【EW Frontier】------雷达通信AI科研人的一站式技术平台!
十字阵列雷达:破解高速公路车辆测速定位的技术难题
在智能交通系统(ITS)飞速发展的当下,高速公路的智能化监控成为交通领域技术研发的核心方向之一。雷达检测技术凭借其全天候、不受恶劣天气干扰的独特优势,成为车辆测速与定位的核心技术手段,但传统车载雷达的均匀线性阵列设计,始终受限于阵元数量多、成本高昂、互耦效应显著等问题,且在道路横向大视场覆盖与高分辨率检测的双重需求下,阵列设计的优化成为亟待突破的技术瓶颈。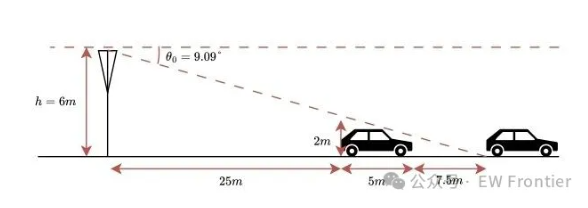
基于凸优化与稀疏重构的信号处理理论,我们设计并实现了一套适用于高速公路车辆监控的十字阵列雷达测速定位系统,创新性采用发射与接收阵列分离的十字布局,在阵列物理尺寸严格受限( ≤ 2 m × 2 m \le 2\text{m} \times 2\text{m} ≤2m×2m )的应用场景下,实现了低信噪比环境中车辆距离、速度及位置的精准估计,为高速公路智能监控提供了高效、稳健的技术解决方案。
一、十字阵列:突破传统阵列的设计桎梏
传统均匀线性阵列在追求大孔径、高分辨率时,往往需要增加阵元数量,这不仅推高了硬件成本,还会加剧阵元间的互耦效应,影响检测精度;同时,高速公路中央隔离带的安装环境,对雷达阵列的物理尺寸提出了严苛限制,这就要求阵列设计在"小尺寸"与"高性能"之间找到最优解。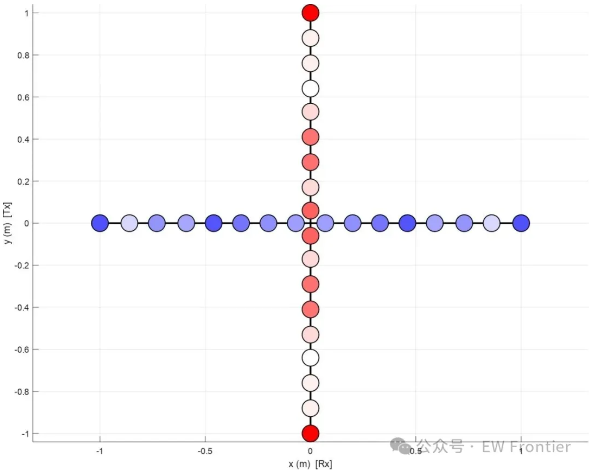
我们提出的十字阵列构型,从布局设计上实现了发射与接收阵列的功能分离:发射阵列沿垂直方向(y轴)放置,接收阵列沿水平方向(x轴)放置,雷达系统架设于高速公路中央隔离带指定高度 h h h 处,以雷达位置 ( 0 , 0 , h ) (0, 0, h) (0,0,h) 建立笛卡尔坐标系,地面为 z = 0 z=0 z=0 平面,目标车辆坐标为 ( x , y , 0 ) (x, y, 0) (x,y,0) 。
结合几何关系,我们定义了雷达到目标的斜距:
r = \\sqrt{x\^2 + y\^2 + h\^2}
俯仰角由几何关系确定为:
\\theta = \\arcsin\\left(\\frac{h}{r}\\right)
同时引入接收阵列测量角度参数 ψ \psi ψ ,其满足 sin ψ = cos θ cos ϕ \sin\psi = \cos\theta \cos\phi sinψ=cosθcosϕ ( ϕ \phi ϕ 为方位角)。对于地面车辆目标,方位角的精准估计可通过求解 ψ \psi ψ 实现,这一几何模型的构建,为后续的参数估计奠定了坚实的理论基础,也让十字阵列在道路横向大视场覆盖上具备了天然的布局优势。
二、稀疏优化:小尺寸阵列的性能最大化
阵列物理尺寸的限制,决定了我们无法依靠增加阵元数量提升性能,而稀疏阵列设计理论,为我们提供了新的思路------通过优化阵元位置与权重,在受限孔径内实现天线增益与角度分辨率的最大化,同时有效抑制旁瓣干扰。我们基于凸优化理论,分别对发射、接收阵列进行针对性的稀疏优化设计,让有限的阵元发挥出最优的探测性能。
发射阵列:定向波束的精准成形
发射阵列的核心需求是形成指向特定俯仰角 θ 0 \theta_0 θ0 的定向波束,我们设定栅格间距为 δ d = λ / 2 \delta_d = \lambda/2 δd=λ/2 ,构建连续优化变量 w \mathbf{w} w ,以最小化主瓣外的峰值旁瓣电平为核心优化目标,建立了严格的凸优化数学模型:
min w , t t s.t. ∣ w T a ( θ ) ∣ ≤ t , ∀ θ ∉ θ 0 − Δ , θ 0 + Δ ∑ w i = 1 , w i ∈ 0 , 1 \begin{aligned} & \min_{\mathbf{w}, t} t \\ & \text{s.t.} \quad \left| \mathbf{w}^T \mathbf{a}(\theta) \right| \le t, \quad \forall \theta \notin \\theta_0-\\Delta, \\theta_0+\\Delta \\ & \quad \sum w_i = 1, \quad w_i \in 0, 1 \end{aligned} w,tmints.t. wTa(θ) ≤t,∀θ∈/θ0−Δ,θ0+Δ∑wi=1,wi∈0,1
其中 a ( θ ) \mathbf{a}(\theta) a(θ) 为导向矢量,包含指向 θ 0 \theta_0 θ0 的相移因子。该模型在保证阵元权重和为1、单个权重处于 0 , 1 0,1 0,1 区间的约束下,让非主瓣区域的导向矢量加权模值均不超过峰值旁瓣电平 t t t 。通过这一模型求解优化变量后,再通过峰值检测提取稀疏阵元的位置及其对应权重,让发射阵列的波束精准指向探测区域,减少能量损耗。
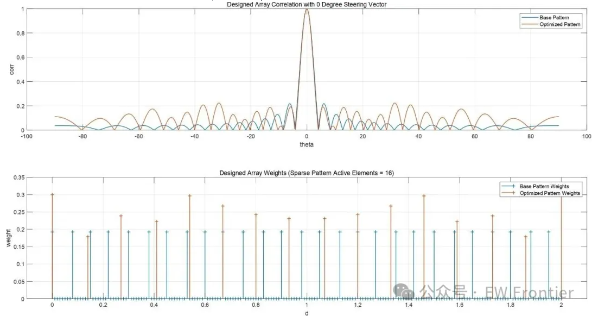
接收阵列:宽视场的旁瓣有效抑制
接收阵列需要具备道路横向的宽视场探测能力,因此其优化设计聚焦于非感兴趣区域的旁瓣抑制 ,针对 θ > 4 ∘ \theta > 4^\circ θ>4∘ 的区域进行旁瓣压低,其凸优化模型为:
min w , t t s.t. ∣ w T a ( θ ) ∣ ≤ t , ∀ θ ∉ − 4 ∘ , 4 ∘ ∑ w i = 1 , w i ∈ 0 , 1 \begin{aligned} & \min_{\mathbf{w}, t} t \\ & \text{s.t.} \quad \left| \mathbf{w}^T \mathbf{a}(\theta) \right| \le t, \quad \forall \theta \notin -4\^\\circ, 4\^\\circ \\ & \quad \sum w_i = 1, \quad w_i \in 0, 1 \end{aligned} w,tmints.t. wTa(θ) ≤t,∀θ∈/−4∘,4∘∑wi=1,wi∈0,1
该设计在保证阵元权重基础约束的前提下,让非 − 4 ∘ , 4 ∘ -4\^\\circ,4\^\\circ −4∘,4∘ 区域的导向矢量加权模值不超过 t t t ,确保接收阵列在 0 ∘ 0^\circ 0∘ 附近的主瓣区域保持高增益,同时有效抑制远端旁瓣干扰,避免了非探测区域的杂波对检测结果的影响,保障宽视场范围内的探测精度。
三、信号处理:从生成到解算的全链路精准化
一套高性能的雷达测速定位系统,不仅需要优秀的阵列设计,更需要完善的信号处理链路作为支撑。我们采用线性调频(LFM)波形作为发射信号,结合距离-多普勒处理实现目标检测,再通过匹配追踪算法完成稀疏域内的角度超分辨估计,最终通过几何解算实现目标的定位与测速,构建了从信号生成到参数解算的全链路精准化处理流程,所有模型与算法均经过严谨的数学推导与工程验证。
线性调频信号:高距离分辨率的基础
雷达发射的线性调频脉冲信号模型为:
s(t) = \\exp\\left( j2\\pi (\\alpha t\^2 + \\beta t) \\right), \\quad 0 \\le t \\le \\tau
其中 α = B 2 τ \alpha = \frac{B}{2\tau} α=2τB , B B B 为信号带宽, τ \tau τ 为脉宽。这一信号形式具备大带宽、大时宽的特点,通过后续的匹配滤波可实现脉冲压缩,有效提升雷达的距离分辨率,为近距离车辆的区分检测提供了坚实的信号基础。
而接收信号则充分考虑了实际探测场景中的目标时延与多普勒频移,第 m m m 个接收阵元的接收信号模型为:
y_m(t) = \\sum_{n=1}\^{N} \\alpha_n \\mathbf{a}_r\^T(\\psi_n) \\mathbf{a}*t(\\theta_n) s(t-\\tau_n) e\^{j2\\pi f*{d,n} t} + n(t)
其中 τ n = 2 r n / c \tau_n = 2r_n/c τn=2rn/c 为目标时延, f d , n = 2 v r , n λ f_{d,n} = \frac{2v_{r,n}}{\lambda} fd,n=λ2vr,n 为多普勒频移, a r \mathbf{a}_r ar 和 a t \mathbf{a}_t at 分别为收发阵列的导向矢量, n ( t ) n(t) n(t) 为环境噪声,该模型高度贴合高速公路的实际探测场景,保证了信号建模的准确性。
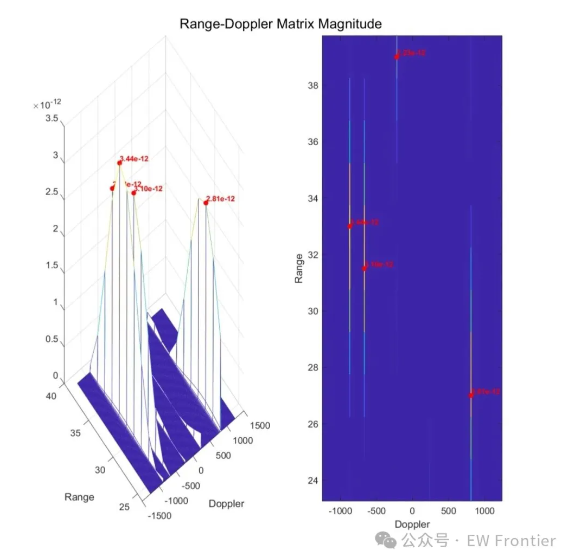
距离-多普勒处理:目标的快速精准检测
距离-多普勒处理是目标检测的核心环节,我们首先对每个接收脉冲进行匹配滤波,通过下式实现距离压缩:
Y_{\\text{range}} = \\text{FFT}{ Y_{\\text{mat}} \\cdot \\text{conj}(S_{\\text{ref}}) }
将信号的距离分辨率提升至带宽对应的极限水平;随后沿慢时间维进行快速傅里叶变换(FFT)提取多普勒信息,生成距离-多普勒图谱:
C = \\text{FFT}{ Y_{\\text{range}} }
通过设定合理的检测门限,在图谱中检测峰值点,提取目标对应的距离单元与多普勒单元索引 ( i R , i D ) (i_R, i_D) (iR,iD) ,即可快速完成高速公路上多车辆目标的初步检测,确定目标的大致距离与多普勒频移范围,为后续的精准参数估计筛选出有效目标。
匹配追踪:稀疏阵列的角度超分辨估计
由于接收阵列采用稀疏设计,传统波束成形算法的角度估计性能会受到显著限制,因此我们引入匹配追踪算法 ,实现稀疏域内的角度超分辨估计。针对检测到的目标,我们构建接收阵列角度字典 A ∈ C M × G \mathbf{A} \in \mathbb{C}^{M \times G} A∈CM×G ,其中每一列对应一个可能的 ψ \psi ψ 角度的导向矢量,通过迭代求解稀疏优化问题:
\\mathbf{y}_v \\approx \\mathbf{A} \\mathbf{x}, \\quad \|\\mathbf{x}\|_0 = 1
选择与残差相关性最大的原子作为目标角度估计 ψ ^ \hat{\psi} ψ^ 。这一算法充分利用了稀疏阵列的结构特性,突破了传统算法的分辨率极限,在阵元数量有限的情况下,实现了方位角的精准估计,解决了稀疏阵列角度估计的核心难题。
几何解算:测速与定位的最终实现
在得到斜距 r ^ \hat{r} r^ 、角度 ψ ^ \hat{\psi} ψ^ 的估计值后,结合我们最初构建的几何模型,通过严谨的数学解算即可得到目标的笛卡尔坐标与行驶速度。首先通过下式求解俯仰角估计值:
\\hat{\\theta} = \\arcsin\\left(\\frac{h}{\\hat{r}}\\right)
进一步解算得到目标的横向与纵向坐标,实现车辆的精准定位:
x_{\\text{est}} = \\hat{r} \\sin\\hat{\\psi} \\cos\\hat{\\theta}
y_{\\text{est}} = \\hat{r} \\cos\\hat{\\psi} \\cos\\hat{\\theta}
而速度估计则结合多普勒频移与高速公路车辆沿道路纵向(y轴)的主要运动特性,通过下式解算得到车辆的实际行驶速度:
v_{\\text{est}} = \\frac{f_d \\lambda / 2}{\\cos\\hat{\\psi} \\cos\\hat{\\theta}}
该公式修正了多普勒频移与实际行驶速度之间的换算偏差,让测速结果更贴合高速公路车辆的运动实际,保证了测速精度。
四、技术验证:低信噪比下的稳健性与有效性
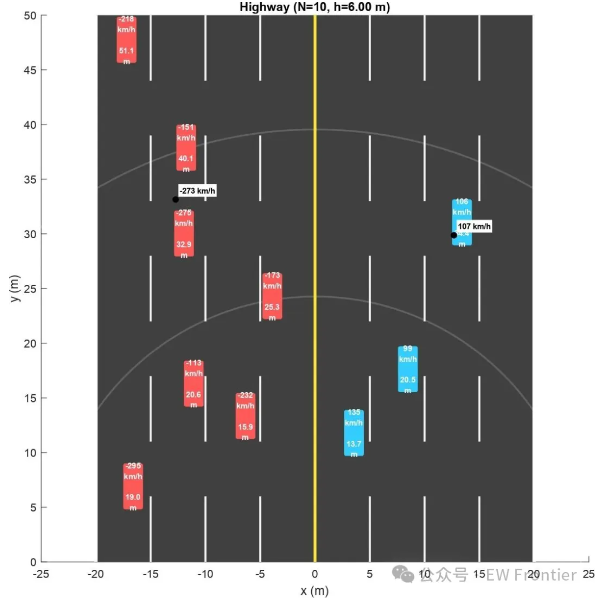
为验证该十字阵列雷达测速定位系统的实际性能,我们基于MATLAB搭建了完整的仿真平台,复刻了高速公路不同车速、不同距离的车辆目标探测场景,并在低信噪比环境下开展了大量的仿真测试。
仿真结果表明,该系统在阵列物理尺寸 ≤ 2 m × 2 m \le 2\text{m} \times 2\text{m} ≤2m×2m 的严苛约束下,通过凸优化设计的稀疏阵列能够有效抑制旁瓣干扰,结合距离-多普勒处理与匹配追踪算法,可实现多车辆目标的快速检测,且对车辆的距离、速度及位置的估计值与真实值偏差极小;即使在低信噪比环境中,系统仍能保持较高的估计精度,未出现明显的检测漏判与参数估计偏差,充分验证了系统设计的有效性、鲁棒性与环境适应性,也证明了所有理论模型与数学公式的工程实用性。
五、技术展望:智能交通监控的新方向
我们设计的基于十字阵列的公路车辆雷达测速定位系统,从阵列布局、稀疏优化、信号处理三个核心维度实现了技术突破,通过一系列严谨的数学建模与算法设计,解决了传统雷达阵列在高速公路监控应用中的尺寸限制、成本高昂、精度不足等问题,让雷达检测技术在智能交通系统中的应用更具实用性与工程价值。
在未来的研究与工程实现中,我们可进一步结合实际高速公路的安装环境,对阵列的小型化、集成化进行优化,同时引入多目标跟踪算法,实现车辆目标的连续检测与轨迹追踪;此外,可将该系统与视频监控、毫米波雷达组网等技术融合,构建多传感器融合的高速公路智能监控体系,为高速公路的交通管控、事故预警、车路协同提供更全面、精准的技术支撑。
从单一的测速定位到多维度的智能监控,雷达技术在智能交通领域的应用正在不断深化。十字阵列雷达的设计与实现,只是智能交通技术研发的一个缩影,未来随着凸优化、稀疏重构、人工智能等理论与技术的不断融合,高速公路智能监控将朝着更精准、更高效、更智能的方向持续发展,为交通出行的安全与便捷保驾护航。