OpenClaw龙虾很火,没想到都这么火。其实龙虾的硬件生态如果能够打通,将更有实用价值。万物互联,所有硬件都能接入成为它的skills。智能硬件才是拓展它能力的边界,否则电脑上纯软件的东西能玩出多少花儿来。接入硬件相当于给了他一双可以触达现实世界的手,才能真正发挥了价值,完成现实世界的连接。
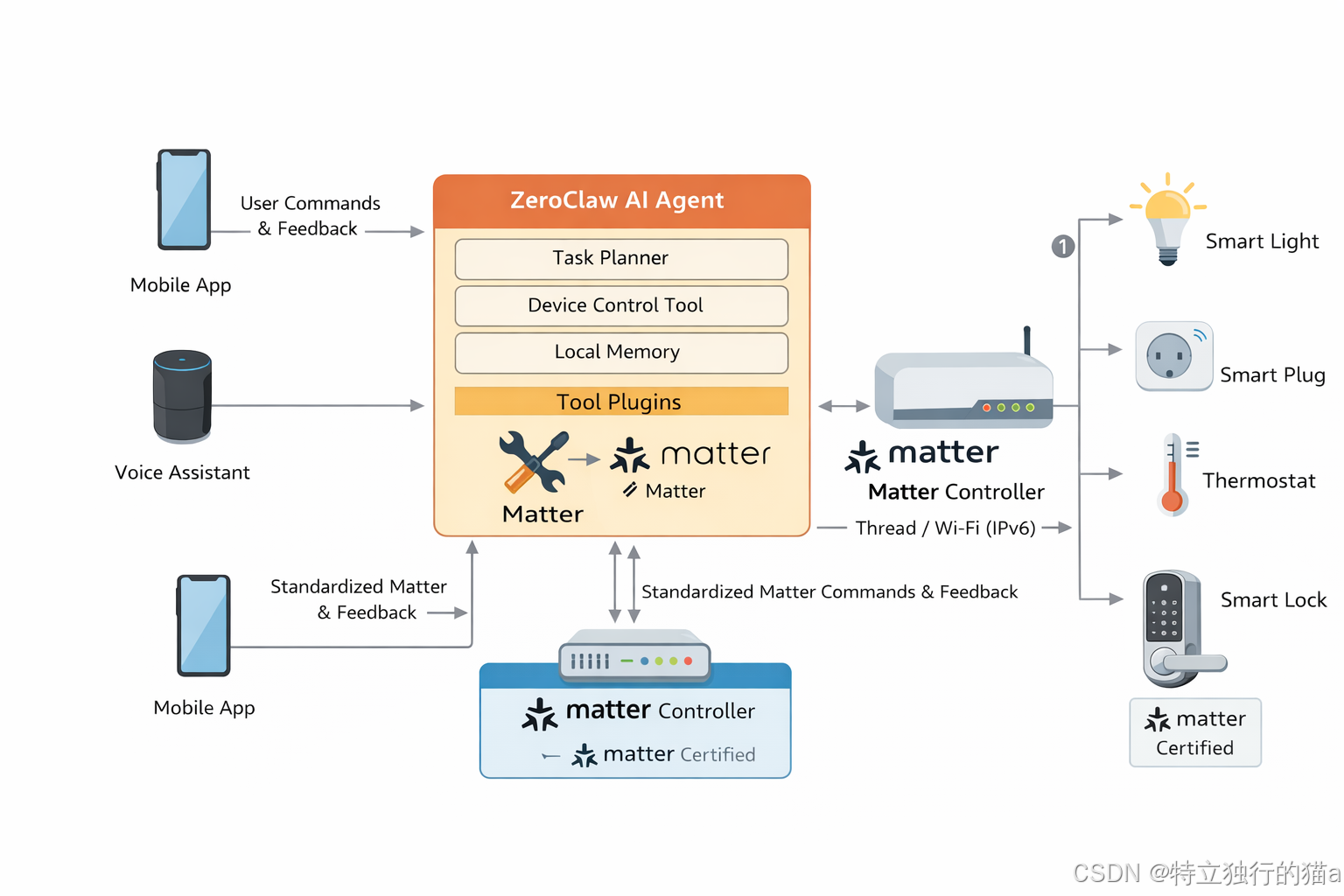
本文旨在设计一种从 AI 助手到现实世界链接的一种方案:OpenClaw + Matter 的智能硬件控制架构设计,抛砖引玉。分享给同样感兴趣的小伙伴,共同探讨这一方案实现。
这个硬件生态一旦起来,这个方向会爆发。为什么?
因为AI一旦连接硬件,价值指数级增长:

过去几年,大模型和 AI Agent 迅速发展,AI 在文本、代码、数据处理等数字世界中展现出了强大的能力。
但如果仔细观察会发现:
大多数 AI Agent 仍然停留在"软件世界"。
它们能:
- 写文案
- 整理表格
- 搜索信息
- 自动化办公流程
但这些能力仍然局限在电脑内部。
如果 AI 想真正改变现实世界,它必须具备一种能力:
控制和调度现实世界的设备。
换句话说:AI 需要一双能够触达现实世界的"手"。
当 AI 可以控制:
- 灯光
- 门锁
- 机器人
- 3D打印机
- 无人机
- 工业设备
AI 就不再只是"数字助手",而是成为一个现实世界的执行代理(Agent)。
然而现实世界存在一个非常大的问题:
硬件极度碎片化。
不同设备使用:
- 不同通信协议(Zigbee / BLE / UART / Modbus)
- 不同控制接口
- 不同厂商 SDK
这使得 AI 很难统一控制这些设备。
因此,要实现真正的 AI 驱动万物(AI-driven Everything),必须解决两个关键问题:
- 设备互联标准化
- 设备能力抽象化
本文将提出一个完整的工程方案:
OpenClaw + Matter + ROS2 + MQTT 的 AI 硬件控制架构
该架构的目标是:
让 AI Agent 能够统一控制现实世界设备,构建一个"现实世界的操作系统"。
一、总体设计思想
系统的核心思想可以概括为三点:
1 硬件必须成为"网络实体"
传统设备:
设备 → 串口 → 驱动 → 程序新的模式:
设备 → 网络实体 → API → AI Agent设备必须具备:
- 网络地址
- 设备身份
- 可调用能力
2 AI 不控制设备,而是调用能力
AI 不应该理解各种设备协议。
AI 只需要调用 能力(Capability)。
例如:
light.turn_on()
robot.move_to()
camera.detect()
printer.print()设备协议被隐藏在系统内部。
3 分层架构解决碎片化
系统采用分层设计:
AI Agent Layer
↓
Skill / Capability Layer
↓
Protocol Adapter Layer
↓
Device Network
↓
Physical Devices这样 AI 就可以统一调用设备。
二、系统总体架构
下面是完整的工程架构图:
┌──────────────────────────────┐
│ User │
│ Chat / Voice / API / App │
└──────────────┬───────────────┘
│
▼
┌──────────────────────────────┐
│ OpenClaw Agent │
│ │
│ LLM Planner │
│ Task Decomposition │
│ Tool / Skill Executor │
└──────────────┬───────────────┘
│
▼
┌──────────────────────────────────────────┐
│ Hardware Skill Adapter Layer │
│ │
│ light.turn_on() │
│ sensor.read() │
│ robot.move_to() │
│ drone.takeoff() │
└──────────────┬───────────────┬───────────┘
│ │
▼ ▼
┌───────────────────────┐ ┌───────────────────────┐
│ Matter Adapter │ │ ROS2 Adapter │
│ │ │ │
│ Cluster → Skill │ │ ROS Service → Skill │
│ Device Discovery │ │ Robot Action Client │
└──────────────┬────────┘ └──────────────┬────────┘
│ │
▼ ▼
┌─────────────────────────────────────────────────┐
│ Control Bus Layer │
│ │
│ Matter Fabric │
│ MQTT Event Bus │
│ ROS2 DDS Communication │
└───────────────┬───────────────────────┬─────────┘
│ │
▼ ▼
┌─────────────────────────┐ ┌─────────────────────────┐
│ Matter Devices │ │ ROS2 Robots │
│ │ │ │
│ Smart Lights │ │ Robot Arm │
│ Smart Locks │ │ Mobile Robot │
│ Thermostats │ │ Drone │
│ Sensors │ │ Autonomous Vehicle │
└──────────────┬──────────┘ └──────────────┬──────────┘
│ │
▼ ▼
┌─────────────────┐ ┌─────────────────┐
│ Matter Bridge │ │ ROS Hardware │
│ │ │ Drivers │
│ Zigbee │ │ Motor Drivers │
│ BLE │ │ Camera Drivers │
│ Serial │ │ Sensor Drivers │
└────────┬────────┘ └────────┬────────┘
│ │
▼ ▼
┌──────────────────────────────────────────┐
│ Physical Devices │
│ │
│ Lights / Cameras / Locks / Sensors │
│ Robot Arms / Drones / CNC / Vehicles │
│ Arduino / Raspberry Pi / PLC │
└──────────────────────────────────────────┘方案实现框图:
三、核心技术组件
1 OpenClaw Agent(AI 调度核心)
OpenClaw 是整个系统的大脑。
主要负责:
- 用户意图理解
- 任务分解
- 设备能力调度
例如用户说:
把桌子上的杯子放到洗碗机AI 会自动分解任务:
camera.detect(cup)
robot_arm.move_to()
robot_arm.grab()
robot_arm.move_to(dishwasher)
robot_arm.release()AI 只调用能力,而不关心设备细节。
四、Hardware Skill Adapter(设备能力层)
这一层负责:
把设备能力转换为 AI Skill。
例如:
| 设备 | AI Skill |
|---|---|
| 灯 | light.turn_on |
| 摄像头 | camera.detect |
| 机械臂 | robot.move_to |
| 无人机 | drone.takeoff |
AI 通过 Skill 调用设备。
五、Matter 设备互联层
Matter 是当前最重要的智能家居互联标准之一。
它解决了三个关键问题:
- 设备发现
- 设备认证
- 多厂商互通
Matter 的通信基于 Cluster 模型。
例如:
| Cluster | 功能 |
|---|---|
| OnOff | 开关 |
| LevelControl | 亮度 |
| DoorLock | 门锁 |
| Temperature | 温度 |
系统会把 Cluster 映射为 Skill:
OnOffCluster → light.turn_on()
DoorLockCluster → lock.open()六、ROS2 机器人系统
对于机器人设备,系统采用 ROS2。
ROS2 提供:
- 机器人通信
- 传感器数据
- 运动控制
例如:
/move_base action会被映射为:
robot.move_to(x,y)这样 AI 就可以直接控制机器人。
七、MQTT 事件总线
IoT 设备通常使用 MQTT。
MQTT 用于:
- 设备状态
- 传感器数据
- 事件通知
例如:
/sensor/temp
/sensor/motionAI 可以订阅这些事件。
八、Matter Bridge(旧设备接入)
现实世界中大量设备不是 Matter。
需要 Bridge 转换:
| 原协议 | 转换 |
|---|---|
| Zigbee | Zigbee → Matter |
| BLE | BLE → Matter |
| Serial | Serial → Matter |
| Modbus | Modbus → Matter |
这样旧设备也能接入系统。
九、典型控制流程
智能家居控制
用户:
把客厅灯打开执行流程:
User
↓
OpenClaw
↓
light.turn_on()
↓
Matter Controller
↓
OnOffCluster.On()
↓
灯打开机器人任务
用户:
移动桌子上的杯子执行流程:
OpenClaw
↓
camera.detect()
↓
robot_arm.move_to()
↓
robot_arm.grab()
↓
robot_arm.move_to()
↓
robot_arm.release()十、最小可运行系统(MVP)
一个最小系统只需要:
组件:
OpenClaw Agent
Matter Controller
ROS2 Robot
MQTT Broker设备:
Matter 灯
ROS2 机械臂
摄像头即可实现:
AI → 控制家居
AI → 控制机器人十一、未来扩展方向
如果继续发展,这个系统可以升级为:
AI Physical Internet(物理互联网)
现实世界的能力将变成:
计算资源 → 云计算
物理能力 → 物理云例如:
fabricate(object)
transport(object)
inspect(object)AI 会自动寻找:
- 最近的机器人
- 最近的打印机
- 最近的仓库
并执行任务。
总结
本文提出了一套完整的 AI 硬件控制架构:
OpenClaw + Matter + ROS2 + MQTT系统通过 分层设计 解决了硬件碎片化问题:
| 层 | 技术 |
|---|---|
| AI Agent | OpenClaw |
| 设备互联 | Matter |
| 机器人系统 | ROS2 |
| IoT通信 | MQTT |
这种架构带来的意义非常大:
- AI 不再局限于软件世界
- 设备能力可以被 AI 调度
- 现实世界成为可编程系统
最终形态可能是:
Human
↓
AI Agent
↓
Capability Graph
↓
Device Network
↓
Physical World届时:
AI 将成为现实世界的操作系统。 类似:Android 管理手机,Kubernetes 管理服务器。而这里:AI 管理现实设备。全部变成 一个全球 AI 可调用的计算网络。那会是 AI时代最大的基础设施之一。