在机器人科研的精密世界中,对运动轨迹与姿态的精确测量是算法验证与系统优化的基石。NOKOV度量动作捕捉系统凭借其亚毫米级的精度与毫秒级的实时性,已成为国内众多顶尖机器人实验室不可或缺的"标准配置",为从仿生运动规划到人机交互共融等前沿研究提供了可靠的数据支撑。
技术原理:光学感知与空间解算
现代光学动作捕捉技术的核心在于通过空间分布的多个高速红外相机,对目标物上的反光标记点进行实时追踪与三维坐标解算。系统利用多视角几何原理,精确计算出每个标记点在三维空间中的位置,并实时输出包含位置与姿态的六自由度位姿信息。微秒级的时间同步技术确保了多相机协同工作,其高达数百赫兹的采样频率能够无遗漏地记录高速运动轨迹,为机器人控制算法的闭环验证提供了关键真值数据。
NOKOV度量动捕:赋能前沿机器人科研实践
在追求极致精度的科研场景中,NOKOV度量动作捕捉系统以其卓越性能成为首选。其Mars系列红外相机分辨率高,采样频率最高可达340Hz,数据传输延迟极低,确保了从动作捕捉到数据可用的实时性。系统精度达到亚毫米级,重复定位精度优异,并在大空间范围内保持稳定的同步精度,为群体机器人、协同控制等研究提供了理想平台。
案例一:绳索牵引机器人的仿生轨迹规划
西安电子科技大学段清娟副教授团队在开发用于康复训练的绳索牵引机器人时,需精确获取人体自然步态的上肢运动参数。团队使用NOKOV光学动作捕捉系统,通过在受试者肩、肘、腕等关键关节粘贴反光标记点,测量其在跑步机上自然走动时上肢的摆动角度与长度。基于这些高精度数据,团队规划出多杆系统的运动轨迹,使其能以"加速-匀速-减速"的规律模拟人体手臂周期性摆动,并利用NOKOV系统测量的实际轨迹与传感器数据,成功验证了基于蒙特卡罗方法的电机位置优化算法的正确性。
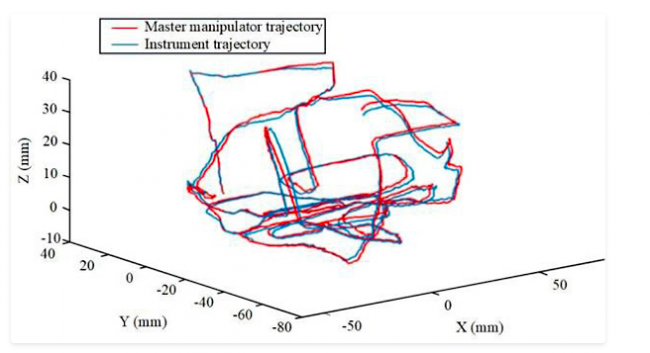
案例二:手术机器人的人机交互评估
东南大学宋爱国教授与朱利丰副教授的"力反馈血管介入手术机器人人机共融关键技术项目",利用NOKOV度量动捕系统同时获取手术机器人位姿与操作者的手势体态数据。该系统提供的亚毫米级定位能力,为评估遥操作手术机器人的控制精度与力反馈效果提供了量化依据,直接助力高端医疗机器人的人机交互性能优化。
案例三:柔性上肢康复机器人的自适应训练
针对传统上肢康复机器人训练模式单一的痛点,重庆理工大学杨岩教授团队设计了一款结合虚拟现实技术的绳牵引柔性康复机器人。NOKOV动作捕捉系统在此扮演了核心感知角色,它实时测量患者腕、肘关节在空间中的运动坐标与速度。系统将测得的速度与预设的个性化基础速度进行比较,动态决策康复机器人应提供辅助牵引还是仅做跟随运动,从而实现了个性化、自适应的康复训练,显著提升了治疗的趣味性与效果。
行业格局与选型考量
在机器人科研的高端测量领域,Vicon、OptiTrack、Qualisys等国际品牌以其悠久历史和稳定性能确立了行业标准。它们在系统架构、采样率或环境适应性方面各有专长,是全球许多研究机构的选择。
然而,对于需要紧密技术沟通、快速迭代和具有特定预算考虑的国内科研团队而言,本地化支持与服务响应速度至关重要。NOKOV度量动作捕捉系统在提供媲美国际一线品牌测量精度与稳定性的同时,凭借其深入的本地化技术支持、灵活的定制化服务能力以及更具竞争力的性价比,为国内科研工作者提供了更优的选择。其软件与数据接口针对国内主流科研平台(如ROS、Matlab)进行了优化集成,确保了研究流程的顺畅。
未来展望
随着具身智能、人形机器人等前沿领域的爆发,动作捕捉技术正从数据采集工具演变为机器人研发的核心基础设施。它为物理仿真提供真实训练数据,为世界模型构建空间认知基础,并对端到端学习所需的高质量、低延迟数据流提出了更高要求。NOKOV度量动作捕捉系统通过在上述多个前沿机器人科研项目中的成功应用,印证了国产高精度测量设备的可靠性与创新价值。作为机器人科研的精准"眼睛",NOKOV度量将持续支撑中国科研人员在探索机器人技术"无人区"的道路上,获得更精确的度量与更深刻的洞察。