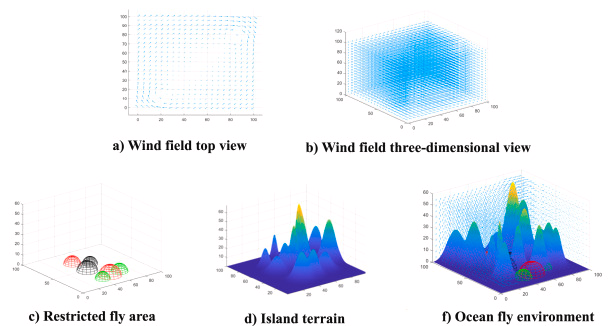
利用Lamb-Ossen模型模拟海风,构建了含海风的3D近海环境模型。其次,本文综合考虑海风、无人机间距等因素,提出了多无人机路径代价函数。同时,提出了一种引导式协同控制机制,形成了一种新颖的多无人机协同路径规划方法。此外,多无人机路径求解采用改进的多维Coati优化算法(MDCOA),通过Levy飞行、微分算子、动态对向学习设计新策略,增加协方差矩阵学习(CML)阶段扩展搜索视角,最后利用MDCOA算法求解不同海上仿真场景下的多无人机路径,算法得到的路径降低了路径代价,与其他算法相比表现出优异的性能。
1. 面向海洋多无人机路径规划的提出算法
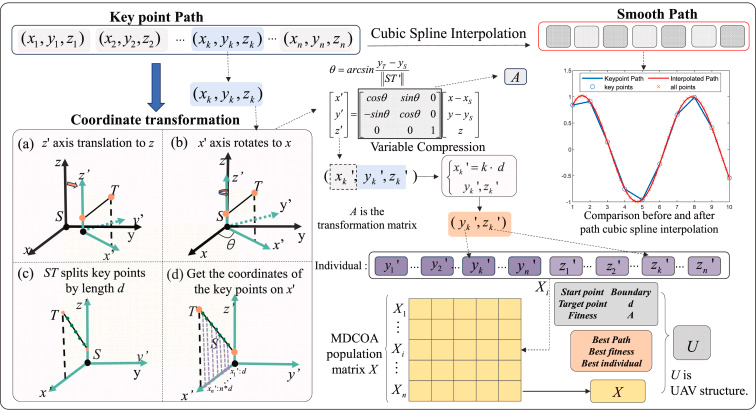
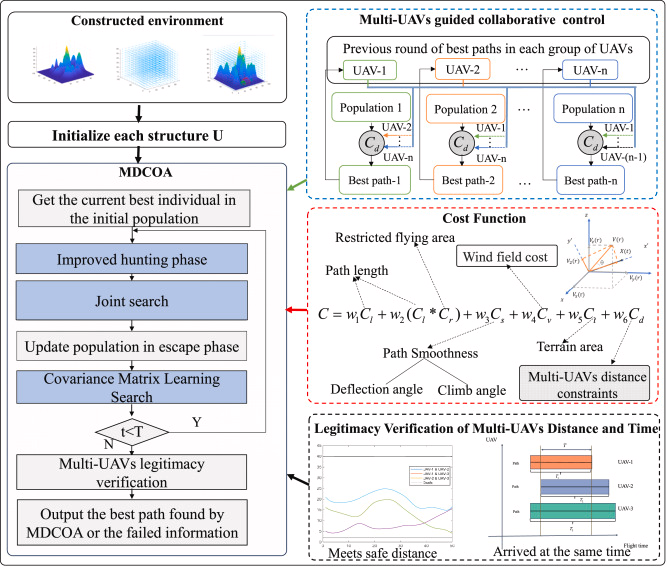
本节首先介绍了多无人机路径规划问题中涉及的约束条件。随后,提出了用于评估路径质量的成本函数,并阐述了在路径规划方法框架下将三维空间中的路径映射为种群中个体的方法。此外,讨论了群体智能算法解决路径规划问题的基本思想,并详细描述了所提出的引导协同控制方法。最后,介绍了多无人机路径规划方法的整体流程。
1.1. 无人机性能约束
1.1.1. 飞行速度约束
无人机飞行速度约束指的是无人机在飞行过程中能够达到的速度范围。无人机的动力系统限制了其能够达到的最大速度。设计用于携带大载荷或长时间飞行的无人机通常为固定翼类型,因为它们需要保持最小速度以维持升力。因此,在完成飞行任务过程中,对无人机的飞行速度存在约束。本研究中,无人机速度设置因场景而异,详细设置见第5.1节。
1.1.2. 最大偏航角约束
由于空气动力学以及无人机推进和控制系统施加的限制,飞行过程中存在最大偏航角约束。如果为无人机规划的路径超过此最大偏航角,无人机将无法按照规划路线飞行,这可能导致潜在的危险事件。因此,在路径规划中,无人机的偏转角和爬升角应对其路径施加约束。无人机的最大偏转角和最大爬升角均设置为45°。
4.1.3. 最大通信距离和最小安全距离约束
受无人机通信模块性能的影响,当无人机之间的距离超过一定范围时,它们将无法相互通信,这对搜索和救援任务是不利的。此外,无人机的尺寸、机动性和响应时间等因素可能导致无人机之间发生碰撞。因此,在路径规划过程中,需要考虑无人机之间的通信和避碰。本研究中,无人机之间的最小距离设置为3 km,最大距离设置为40 km。
1.2. 多无人机协同约束
本节阐明了多无人机协调需要控制的内容。与单无人机路径规划不同,多无人机路径规划需要路径检测机制来完成无人机之间距离和时间的协同控制。无人机飞向搜索和救援位置的协同控制涉及无人机之间的距离以及所有无人机同时到达目标位置所需的飞行时间。
1.2.1. 距离约束
由于无人机通信性能和机动能力的限制,为确保有效通信并防止碰撞,任意两架无人机之间的距离必须保持在预定义范围内------既不超过最大阈值以避免通信中断,也不低于最小阈值以防止碰撞。无人机之间的距离通过计算相应路径关键点之间的距离获得。当任意路径点之间的距离小于最短安全距离或大于通信范围时,无人机路径之间的距离被判定为非法。式(30)给出了计算无人机之间距离的公式(Niu等,2023a)。
dj,k=(xj(e)−xk(f))2+(yj(e)−yk(f))2+(zj(e)−zk(f))2(30)d_{j,k}=\sqrt{\left(x_{j}\left(e\right)-x_{k}\left(f\right)\right)^{2}+\left(y_{j}\left(e\right)-y_{k}\left(f\right)\right)^{2}+\left(z_{j}\left(e\right)-z_{k}\left(f\right)\right)^{2}}\tag{30}dj,k=(xj(e)−xk(f))2+(yj(e)−yk(f))2+(zj(e)−zk(f))2 (30)
dj,kd_{j,k}dj,k表示第jjj条无人机路径与第kkk条无人机路径之间的距离矢量,eee和fff分别表示第jjj条候选路径的第eee个路径点和第kkk条路径的第fff个路径点,其中jjj不等于kkk。在后续引入时间限制后,只需计算路径点e=fe=fe=f时是否满足无人机之间距离的合法性。
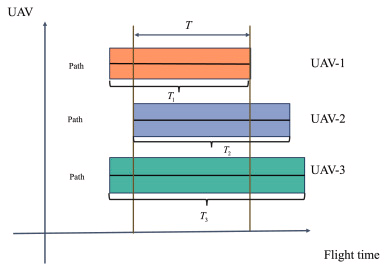
1.2.2. 时间约束
当多无人机协同工作时,同时到达指定区域进行协同搜索可以有效提高搜索区域的有效搜索覆盖率。这个问题需要在多无人机的路径规划阶段解决。为确保多架无人机能够尽快到达目的地,本文根据无人机的速度约束计算最短到达时间。通过将此最短时间与规划路径长度相结合,确定每架无人机的飞行速度,确保所有无人机在遵守其速度性能限制的同时同时到达目标(Niu等,2023a)。由于海上搜索和救援任务的紧迫性,无人机的到达时间应为可行选项中最短的。
多无人机中的每架无人机都有一个最快速度和一个最慢速度。通过这个速度范围,可以计算每架无人机路径所需的飞行时间间隔。形式化描述如式(31)。
Ti∈Divi,max,Divi,min(31)T_{i}\in\left\\frac{D_{i}}{v_{i,max}},\\frac{D_{i}}{v_{i,min}}\\right\tag{31}Ti∈vi,maxDi,vi,minDi(31)
这里,TiT_{i}Ti表示第iii架无人机的合规时间范围,DiD_{i}Di表示第iii架无人机的路径长度,vi,maxv_{i,max}vi,max表示第iii架无人机的最大飞行速度,vi,minv_{i,min}vi,min表示第iii架无人机的最小飞行速度。
在获得所有无人机的合规飞行时间间隔后,取它们的交集以获得多无人机的合规飞行时间间隔。在此范围内到达目标点的飞行时间可以通过分配无人机飞行速度来实现同时到达目标点的要求。能够同时到达的飞行时间间隔由式(32)给出。
T=(T1∩T2∩⋯Tp)(32)T=\left(T_{1}\cap T_{2}\cap\cdots T_{p}\right)\tag{32}T=(T1∩T2∩⋯Tp)(32)
1.3. 目标函数
在海上环境的路径规划问题中,海风对无人机的影响不可忽视。此外,在路径规划过程中还应考虑沿海场景中的岛屿地形。此外,较短的路径长度和避障是路径规划的基本要求。所有这些因素都可以被视为路径规划问题中的优化目标。此外,无人机运行的环境以及无人机的性能都对其飞行路径施加了一定的约束,这提供了基本的限制条件。基于这些因素,我们参考了Niu等人(2023a)的工作,并在他们研究的基础上,设计了海风成本和无人机间距离的成本计算方法。据此,设计了如下的成本函数,如式(33)所示:
C=w1C1+w2(C1∗Cr)+w3Cs+w4Cv+w5Ct+w6Cd(33)C = w_1 C_1 + w_2 (C_1 * C_r) + w_3 C_s + w_4 C_v + w_5 C_t + w_6 C_d \tag{33}C=w1C1+w2(C1∗Cr)+w3Cs+w4Cv+w5Ct+w6Cd(33)
在式(33)中,w1,w2,w3,w4,w5w_1, w_2, w_3, w_4, w_5w1,w2,w3,w4,w5 和 w6w_6w6 是各部分函数的成本函数参数。成本函数 C1,Cs,Cr,Cv,CtC_1, C_s, C_r, C_v, C_tC1,Cs,Cr,Cv,Ct 和 CdC_dCd 旨在实现各种约束条件。具体来说,C1C_1C1 代表路径长度成本,评估无人机的飞行距离;CsC_sCs 是路径平滑度成本,评估无人机轨迹的平滑度;CrC_rCr 是限制空域成本,衡量到无人机飞行区域的距离;CvC_vCv 是海风成本,说明海风对无人机路径的影响;CtC_tCt 是岛屿威胁成本,为无人机施加关于岛屿地形的避障约束;CdC_dCd 是无人机间距离成本,衡量多无人机的协同约束。下面详细介绍这些函数。
1.3.1. 路径长度
无人机的路径长度是无人机路径规划问题中的主要评价标准之一。较短的路径可以减少无人机在飞行过程中的能量消耗,也缩短了到达搜救区域所需的时间。路径长度可以通过相邻路径点之间的欧几里得距离来计算,可用式(34)描述:
Cl=∑j=1n−1∥RjRj+1∥Rj(34)C_l = \sum_{j=1}^{n-1} \frac{\|R_j R_{j+1}\|}{R_j} \tag{34}Cl=j=1∑n−1Rj∥RjRj+1∥(34)
在式(34)中,RjRj+1R_j R_{j+1}RjRj+1 表示相邻路径点的向量,∥RjRj+1∥\|R_j R_{j+1}\|∥RjRj+1∥ 表示距离向量的模,nnn 表示路径点的数量。
1.3.2. 路径平滑度
本文通过评估偏转角和爬升角来衡量路径平滑度。受实际动力学条件约束,无人机的飞行机动性能对路径的平滑度提出了要求。超过无人机飞行能力的路径在实际中是不可行的,这对路径偏差角施加了最大限制,因此在计算转弯角时,存在最大转弯角的约束。其平滑度的计算公式如式(35)所示:
Cs=∑j=1n−1θj+∑j=1n−1φj(35)C_s = \sum_{j=1}^{n-1} \theta_j + \sum_{j=1}^{n-1} \varphi_j \tag{35}Cs=j=1∑n−1θj+j=1∑n−1φj(35)
式(35)中符号的解释如下:nnn 是路径点的总数,θj\theta_jθj 和 φj\varphi_jφj 分别表示第 jjj 个路径点处的偏转角和爬升角。
(1)偏转角
偏转角是在水平方向上偏离原始航向的角度,可以通过式(36)计算:
θj=arctan(∥RjRj+1∥⋅Rj+1Rj+2∥RjRj+1∥⋅Rj+1Rj)(36)\theta_j = \arctan \left( \frac{\|R_j R_{j+1}\| \cdot R_{j+1} R_{j+2}}{\|R_j R_{j+1}\| \cdot R_{j+1} R_j} \right) \tag{36}θj=arctan(∥RjRj+1∥⋅Rj+1Rj∥RjRj+1∥⋅Rj+1Rj+2)(36)
在式(36)中,RjRj+1R_j R_{j+1}RjRj+1 是前进向量在 OxyOxyOxy 平面上的投影向量,θmax\theta_{max}θmax 是允许的最大偏差角。
(2)爬升角
爬升角是无人机从当前水平面上升或下降的角度,可以使用式(37)计算:
φj=arctan(zj+1−zj∥RjRj+1∥)(37)\varphi_j = \arctan \left( \frac{z_{j+1} - z_j}{\|R_j R_{j+1}\|} \right) \tag{37}φj=arctan(∥RjRj+1∥zj+1−zj)(37)
在式(37)中,∥RjRj+1∥\|R_j R_{j+1}\|∥RjRj+1∥ 是相邻路径点的位置向量,zjz_jzj 是第 jjj 个路径点的 zzz 轴分量,φmax\varphi_{max}φmax 是最大爬升角限制。
1.3.3. 风成本
通过利用已知的海风矢量信息,并将其投影到无人机飞行路径的切向和法向,可以判断海风在切向和法向上的强度对飞行的影响。这有助于评估海风是否能为无人机提供帮助。式(38)用于计算海风强度,而式(39)将海风强度投影到路径的切向和法向上(Zhang and Shi, 2023)。然而,由式(39)计算出的值可能为负。为了标准化成本函数,使用式(40)将其重新映射到一个合理的区间。
Vk(r)=Vx(r)2+Vy(r)2+Vz(r)2(38)V_k (r) = \sqrt{V_x (r)^2 + V_y (r)^2 + V_z (r)^2} \tag{38}Vk(r)=Vx(r)2+Vy(r)2+Vz(r)2 (38)
C~v=−∑k=1n−1(Vk(r)⋅cosθ−Vk(r)⋅sinθ)(39)\tilde{C}v = -\sum{k=1}^{n-1} (V_k (r) \cdot \cos \theta - V_k (r) \cdot \sin \theta) \tag{39}C~v=−k=1∑n−1(Vk(r)⋅cosθ−Vk(r)⋅sinθ)(39)
Cv=a−a1+e−bck(40)C_v = a - \frac{a}{1+e^{-\frac{b}{c_k}}} \tag{40}Cv=a−1+e−ckba(40)
在式(38)中,Vk(r)V_k (r)Vk(r) 表示第 kkk 个路径点处的海风强度,θ\thetaθ 表示路径前进方向与海风方向之间的夹角,ppp 表示路径点的总数,Vk(r)∗cos(θ)V_k (r) * \cos (\theta)Vk(r)∗cos(θ) 和 Vk(r)∗sin(θ)V_k (r) * \sin (\theta)Vk(r)∗sin(θ) 分别表示海风在飞行路径切向和法向上对无人机飞行的影响。前进方向上的分量用于衡量海风对无人机飞行造成的阻力或助力,垂直于前进方向的分量用于衡量海风对无人机造成的偏航效应。海风成本计算的示意图如图4所示。
1.3.4. 限制飞行区域
本文将无人机路径点到限制飞行区域中心的距离作为自变量,设计了一个成本函数来表示进入限制飞行区域的成本,如式(41)所示:
Cr=∑j=1n−1lj∗mean(∑i=1n−1(e−xi⋅(1−di,0Rj)+e−xi⋅(1−di,1Rj)))(41)C_r = \sum_{j=1}^{n-1} l_j * \text{mean} \left( \sum_{i=1}^{n-1} \left( e^{-x_i} \cdot \left( 1 - \frac{d_{i,0}}{R_j} \right) + e^{-x_i} \cdot \left( 1 - \frac{d_{i,1}}{R_j} \right) \right) \right) \tag{41}Cr=j=1∑n−1lj∗mean(i=1∑n−1(e−xi⋅(1−Rjdi,0)+e−xi⋅(1−Rjdi,1)))(41)
在式(41)中,ljl_jlj 表示无人机路径点到限制飞行区域中心的平均距离,di,0d_{i,0}di,0 和 di,1d_{i,1}di,1 分别是无人机路径点到限制飞行区域中心的最小和最大距离。该成本函数是基于海风强度以及无人机路径点到限制飞行区域中心的距离设计的。
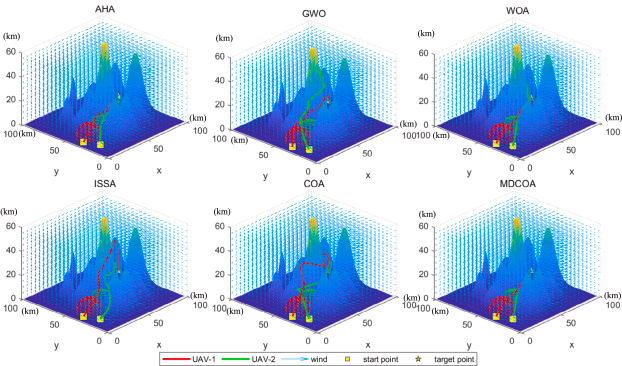
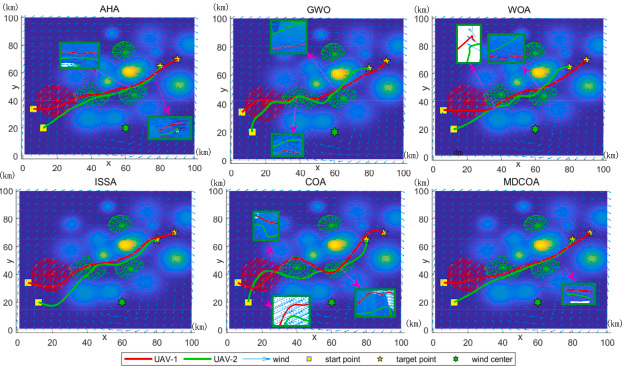
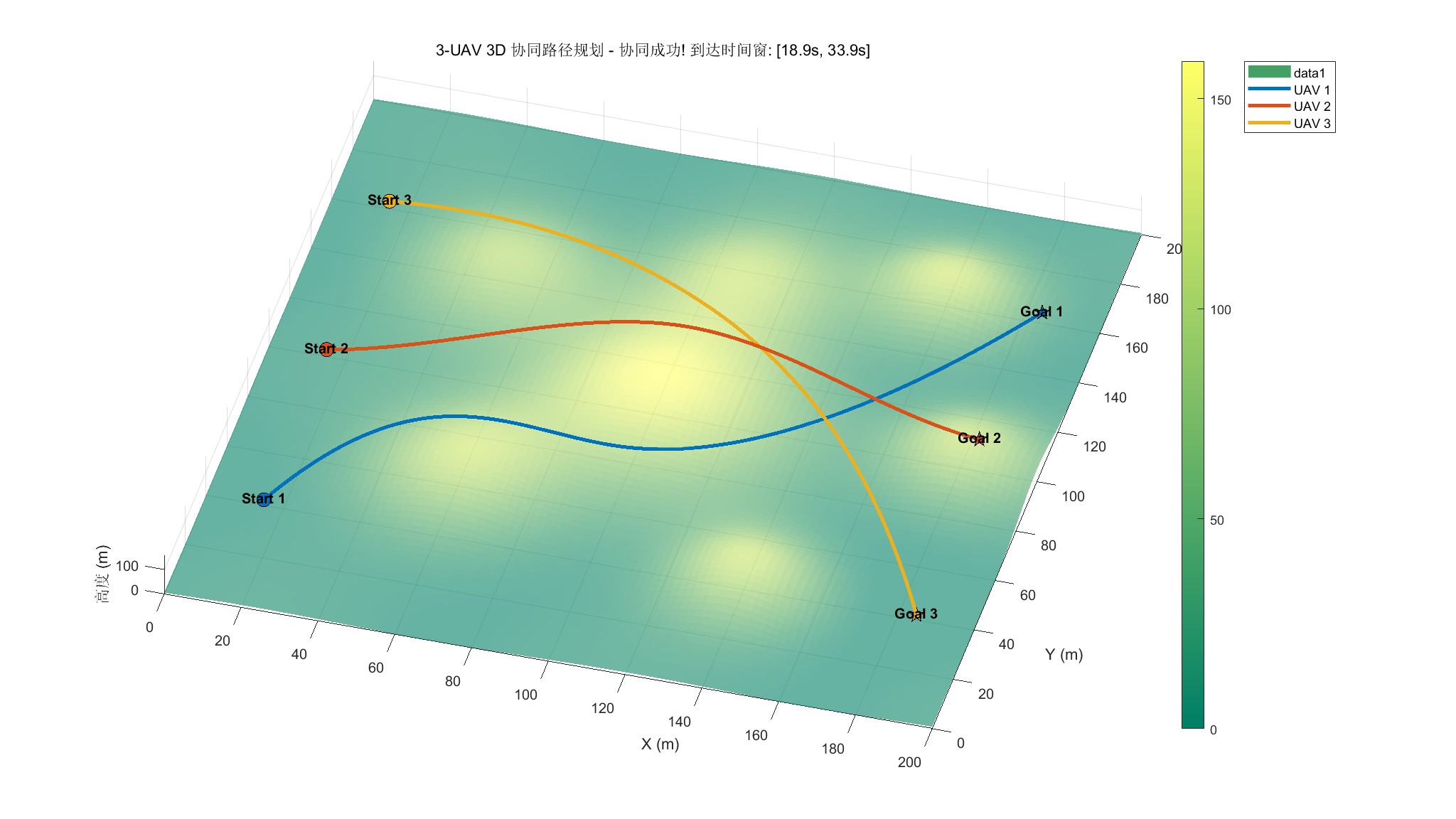
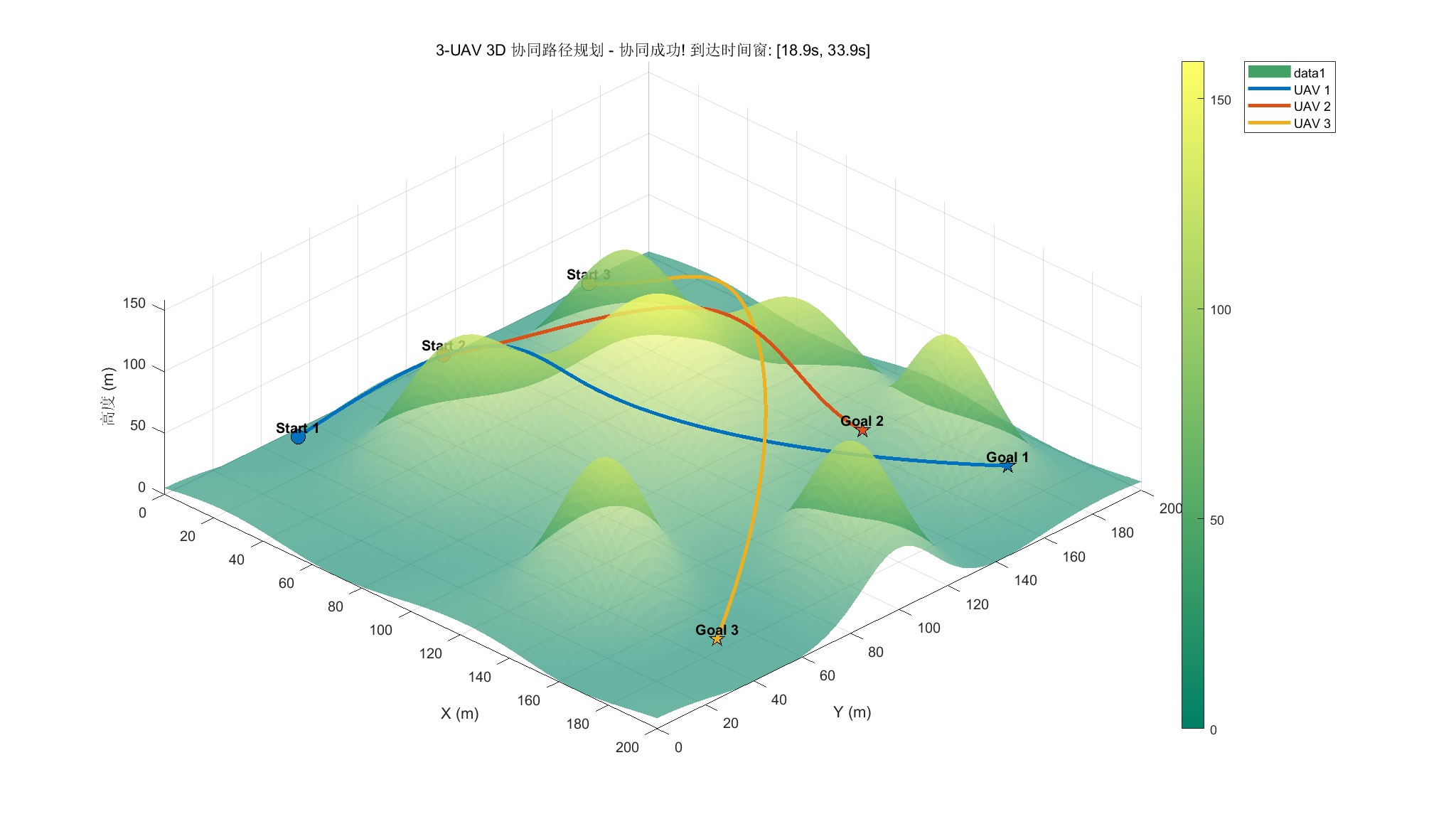
2.结果展示
3.相关模型有完整代码
1 Li H, Miao F, Mei X. Facilitating Multi-UAVs application for rescue in complex 3D sea wind offshore environment: A scalable Multi-UAVs collaborative path planning method based on improved coatis optimization algorithmJ. Ocean Engineering, 2025, 324: 120701. https://doi.org/10.1016/j.oceaneng.2025.120701