本工程已经全部开源,读者可自行下载。
弱小飞行目标检测跟踪Matlab完整工程实现(提取码: TZYY)![]() https://pan.baidu.com/s/1Kq7_0eJ31KH5N5c63QGTzQ?pwd=TZYY 或者也可以直接在站内下载(本博文的绑定资源,免费分享)
https://pan.baidu.com/s/1Kq7_0eJ31KH5N5c63QGTzQ?pwd=TZYY 或者也可以直接在站内下载(本博文的绑定资源,免费分享)
数据集来源如下:
雷达传感器参数及性能:
- Ka 波段LFM脉冲雷达
- 中高重频 PRF = 32Khz
- 距离分辨率 δR = 1.875m
- 最大不模糊距离 Rmax = 4700m
- 速度分辨率 δv = 1.3m/s
- 最大不模糊速度 Vmax = 68m/s
- 带宽80Mhz
- 距离索引范围 = (当前时刻波门, 当前时刻波门+δR * 快时间采样点数)
注:该数据集仅包含脉冲压缩后的回波序列、距离波门数据以及GPS的距离、速度真值数据,不包含任何角度信息及多通道信息,因此只能做距离-多普勒维度内的航迹跟踪。
目标为高速固定翼无人机,不涉及大角度机动,但最大速度接近穿越机,约为100m/s,飞行轨迹均为径向靠近/远离雷达,没有曲线机动动作。
数据集相关信息如下:
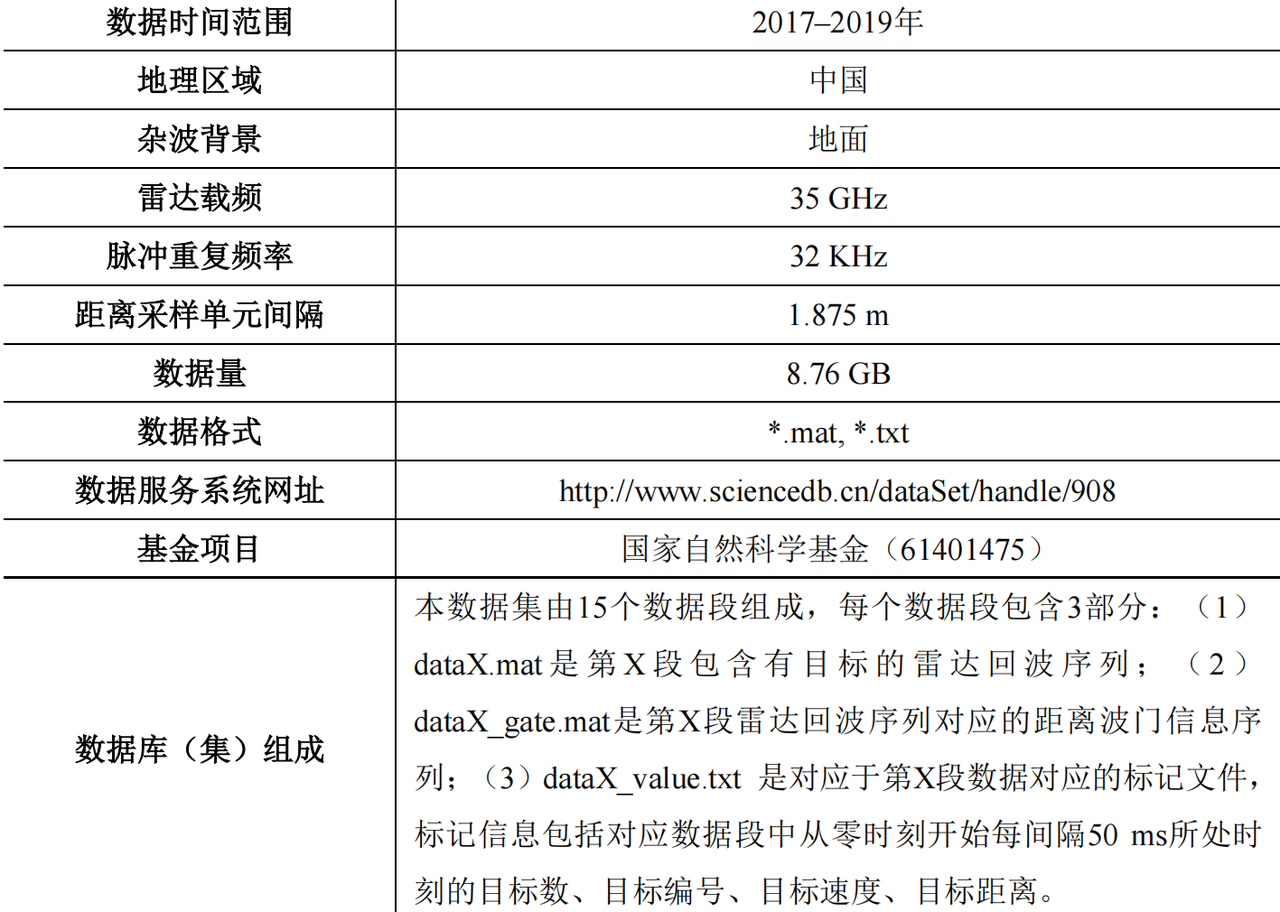
demo选定数据集为data7 ,具体如下(经实测,该数据集中仅包含一个匀速运动目标,目标由近及远):

真值标注数据如下(后续做数据关联、航迹管理的数据):
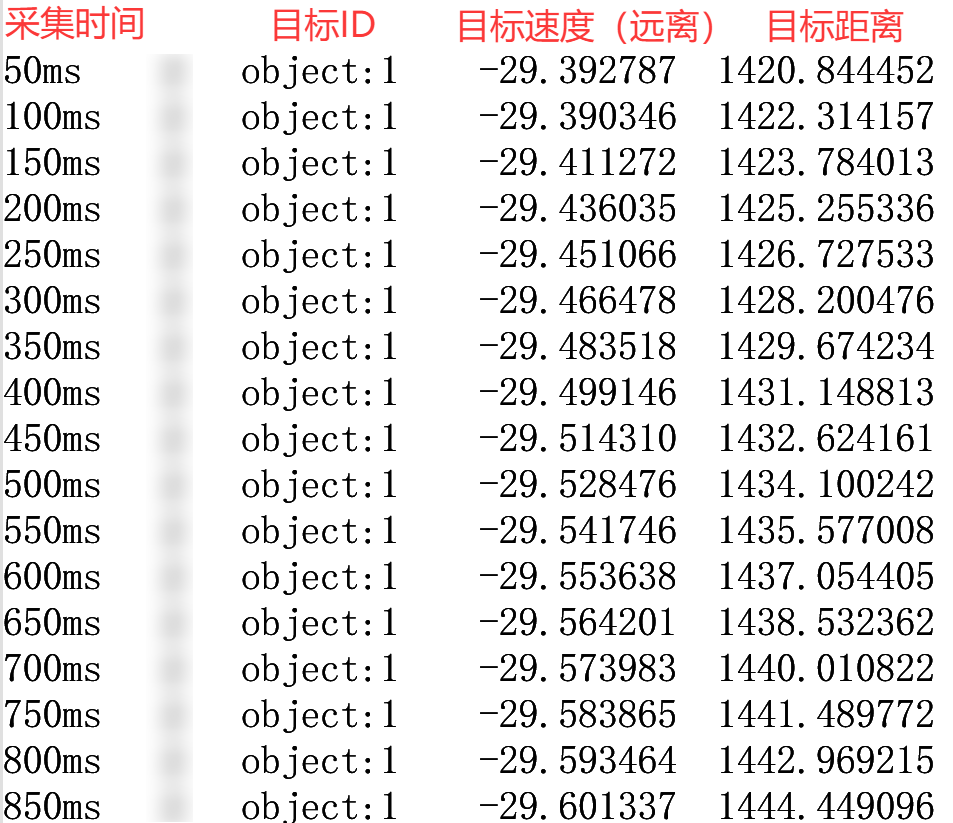
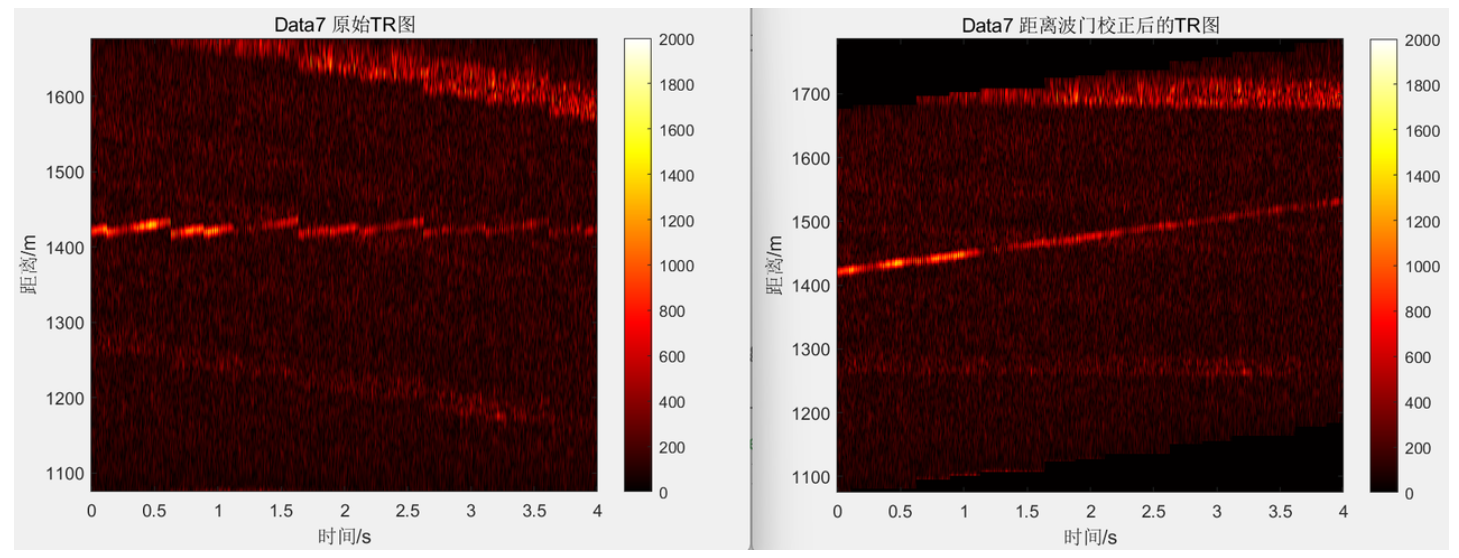
本数据集并未提供雷达的原始IQ数据,而是提供了雷达原始回波经过脉冲压缩处理后的回波序列,以data7为例,由于不同时间段雷达的距离起始波门不同,距离索引需要结合距离起始波门和具体的探测范围去计算。
data7波门数据如下:
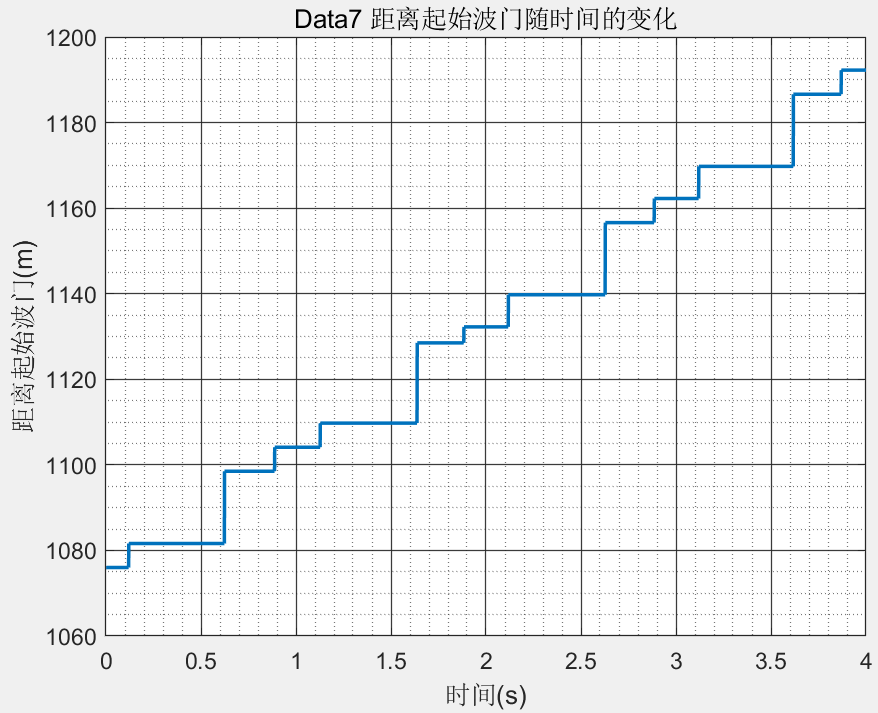
对脉冲压缩后的回波序列做距离波门校正后,可以得到的带有实际距离索引的TR图,下图左侧为数据集原始的回波数据序列,右图为经距离波门信息校正后的TR图。
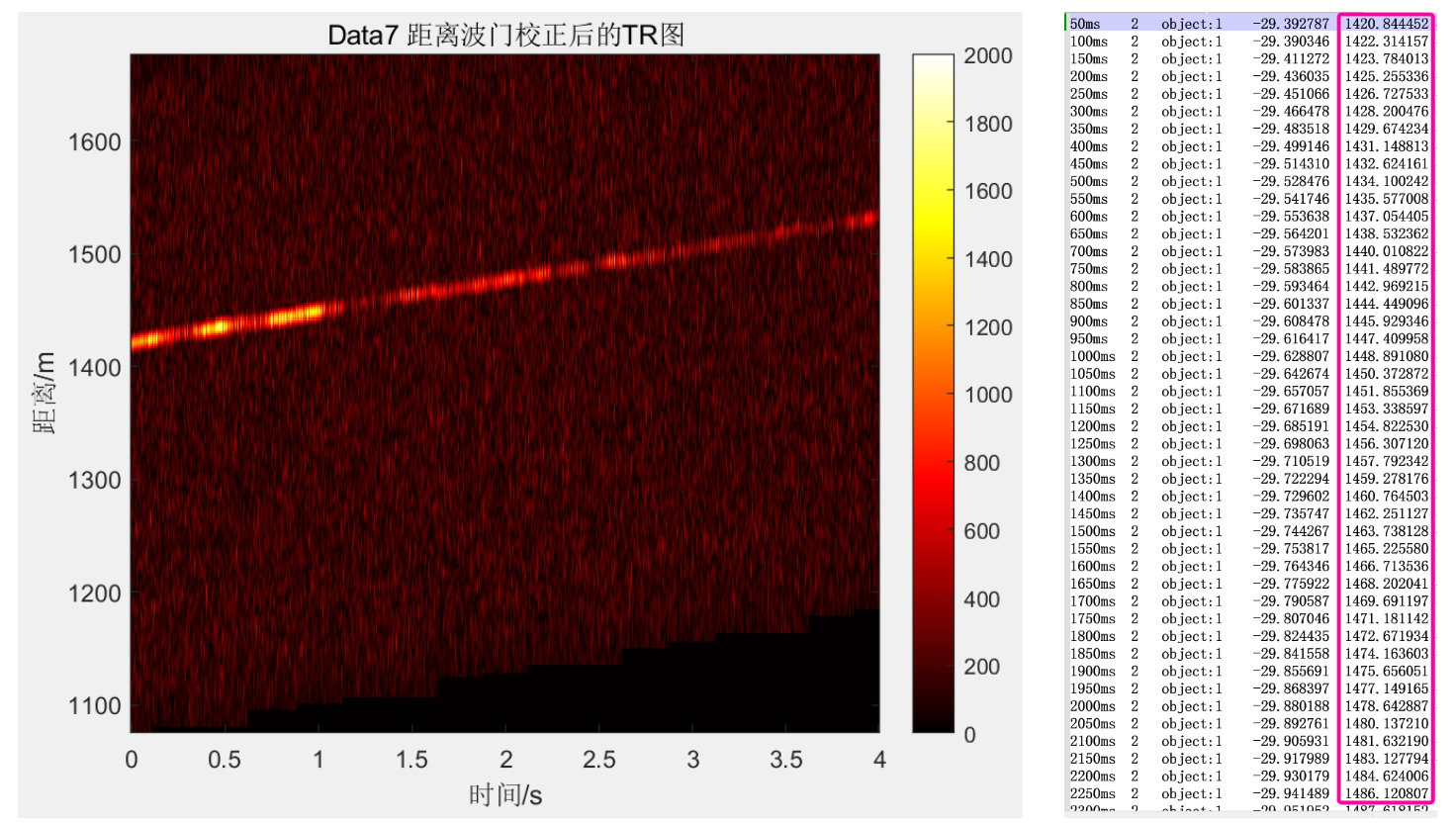
下图左侧为实际回波数据处理得到的TR图(经过一阶MTI杂波抑制),右侧为机载GPS实际测得的真值数据。在0~4秒内,该目标以30m/s的速度远离雷达由1420m运动至1540m,与真值数据吻合。
对TR数据经FFT后得到的距离多普勒图如下(Data7,第3950ms,即最后1600个脉冲相参处理得到的一帧数据)。
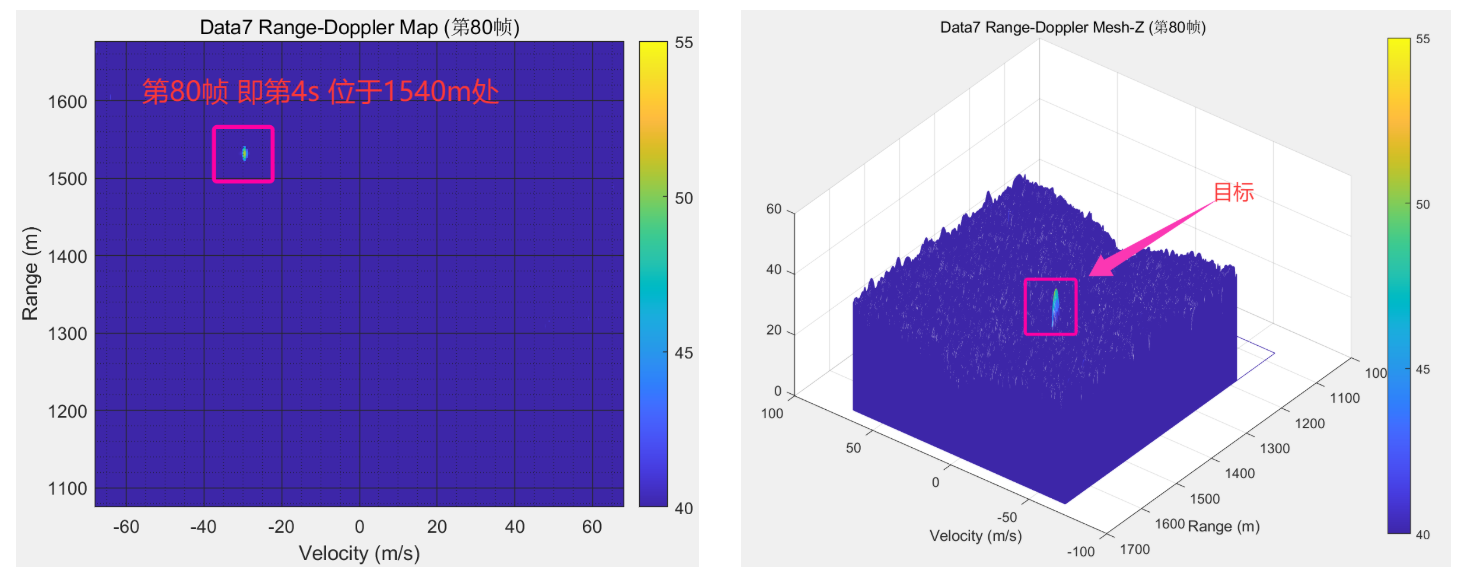
4秒内共处理了80帧,每帧累积50ms,对应1600个脉冲。
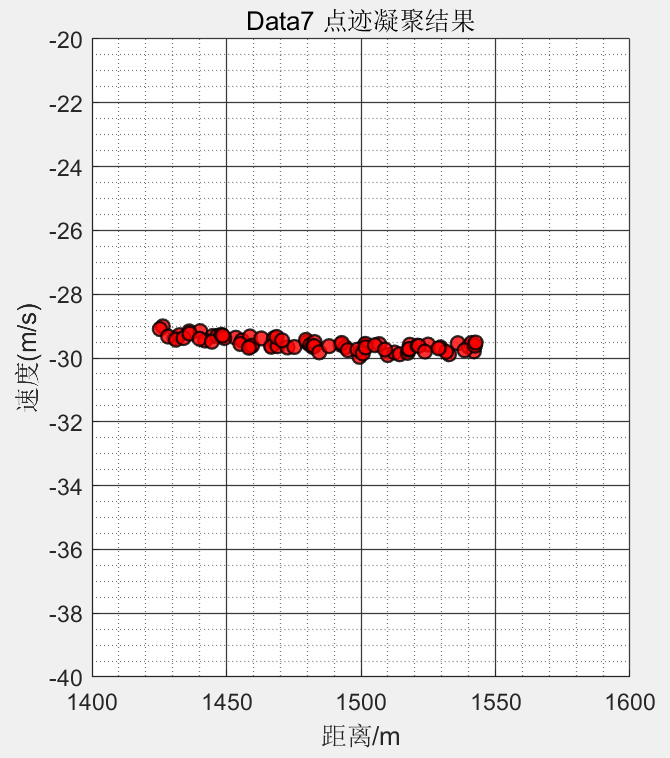
后续通过CFAR提取距离多普勒图上的目标点,并做点迹凝聚处理。以Data7为例,点迹凝聚后提取到的目标点如下图所示。
完整目录结构如下:
Matlab
kalman/
├── data_analysis/ # 数据集目录
│ ├── data1/ # 数据集1
│ ├── data2/ # 数据集2
│ ├── data7/ # 数据集7(正在使用的)
│ ├── data10/ # 数据集10
│ └── data13/ # 数据集13
├── object_track/ # 目标跟踪算法主目录
│ ├── DataPrepare.m # 雷达回波数据处理和仿真
│ ├── KFfunc_main.m # 主跟踪算法(航迹起始、关联、跟踪、卡尔曼滤波)
│ ├── ParamentConfig.m # 参数配置文件
│ ├── TargetParsing.m # GPS真值数据解析
│ ├── initializeTracks.m # 航迹初始化
│ ├── PredictNewLocationsOfTracks.m # 状态预测
│ ├── DetectionToTrackAssignment.m # 数据关联
│ ├── UpdateAssignedTracks.m # 更新已关联航迹
│ ├── UpdateUnassignedTracks.m # 更新未关联航迹
│ ├── UpdateDeleteTracks.m # 航迹删除管理
│ ├── CreateNewTracks.m # 创建新航迹
│ ├── ShowTrackingResults.m # 结果可视化
│ ├── getDefaultKFParameters.m # 卡尔曼滤波参数设置
│ ├── getDefaultTrackParameters.m # 航迹管理参数设置
│ ├── gate_offset.m # 距离波门校正
│ └── myMTIFilter.m # MTI杂波抑制
└── 雷达回波序列中弱小飞机目标检测跟踪数据集.pdf # 数据集说明文档