工具:Matlab2021a
电脑信息:Intel® Xeon® CPU E5-2603 v3 @ 1.60GHz
系统类 型:64位操作系统,基于X64的处理器 windows10 专业版
通过千问获得代码:
cpp
%% 高频注入 (HFI) 无位置传感器控制仿真示例
% 原理:脉振高频电压注入法 (Pulsating HFI)
% 适用:低速/零速下的 PMSM 转子位置估算
clear; clc; close all;
%% 1. 参数设置
fs = 20e3; % 控制频率 (Hz)
Ts = 1/fs; % 采样时间
T_sim = 0.5; % 仿真总时间 (s)
t = 0:Ts:T_sim-Ts; % 时间向量
N = length(t);
% 电机参数 (简化模型用)
Ld = 0.005; % d轴电感 (H)
Lq = 0.008; % q轴电感 (H) (假设 Lq > Ld,表贴式则相反或相等无法使用HFI)
Rs = 0.5; % 电阻 (Ohm) - 高频下影响较小,此处忽略或简化
Pn = 4; % 极对数
% 高频注入参数
f_inj = 1000; % 注入频率 (Hz)
w_inj = 2*pi*f_inj; % 注入角频率
A_inj = 10; % 注入电压幅值 (V)
% 真实转子运动 (模拟低速旋转)
w_real_rpm = 60; % 真实转速 60 RPM
w_real_rad = w_real_rpm * 2*pi/60;
theta_real = cumsum(w_real_rad * Ts * ones(1, N)); % 真实位置累积
%% 2. 初始化变量
theta_est = 0; % 估计位置初始值
w_est = 0; % 估计速度
i_d_hf = zeros(1, N); % 高频 d轴电流响应
i_q_hf = zeros(1, N); % 高频 q轴电流响应
error_signal = zeros(1, N); % 位置误差信号
theta_est_vec = zeros(1, N); % 记录估计位置
% 滤波器参数 (简单的一阶低通滤波器用于解调后滤波)
fc_lpf = 200; % 截止频率 Hz
alpha_lpf = 2*pi*fc_lpf*Ts / (1 + 2*pi*fc_lpf*Ts);
filtered_error = 0;
% PLL 增益
Kp_pll = 500;
Ki_pll = 10000;
integrator_pll = 0;
%% 3. 主循环仿真
fprintf('开始仿真...\n');
for k = 1:N
% --- 3.1 获取当前真实位置 ---
th_true = theta_real(k);
% --- 3.2 生成注入电压 (在估计的 d-q 坐标系下) ---
% 我们在估计的 d 轴注入脉振电压: u_d_inj = A * sin(w_inj * t), u_q_inj = 0
u_d_inj = A_inj * sin(w_inj * t(k));
u_q_inj = 0;
% --- 3.3 模拟电机高频响应 (基于磁路模型) ---
% 坐标变换误差角度
d_theta = th_true - theta_est;
% 高频阻抗模型近似 (忽略电阻和反电势,仅考虑电感压降)
% 实际物理量在真实 dq 轴,但我们在估计 dq 轴注入
% 经过推导,响应电流中包含位置误差信息
% 简化计算:直接计算在估计坐标系下的高频电流响应
% 有效电感随位置误差变化
% L_sigma = (Ld - Lq) / 2
L_avg = (Ld + Lq) / 2;
L_diff = (Ld - Lq) / 2;
% 高频电流导数 di/dt = u / L_eff
% 在估计坐标系下,由于电感矩阵的非对角项,q轴会产生高频电流
% i_d_hf 主要受 Ld 影响 (近似)
% i_q_hf 包含位置误差信息: i_q_hf ~ (Ld-Lq)/LdLq * sin(2*d_theta) * integral(u_d_inj)
% 为了仿真效果,我们直接构造含有位置误差信息的响应电流
% 真实物理过程是微分方程,这里用稳态近似加速仿真演示
% d轴高频电流 (主要分量,与注入同相/滞后90度取决于模型,这里取积分关系)
% u = L * di/dt => i = 1/L * integral(u)
i_d_hf(k) = (1/Ld) * (-A_inj/w_inj) * cos(w_inj * t(k));
% q轴高频电流 (包含位置误差的关键分量)
% 幅度正比于 sin(2 * error_angle)
amp_q = (Ld - Lq) / (Ld * Lq) * (A_inj / w_inj);
i_q_hf(k) = amp_q * sin(2 * d_theta) * cos(w_inj * t(k));
% --- 3.4 信号解调 (Demodulation) ---
% 将 q轴电流乘以注入信号的载波 (sin(w_inj * t))
% 注意:相位匹配非常关键,这里假设理想匹配
demod_raw = i_q_hf(k) * sin(w_inj * t(k));
% --- 3.5 低通滤波 (LPF) ---
% 提取直流分量,即位置误差信号
filtered_error = filtered_error + alpha_lpf * (demod_raw - filtered_error);
error_signal(k) = filtered_error;
% --- 3.6 锁相环 (PLL) 更新估计位置 ---
% 误差驱动 PLL
% d_theta_est/dt = Kp * error + Ki * integral(error)
prop_term = Kp_pll * error_signal(k);
integrator_pll = integrator_pll + Ki_pll * error_signal(k) * Ts;
w_est = prop_term + integrator_pll;
theta_est = theta_est + w_est * Ts;
% 限制角度在 -pi 到 pi
theta_est = mod(theta_est + pi, 2*pi) - pi;
theta_est_vec(k) = theta_est;
end
fprintf('仿真结束。\n');
%% 4. 绘图结果
figure('Name', 'HFI 位置估算仿真', 'Color', 'w');
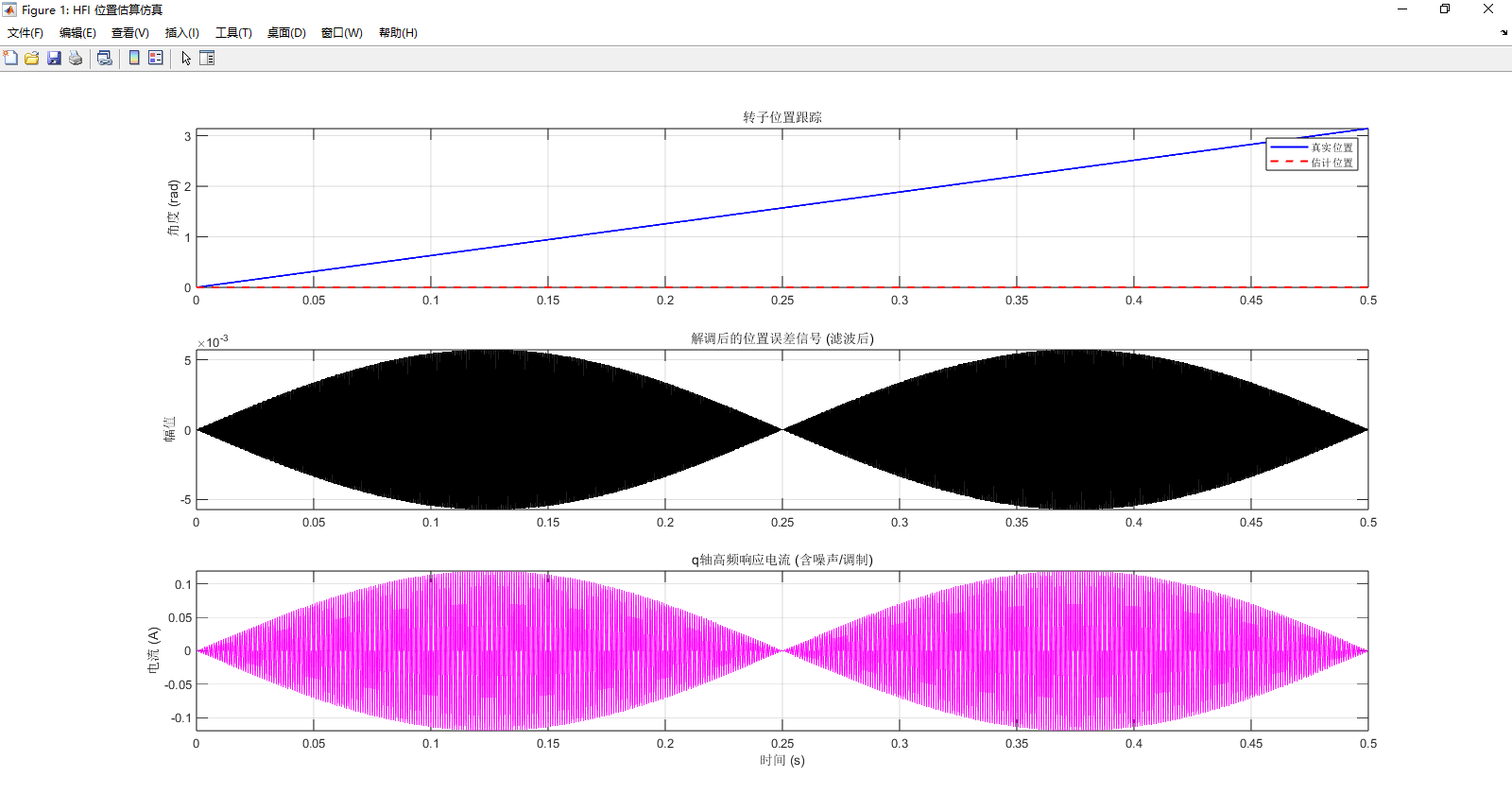
subplot(3,1,1);
plot(t, theta_real, 'b', 'LineWidth', 1.5); hold on;
plot(t, theta_est_vec, 'r--', 'LineWidth', 1.5);
legend('真实位置', '估计位置');
title('转子位置跟踪');
ylabel('角度 (rad)');
grid on;
subplot(3,1,2);
plot(t, error_signal, 'k', 'LineWidth', 1);
title('解调后的位置误差信号 (滤波后)');
ylabel('幅值');
grid on;
subplot(3,1,3);
plot(t, i_q_hf, 'm', 'LineWidth', 0.8);
title('q轴高频响应电流 (含噪声/调制)');
ylabel('电流 (A)');
xlabel('时间 (s)');
grid on;
% 误差分析
final_error = abs(theta_real(end) - theta_est_vec(end));
fprintf('最终位置误差: %.4f rad (%.2f 度)\n', final_error, rad2deg(final_error));运行结果: