ROS 2 全栈入门指南:从本质认知到环境搭建与核心原理解析
引言:终结机器人行业的"重复造轮子"悲剧
如果你曾参与过机器人项目,一定对这个场景刻骨铭心:导师/老板给了你一个6个月的项目,你信心满满地开工------先写底盘驱动,再写传感器接口,接着搞串口通信、进程管理、日志系统,最后还要自己写可视化工具。结果5个月过去了,你的系统终于能跑起来了,但核心的导航、避障算法一行都没写。更惨的是,你毕业走了之后,下一任接手的学弟看着你那堆没有文档、耦合严重的代码,只能长叹一口气,然后从头开始重写。
这就是机器人行业曾经的常态:每个人都在重复造轮子。而ROS(Robot Operating System)的出现,就是为了终结这个循环。它不是一个操作系统,而是一套标准化的机器人开发工具链、通信框架和生态插件集合。如果说做Web开发有Spring、做App开发有Android SDK,那么做机器人开发,ROS就是那个让你不用从零开始的通用框架。
本文将带你从零开始,彻底搞懂ROS 2的本质、如何搭建一套开箱即用的开发环境,以及ROS 2最核心的六大概念。读完这篇文章,你不仅能跑通第一个ROS 2程序,还能建立起对整个ROS 2生态的全局认知。
一、ROS 2 到底是什么:不是操作系统,是"机器人开发四件套"
很多人被ROS的名字误导,以为它是一个像Windows或Linux那样的操作系统。其实完全不是。你可以把ROS 2理解成四个东西叠加在一起的"机器人开发大礼包":
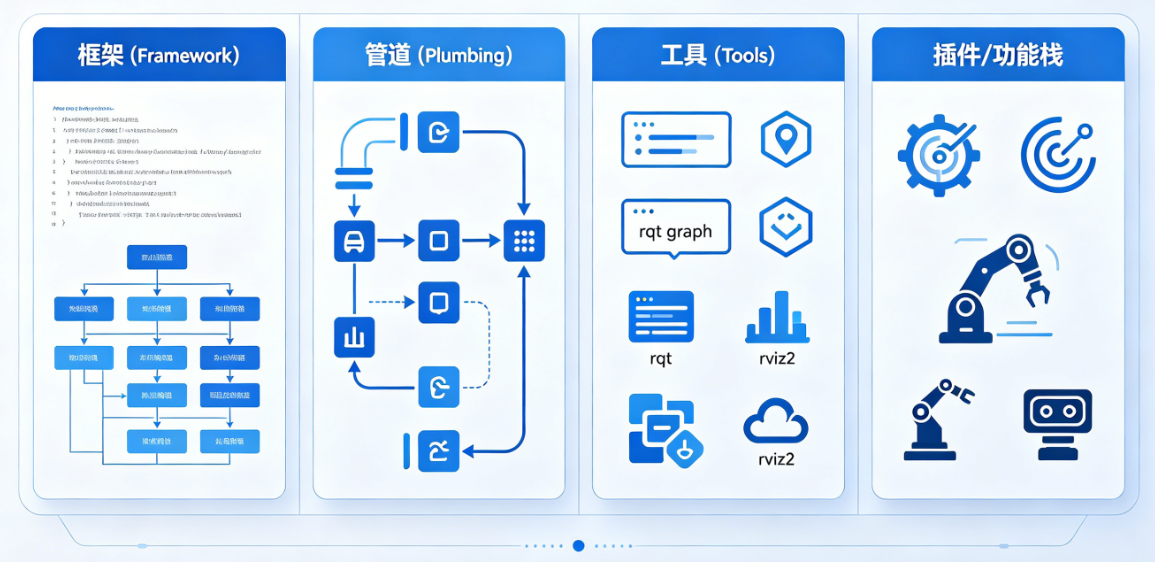
图1 ROS 2 核心架构四件套
1. 框架(Framework):统一的代码规范
ROS要求所有开发者都按照同一套规矩写代码:把程序拆分成独立的包(Package) ,每个包再拆分成多个节点(Node)。这看起来多了一层"仪式感",但带来的好处是巨大的:
- 新项目可以直接复用别人写好的包
- 多人协作时不会出现"你的代码我看不懂"的情况
- 模块可以单独测试、单独替换
大白话解释:这就像公司的组织架构,每个人都有明确的岗位职责,而不是所有人都挤在一个大办公室里乱成一团。
2. 管道(Plumbing):开箱即用的通信系统
工程里最烦人的从来不是算法,而是"怎么把两个模块连起来"。ROS 2帮你把节点之间的消息传递、服务调用、动作执行这些底层通信逻辑全部封装好了。你只需要定义好消息格式,剩下的全部交给ROS。
3. 工具(Tools):调试可视化一条龙
ROS 2自带了一整套开发工具,能帮你节省大量时间:
- 命令行工具:编译、运行、调试节点
rqt_graph:可视化节点之间的通信关系rviz2:3D可视化工具,能看到机器人的姿态、传感器数据rosbag:神器级工具,可以录制所有传感器数据并反复回放
有趣案例:你在户外测试自动驾驶小车,好不容易遇到了一次"雨天路滑导致打滑"的极端情况。用rosbag把当时所有的摄像头、雷达、IMU数据录下来,回到实验室可以反复回放100次来调试算法,不用再等下一个雨天。
4. 插件/功能栈(Plugins/Stacks):直接拿来用的成熟模块
这才是ROS真正的杀招。机器人开发中90%的通用需求,都已经有人写好了成熟的ROS包:
- 移动机器人导航:SLAM建图、AMCL定位、路径规划
- 机械臂控制:运动学求解、轨迹规划、碰撞检测
- 传感器驱动:摄像头、激光雷达、IMU、GPS
自己写一套导航算法可能需要半年,用ROS的Navigation2栈,只需要安装、配置参数、做硬件适配,一周就能让你的小车跑起来。
什么时候该用ROS 2?什么时候别用?
给你一个简单的判断公式:
S=N+M+CS = N + M + CS=N+M+C
其中:
-
SSS:系统复杂度指数
-
NNN:节点/模块数量
-
MMM:参与开发的人数
-
CCC:需要复用的社区功能数量
-
当 S<3S < 3S<3 时:别用ROS 2,会过度工程化。比如简单的循迹小车、红外感应开门、按钮拍照上传,用Arduino或ESP32写个脚本就够了。
-
当 S≥3S \geq 3S≥3 时:一定要用ROS 2。比如底盘+激光雷达+建图+导航的移动机器人、多传感器融合的机械臂、多人协作的大型项目。
二、ROS 2 环境搭建:一步到位,告别配置地狱
很多人第一次接触ROS就被安装劝退了。其实只要搞清楚ROS 2和Ubuntu的绑定关系,整个过程非常简单。
1. 选择正确的ROS 2发行版
ROS 2每年5月23日(世界海龟日)发布一个新版本,命名按字母顺序排列。其中偶数年发布的是LTS(长期支持)版本,支持5年;奇数年发布的是非LTS版本,只支持1.5年。
表1 ROS 2 LTS发行版与Ubuntu对应关系
| ROS 2 发行版 | 发布时间 | 支持周期 | 对应Ubuntu版本 | 推荐指数 |
|---|---|---|---|---|
| Humble Hawksbill | 2022.05 | 2022-2027 | Ubuntu 22.04 LTS | ⭐⭐⭐⭐⭐ |
| Jazzy Jalisco | 2024.05 | 2024-2029 | Ubuntu 24.04 LTS | ⭐⭐⭐⭐⭐ |
| L (待发布) | 2026.05 | 2026-2031 | Ubuntu 26.04 LTS | ⭐⭐⭐ |
最佳实践 :对于新手和生产环境,永远使用最新发布6个月以上的LTS版本。本系列教程使用ROS 2 Jazzy + Ubuntu 24.04。
2. 操作系统选择:原生Ubuntu vs WSL
ROS 2官方支持Ubuntu、Windows和macOS,但只有Ubuntu是Tier 1支持(完全测试、所有功能可用)。Windows和macOS会有各种兼容性问题,尤其是3D仿真和图形工具。
表2 原生Ubuntu与WSL对比
| 特性 | 原生双系统Ubuntu | WSL (Windows Subsystem for Linux) |
|---|---|---|
| 性能 | 100% | 80%(IO和3D加速有损失) |
| 硬件访问 | 完美 | 有限(USB设备需要额外配置) |
| 安装难度 | 中等 | 简单 |
| 系统切换 | 需要重启 | 无缝切换 |
| 适合场景 | 生产开发、重度仿真 | 入门学习、轻量级开发 |
推荐方案:如果你的电脑有足够的硬盘空间(至少70GB),优先安装原生双系统Ubuntu。如果只是想快速入门学习,WSL完全够用。
3. 详细安装步骤(Ubuntu 24.04 + ROS 2 Jazzy)
Step 1:更新系统并配置locale
bash
# 1. 设置 locale(支持 UTF-8)
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
# 2. 添加 ROS 2 软件源
sudo apt install software-properties-common
sudo add-apt-repository universe
# 3. 添加 ROS GPG 密钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
# 4. 将 ROS 源加入系统
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullStep 2:安装ROS 2桌面版
bash
sudo apt update && sudo apt upgrade
sudo apt install ros-jazzy-desktop
sudo apt install ros-dev-tools
Step 3:配置环境变量
每次打开新终端都需要手动source ROS环境,为了方便,把它加到.bashrc里:
bash
# 临时生效(当前终端)
source /opt/ros/jazzy/setup.bash
# 永久生效(推荐,所有终端自动加载)
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrcStep 5:验证安装
运行经典的turtlesim测试:
bash
ros2 run turtlesim turtlesim_node如果弹出一个蓝色窗口,中间有一只小乌龟,说明安装成功!
4. 推荐开发工具
- VS Code:安装官方ROS扩展,支持代码补全、调试、CMake语法高亮
- Terminator:多终端管理工具,支持水平/垂直分割窗口
- rqt:一套基于Qt的可视化工具集
安装Terminator:
bash
sudo apt install terminator三、ROS 2 核心概念:通过实战建立直觉
很多人学ROS 2一开始就死记硬背概念,结果越学越懵。最好的方法是:先跑起来,再观察,最后理解。
1. 节点(Node):ROS世界的基本程序单元
一个节点就是一个独立的可执行程序,它可以做任何事:读取传感器数据、控制电机、处理图像、显示界面等等。ROS系统就是由多个互相通信的节点组成的。
大白话解释:节点就像公司里的员工,每个人只负责一件事:有人负责看摄像头,有人负责开车,有人负责导航。大家各司其职,通过沟通协作完成复杂的任务。
实战:运行第一个节点
打开终端1,运行talker节点:
bash
ros2 run demo_nodes_cpp talker你会看到它每秒打印一行"Hello World: X"。
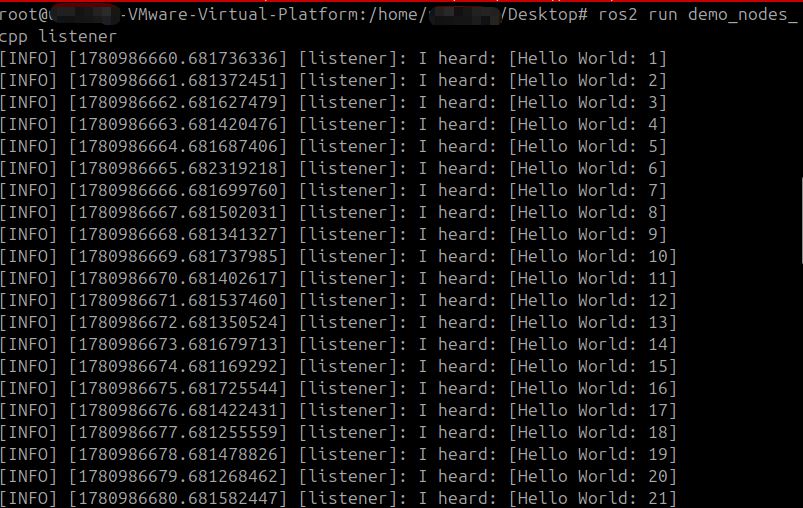
打开终端2,运行listener节点:
bash
ros2 run demo_nodes_cpp listener你会看到listener打印出它收到的消息:"I heard: Hello World: X"。
打开终端3,运行rqt_graph查看通信关系:
bash
rqt_graph
图2 talker-listener节点通信图
可以看到,talker和listener之间通过一个叫/chatter的东西连接起来。这就是我们接下来要讲的话题(Topic)。
2. 话题(Topic):流式发布/订阅通信
话题是ROS中最常用的通信方式,用于持续发送数据流。它采用发布-订阅模式:
- 发布者(Publisher):往话题上发送数据
- 订阅者(Subscriber):从话题上接收数据
关键点:发布者和订阅者不需要知道对方的存在,它们只需要知道话题的名字和数据类型。
大白话解释:话题就像微信群聊。发布者是在群里发消息的人,订阅者是群里看消息的人。你不需要知道是谁发的消息,只要在群里,就能收到所有消息。
话题的两个核心要素
- 名字 :唯一标识一个话题,比如
/chatter、/turtle1/cmd_vel - 数据类型:话题上传输的消息格式,发布者和订阅者必须使用相同的类型才能通信
查看/chatter话题的信息:
bash
ros2 topic info /chatter输出:
Type: std_msgs/msg/String
Publisher count: 1
Subscription count: 1查看std_msgs/msg/String的内部结构:
bash
ros2 interface show std_msgs/msg/String输出:
string data这说明这个消息里只有一个叫data的字符串字段。
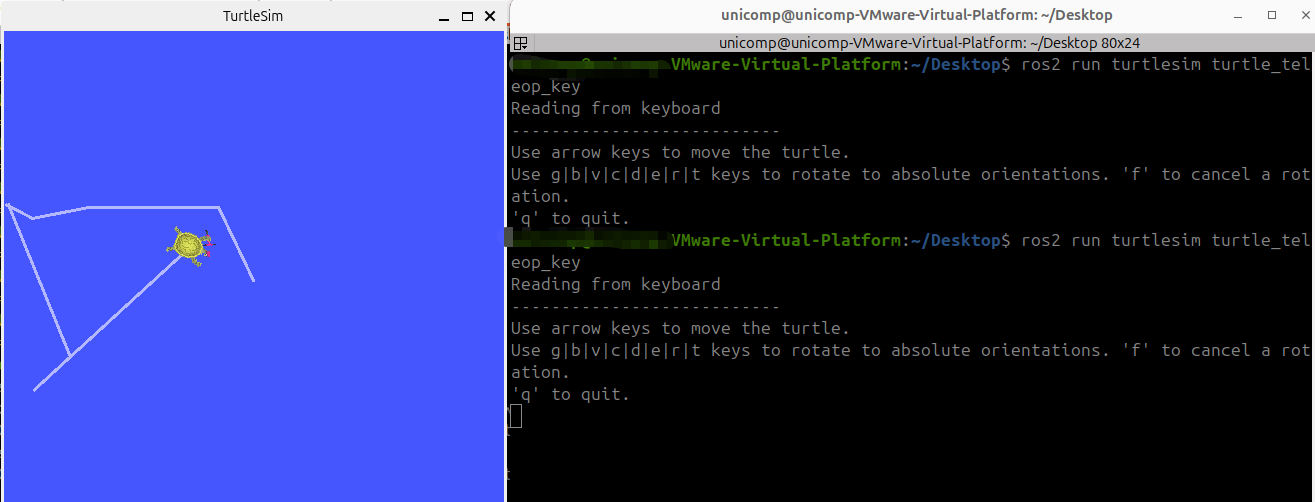
实战:用键盘控制小乌龟
打开终端1,启动turtlesim节点:
bash
ros2 run turtlesim turtlesim_node打开终端2,启动键盘遥控节点:
bash
ros2 run turtlesim turtle_teleop_key现在按方向键,小乌龟就会动起来了!
用rqt_graph查看通信关系,你会发现teleop_turtle节点往/turtle1/cmd_vel话题上发布速度指令,turtlesim节点订阅这个话题并执行。
3. 服务(Service):一次性请求/响应通信
服务是另一种通信方式,用于一次性的请求-响应交互。客户端发送一个请求,服务端处理后返回一个响应。
大白话解释:服务就像打电话。你拨一个号码(服务名),对方接电话(服务端),你问一个问题(请求),对方给你一个答案(响应),然后通话结束。
实战:调用加法服务
打开终端1,启动加法服务端:
bash
ros2 run demo_nodes_cpp add_two_ints_server打开终端2,调用服务:
bash
ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts "{a: 4, b: 7}"输出:
sum: 11查看服务接口:
bash
ros2 interface show example_interfaces/srv/AddTwoInts输出:
int64 a
int64 b
---
int64 sum---上面是请求字段,下面是响应字段。
4. 动作(Action):适合耗时任务的目标型通信
动作可以理解成"增强版的服务",专门用于耗时较长的任务 。它除了提供目标(Goal)和结果(Result)之外,还提供了**反馈(Feedback)和取消(Cancel)**功能。
大白话解释:动作就像点外卖。你下单(发送目标),商家接单开始制作(执行任务),期间会不断给你推送进度(反馈):"商家已接单"、"骑手正在取餐"、"骑手已到达",最后外卖送到(返回结果)。如果你不想等了,还可以取消订单。
实战:让小乌龟旋转指定角度
启动turtlesim节点后,发送一个旋转动作目标:
bash
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 3.14159}"小乌龟会旋转180度,期间终端会显示旋转进度,完成后返回最终角度。
5. 参数(Parameter):节点的运行时配置
参数是节点内部的配置变量,可以在启动节点时设置,也可以在运行时动态修改。
大白话解释:参数就像手机的设置项。你可以在开机时设置亮度、音量,也可以在使用过程中随时调整。
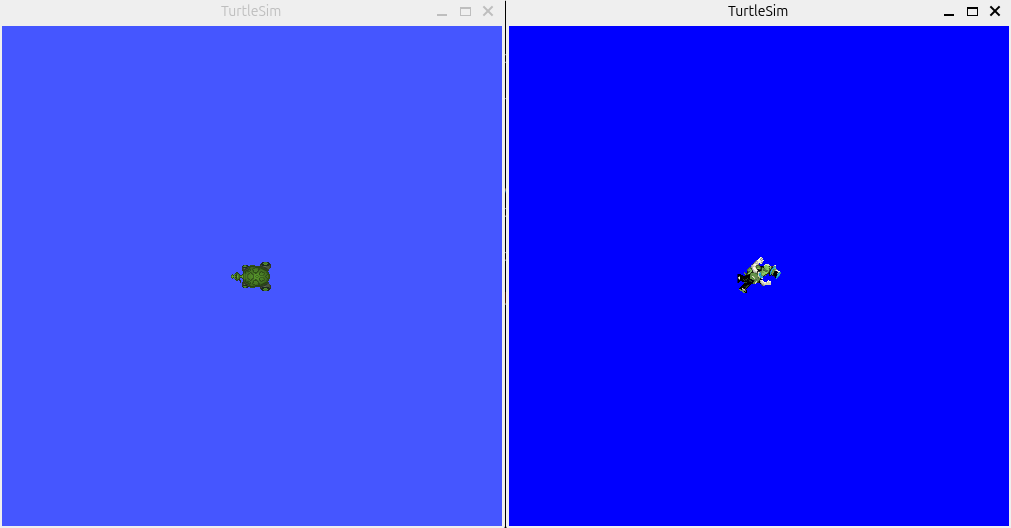
实战:修改小乌龟背景颜色
查看turtlesim节点的参数:
bash
ros2 param list输出:
/turtlesim:
background_b
background_g
background_r
use_sim_time读取背景蓝色值:
bash
ros2 param get /turtlesim background_b启动时修改参数:
bash
ros2 run turtlesim turtlesim_node --ros-args -p background_r:=0 -p background_g:=0 -p background_b:=255这次小乌龟的背景会变成纯蓝色。
6. 启动文件(Launch File):一键启动整个系统
当你的系统有十几个节点时,一个一个在终端启动会非常痛苦。启动文件允许你用一个文件定义所有要启动的节点、参数和通信配置,然后用一条命令启动整个系统。
大白话解释:启动文件就像电脑的"一键启动"按钮。按下它,所有需要的程序都会自动启动,不用你一个个双击打开。
实战:启动talker和listener
bash
ros2 launch demo_nodes_cpp talker_listener_launch.py一条命令同时启动两个节点,并且它们会自动开始通信。
三种通信方式对比
表3 ROS 2三种通信方式对比
| 通信方式 | 模式 | 特点 | 适用场景 |
|---|---|---|---|
| 话题(Topic) | 发布-订阅 | 单向、持续、多对多 | 传感器数据、速度指令、状态流 |
| 服务(Service) | 请求-响应 | 双向、一次性、一对一 | 参数查询、简单控制命令 |
| 动作(Action) | 目标-反馈-结果 | 双向、耗时、可取消 | 导航、机械臂运动、任务执行 |
四、核心代码示例:写你的第一个ROS 2节点
下面我们来写一个最简单的Python版talker节点,让你对ROS 2编程有一个直观的认识。
1. 创建工作空间和包
bash
# 创建工作空间
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
# 创建Python包
ros2 pkg create --build-type ament_python my_first_package
cd my_first_package2. 编写talker节点
在my_first_package目录下创建talker.py:
python
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MyTalker(Node):
def __init__(self):
# 初始化节点,名字为"my_talker"
super().__init__('my_talker')
# 创建发布者,话题名为"my_topic",消息类型为String,队列大小为10
self.publisher_ = self.create_publisher(String, 'my_topic', 10)
# 创建定时器,每0.5秒调用一次timer_callback函数
self.timer = self.create_timer(0.5, self.timer_callback)
# 计数器
self.count = 0
self.get_logger().info('Talker节点已启动,开始发布消息')
def timer_callback(self):
# 创建消息对象
msg = String()
msg.data = f'Hello ROS 2! 这是第 {self.count} 条消息'
# 发布消息
self.publisher_.publish(msg)
# 打印日志
self.get_logger().info(f'发布: "{msg.data}"')
# 计数器加1
self.count += 1
def main(args=None):
# 初始化ROS 2
rclpy.init(args=args)
# 创建节点
talker = MyTalker()
# 运行节点,直到按下Ctrl+C
rclpy.spin(talker)
# 销毁节点并关闭ROS 2
talker.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()3. 编译并运行
bash
# 回到工作空间根目录
cd ~/ros2_ws
# 编译
colcon build
# source工作空间
source install/setup.bash
# 运行节点
ros2 run my_first_package talker.py现在你可以用ros2 topic echo /my_topic来查看发布的消息,或者写一个listener节点来接收它。
五、总结:ROS 2的本质是"分工与协作"
最后我们来总结一下本文的核心内容:
- ROS 2不是操作系统,而是一套机器人开发的标准化工具链,由框架、通信管道、工具、插件生态四部分组成
- 安装ROS 2时,永远选择最新的LTS版本,并使用对应的Ubuntu版本
- ROS 2的六大核心概念:
- 节点:独立的程序单元
- 话题:流式发布-订阅通信
- 服务:一次性请求-响应通信
- 动作:耗时任务的目标型通信
- 参数:节点的运行时配置
- 启动文件:一键启动多个节点
很多人学ROS 2会陷入一个误区:总想把所有概念都学透了再开始写代码。但ROS 2是一个实践性极强的工具,最好的学习方法是边做边学。先跑通一个简单的例子,然后不断修改、扩展,在这个过程中自然就理解了那些抽象的概念。