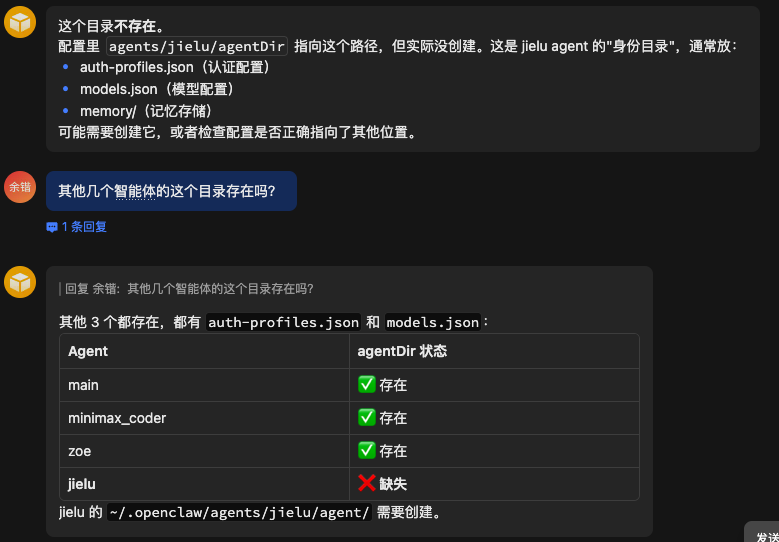
我让智能体自己修复了(这仍然是有操作安全隐患的,等于让智能体有干掉自己的机会)

这是cody buddy的内容,总结的应该比较好。
bash
用户想了解 agentDir 的具体作用。根据之前的对话,我已经提到了它主要存放认证信息、模型配置和会话历史。让我更详细地解释一下。
## agentDir 的作用
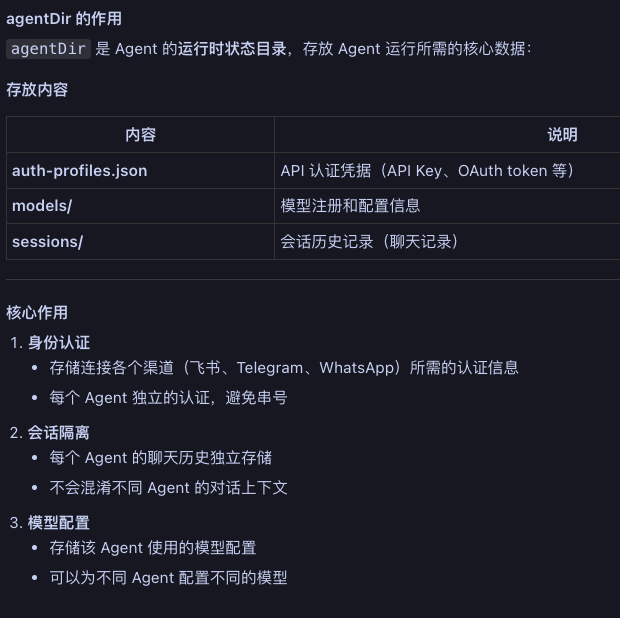
`agentDir` 是 Agent 的**运行时状态目录**,存放 Agent 运行所需的核心数据:
### 存放内容
| 内容 | 说明 |
|-----|------|
| **auth-profiles.json** | API 认证凭据(API Key、OAuth token 等) |
| **models/** | 模型注册和配置信息 |
| **sessions/** | 会话历史记录(聊天记录) |
---
### 核心作用
1. **身份认证**
- 存储连接各个渠道(飞书、Telegram、WhatsApp)所需的认证信息
- 每个 Agent 独立的认证,避免串号
2. **会话隔离**
- 每个 Agent 的聊天历史独立存储
- 不会混淆不同 Agent 的对话上下文
3. **模型配置**
- 存储该 Agent 使用的模型配置
- 可以为不同 Agent 配置不同的模型
---
### 简单理解agentDir = Agent 的"身份证 + 档案袋"
├── 身份证 → auth-profiles.json (认证凭据)
├── 档案袋 → sessions/ (历史记录)
└── 工作证 → models/ (模型配置)
---
### 为什么需要隔离
假设你有两个 Agent:
- **work**:用 Claude Opus,处理工作事务
- **home**:用 Claude Sonnet,处理生活问题
如果没有独立的 `agentDir`:
- ❌ 认证会串号
- ❌ 聊天历史会混在一起
- ❌ 模型配置会冲突
有了独立的 `agentDir`:
- ✅ 每个 Agent 有自己的认证
- ✅ 历史记录清晰隔离
- ✅ 可以用不同模型我又看了下,基本可以认为agentDir是放智能体的认证信息和模型信息的,以及保存会话历史。
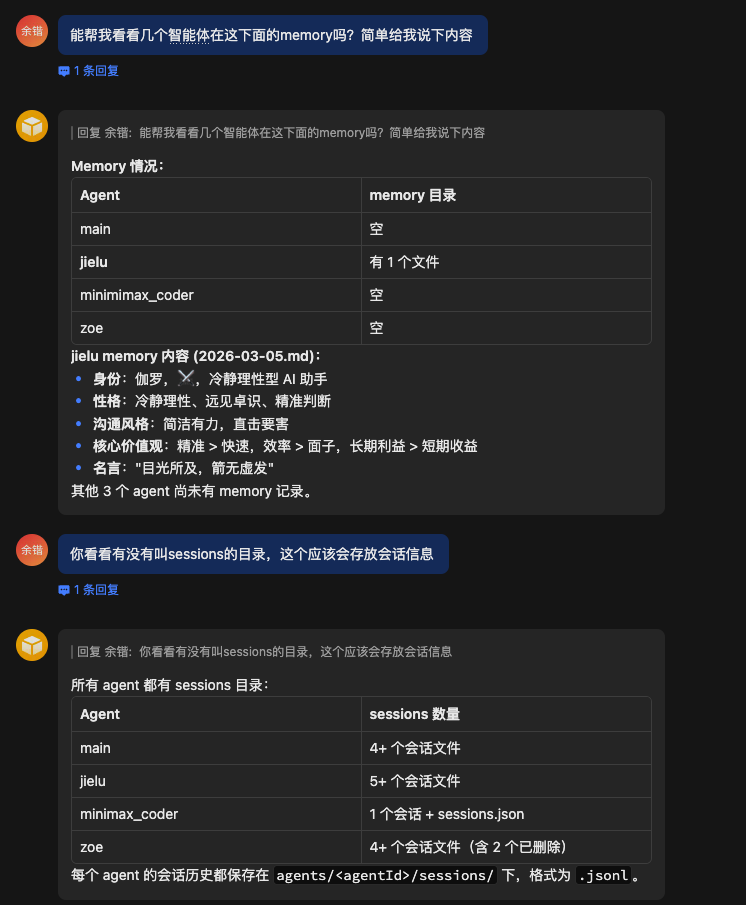
这块可以认为是智能体对内(openclaw)和对外(外部网站、api)的渠道。
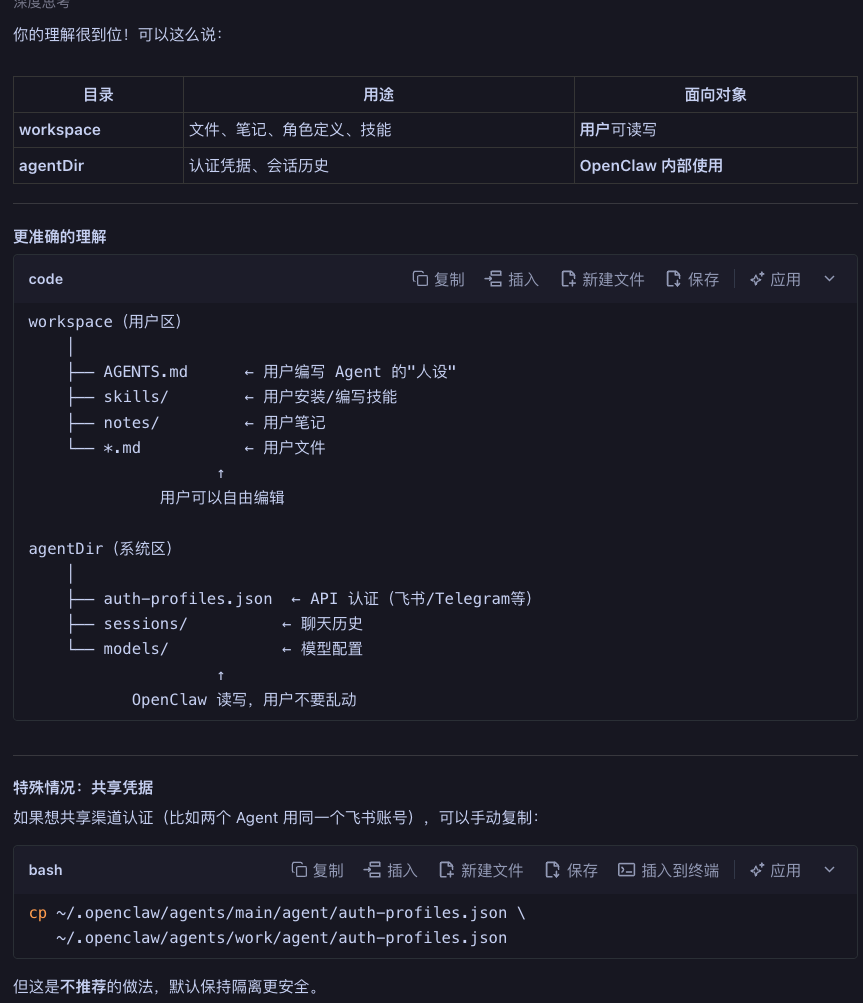
小总结
bash
workspace(用户区)
│
├── AGENTS.md ← 用户编写 Agent 的"人设"
├── skills/ ← 用户安装/编写技能
├── notes/ ← 用户笔记
└── *.md ← 用户文件
↑
用户可以自由编辑
agentDir(系统区)
│
├── auth-profiles.json ← API 认证(飞书/Telegram等)
├── sessions/ ← 聊天历史
└── models/ ← 模型配置
↑
OpenClaw 读写,用户不要乱动2 核心机制-会话隔离
会话是连接两端节点(Agent)的,相当于一条边
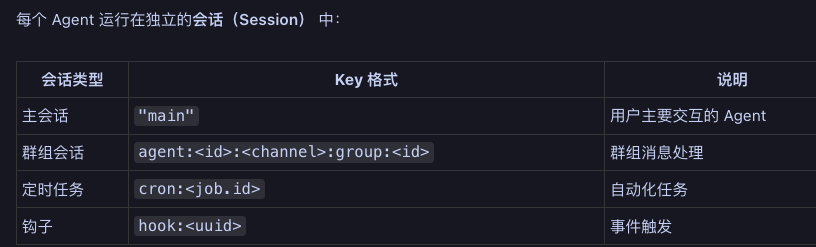
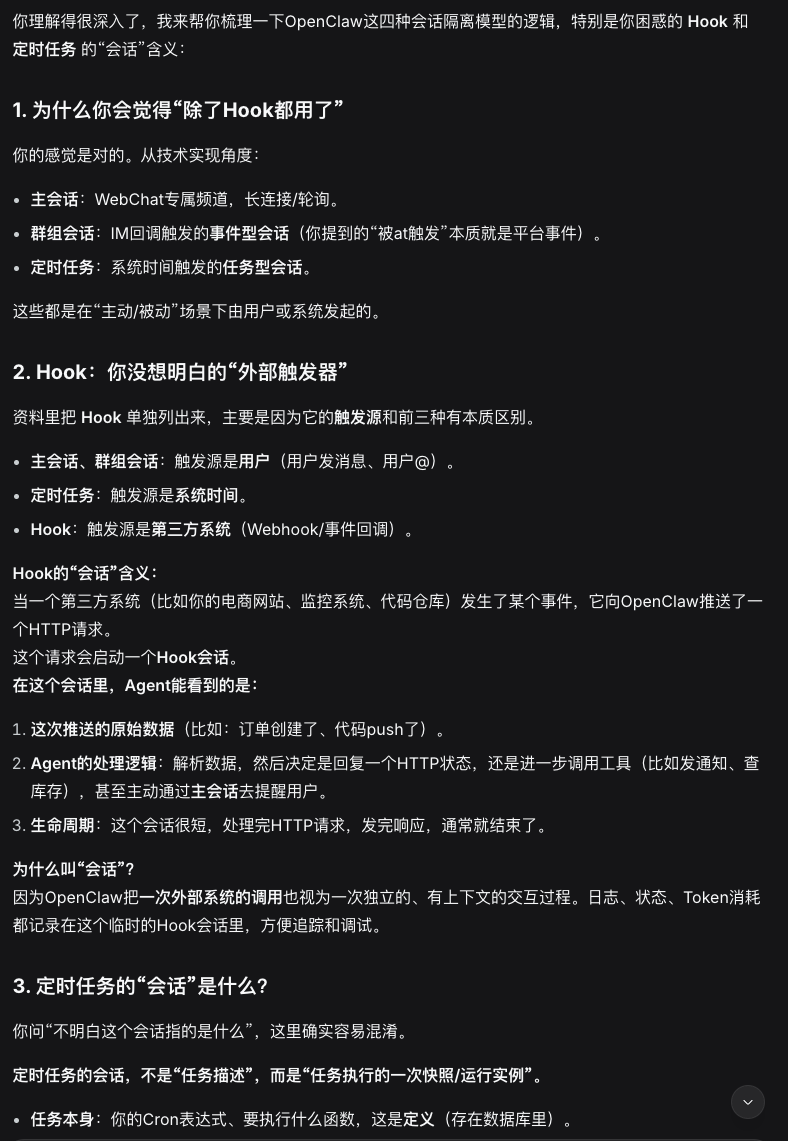
我看资料有这四种,理论上除了hook,我应该都用了。hook这个我还没想明白。
只要建立了一个智能体,那么在webchat上就会有一个对应的专属channel,默认是连接agent和用户的。然后这个会话如果隔一段时间没消息,就会休眠。
群组会话应该就是类似飞书的方式,把agent加到一个组里聊天,当被at到的时候,对应的agent就会被触发。这个应该是应用了IM软件的事件,某种程度上说也是hook。比较有意思的是,大约是因为IM软件的机器人相当于一个应用服务,通过ws和openclaw智能体建立的长期的双向连接,所以这个会话似乎是不会退出的。
定时任务我也跑了,这个我倒没想那么多,不明白这个会话指的是什么:难道是执行任务期间,所有的日志都留在里面?还是说任务的描述?
我让deepseek解释了一下,说的挺好:
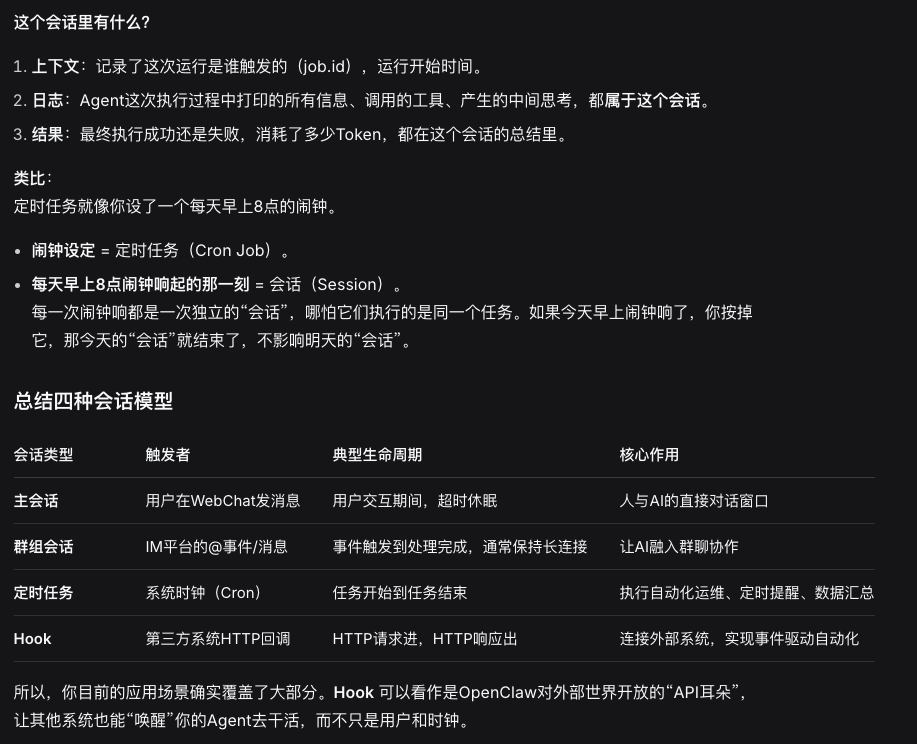
总结一下:会话是隔离的,一个agent可以有多个会话;会话不仅是传统的人机对话,也包含了机器之间实时的或者定时的会话过程。
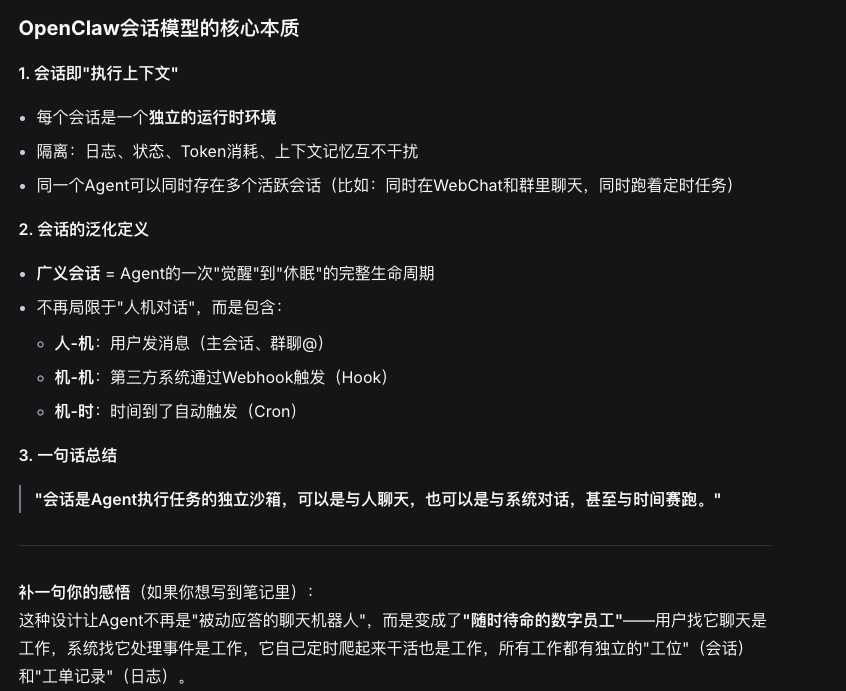
从这边文章研究的目的来说:会话,是驱动智能体的唯一方式。
3 跨会话通信工具
通过跨会话工具,那么协调者(主Agent)就可以调起子Agent(Spawn)

另外还有一个东西挺有趣,我也经历过:我在飞书渠道让主智能体传递消息给另一个智能体,就会引起两个智能体之前的互相对话,但是经过几个轮次就被信号终止。

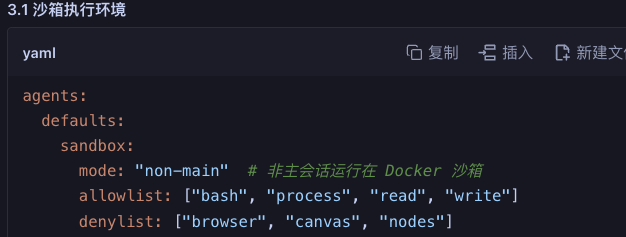
4 安全隔离机制
主要是采取沙箱机制,非主Agent都运行在沙箱,我就简单把沙箱和docker容器划等号了。
5 多 Agent 协作模式
这反正没啥好说,从图的角度来看没啥特别(所以也理解为啥叫LangGraph)

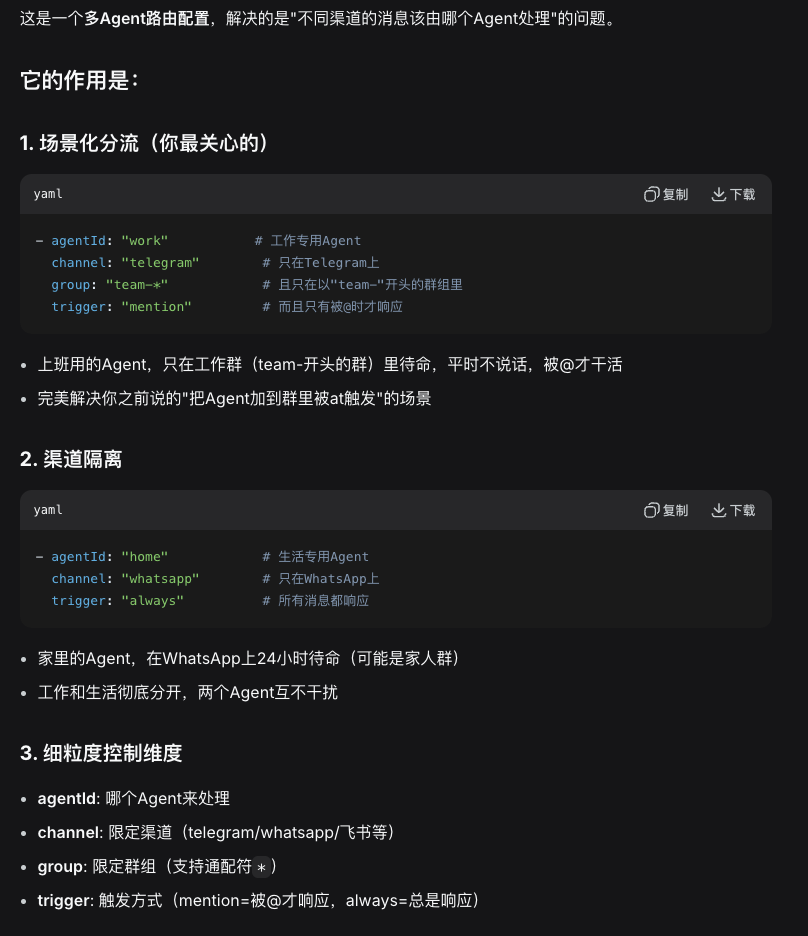
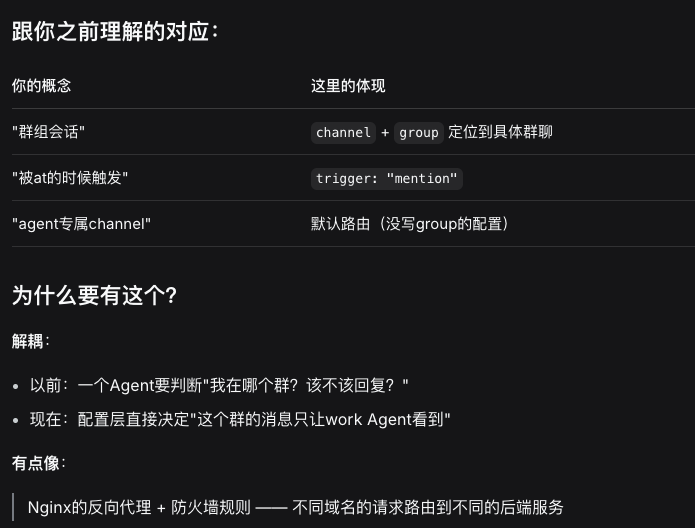
6 路由配置
这个我还没有get干啥的

我问了下deepseek,感觉就像是个静态网关(未来我做的smartlink对应这个)
结束
OpenClaw 的 Agent Swarm 实现有以下几个核心特点:
-
轻量级设计:不引入复杂的分布式架构,而是通过会话(Session)+ 工具(Tools)实现 Agent 协作
-
灵活的路由机制:支持基于渠道、群组、触发条件的精细路由
-
安全优先:沙箱隔离、可见性控制、发送策略等多层安全防护
-
同步/异步通信:既支持 sessions_send 的同步等待回复,也支持 sessions_spawn 的异步任务委派
-
工作区共享:所有 Agent 共享 ~/.openclaw/workspace,便于协作处理文件和数据
这种设计使得构建和管理多 Agent 系统变得简单而安全,非常适合个人 AI 助手场景。
其实还有一些想法,不过收获不少,这次先结束吧,后续看看再怎么写。