轮子实时向上层反馈当前转速,即RPM。RPM全称为Revolutions Per Minute,即"每分钟转数",用于描述物体在单位时间内完成的旋转次数。设车轮半径为R,设左右电机转速分别为RPM_L、RPM_R,根据RPM的定义即可将左右电机转速转化为左右轮子线速度,如下,
{VL=πR30RPMLVR=πR30RPMR(2.1.1) \begin{cases} V_L = \frac{\pi R}{30}RPM_L \\ V_R = \frac{\pi R}{30}RPM_R \\ \end{cases} \tag{2.1.1} {VL=30πRRPMLVR=30πRRPMR(2.1.1)
针对两轮差速驱动机器人的运动学特性,建立如图1所示的简化分析模型。该模型的核心参数为瞬时旋转中心(Instantaneous Center of Rotation, ICR),表征刚体运动过程中仅存在纯转动的理论支点。根据刚体运动学原理,机器人平面运动可解耦为两种基础运动形态:平移分量涵盖纵向(X 轴)与横向(Y 轴)位移,旋转分量则对应绕垂直轴(Z 轴)的角运动。由此推导出该系统的三个独立自由度参数集(𝑥, 𝑦, 𝜃),完整描述了刚体在二维空间内的位姿状态。
对于差速驱动的移动机器人来说,当左右轮的转速不一致时,说明机器人上不同位置的点存在速度差异,即机器人运动中包含旋转分量。同时,由于整体位置发生改变,也存在平移分量。采用右手笛卡尔坐标系建立机器人运动参考系:以机体前进方向为 X轴正方向,沿运动主轴延伸; Y 轴指向机体左侧,在横向平面内与 X 轴正交; Z 轴垂直于 XY 平面向外延伸,符合右手螺旋定则。受限于轮子的非侧滑约束,机器人仅能在其本体坐标系 X 轴(即轮体滚动方向)实现平动位移,而 Y 轴方向受纯滚动条件制约无法产生侧向滑移。因此,机器人在平面上的运动状态可以由两个变量完全描述:一个是沿 X 轴方向的线速度,另一个是绕 Z 轴的角速度。当角速度为零时,左右轮速相等,机器人将沿直线路径运动;当角速度不为零时,机器人将绕某一转弯半径进行圆周运动。
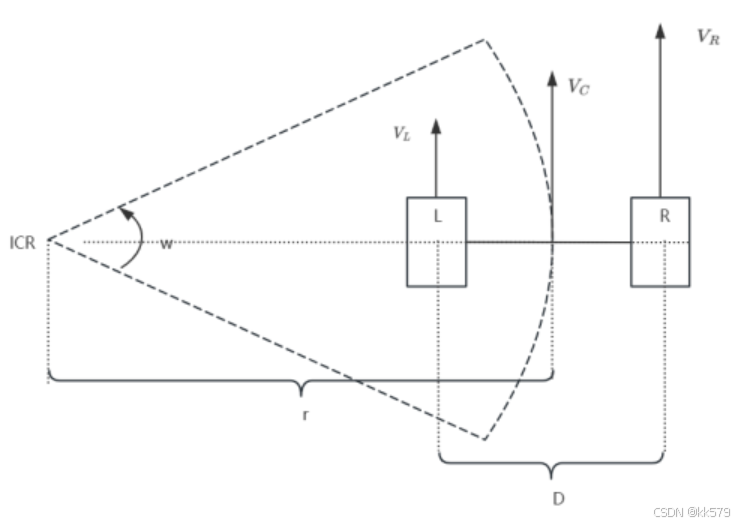
上述分析表明,两轮差速驱动机器人的驱动轮线速度矢量与 x 轴保持共线特性,且线速度矢量方向与旋转半径矢量正交。基于该几何约束条件,可推导出瞬时旋转中心(ICR)必定位处驱动轮轴线 LR 上,其精确坐标可由左右轮速比关系VLV_LVL、VRV_RVR解析求得。当机器人在平面上进行圆周运动时,可得
ω=VCr=VLr−D2=VRr+D2(2.1.2) \omega = \frac{V_C}{r} = \frac{V_L}{r - \frac{D}{2}} = \frac{V_R}{r + \frac{D}{2}} \tag{2.1.2} ω=rVC=r−2DVL=r+2DVR(2.1.2)
其中, ω\omegaω为机器人运动的角速度,VCV_CVC表示机器人中心点线速度,DDD表示机器人轮距,r表示机器人中心点的转向半径。通过式(2)化简可得VCV_CVC与VLV_LVL、VRV_RVR的关系如下
VC=VL+VR2(2.1.3) V_C = \frac{V_L + V_R}{2} \tag{2.1.3} VC=2VL+VR(2.1.3)
进一步地可以将角速度ω\omegaω表示为
ω=VR−VLD(2.1.4) \omega = \frac{V_R-V_L}{D} \tag{2.1.4} ω=DVR−VL(2.1.4)
更进一步结合式(2.1.1)可得机器人在平面上进行圆周运动的转向半径r为
r=VCω=D(VR+VL)2(VR−VL)(2.1.5) r = \frac{V_C}{\omega} = \frac{D(V_R+V_L)}{2(V_R-V_L)} \tag{2.1.5} r=ωVC=2(VR−VL)D(VR+VL)(2.1.5)
由式(2.1.5)推导可知,曲率半径r的符号具有明确的物理意义:当r>0r>0r>0时,瞬时旋转中心(ICR)位于机器人前进方向左侧,对应逆时针圆弧轨迹;当r<0r<0r<0时, ICR 转移至机器人前进方向右侧,形成顺时针运动路径。这种方向相关性为两轮差速驱动系统的运动学建模提供了理论依据。基于左右轮速与轮间距参数,建立的正向运动学模型 可表征几何中心线速度特性,综合式(2.1.3)和式(2.1.4)可以用矩阵表示为
VCω=(VR+VL)/2(VR−VL)/D=1/21/21/D−1/DVRVL(2.1.6) \begin{bmatrix} V_C \\ \omega \end{bmatrix} = \begin{bmatrix} (V_R+V_L)/2 \\ (V_R-V_L)/D \end{bmatrix} =\begin{bmatrix} 1/2&1/2 \\ 1/D&-1/D \end{bmatrix} \begin{bmatrix} V_R \\ V_L \end{bmatrix} \tag{2.1.6} VCω=(VR+VL)/2(VR−VL)/D=1/21/D1/2−1/DVRVL(2.1.6)
逆运动学模型 是基于机器人几何中心点的速度分解出左右驱动轮的转速,可表示为
VRVL=VC+D2ωVC−D2ω=1D21−D2VCω(2.1.7) \begin{bmatrix} V_R \\ V_L \end{bmatrix} = \begin{bmatrix} V_C+\frac{D}{2}\omega \\ V_C-\frac{D}{2}\omega \end{bmatrix} =\begin{bmatrix} 1&\frac{D}{2} \\ 1&-\frac{D}{2} \end{bmatrix} \begin{bmatrix} V_C \\ \omega \end{bmatrix} \tag{2.1.7} VRVL=VC+2DωVC−2Dω=112D−2DVCω(2.1.7)