随着低空经济加速落地,eVTOL(电动垂直起降飞行器)作为核心载体,正从实验室走向商业化落地。而动力系统作为eVTOL的"心脏",其性能直接决定飞行器的续航、载荷、安全性与适航合规性------从旋翼拉力的动态波动到机身姿态的力矩平衡,每一项数据都需要精准捕捉。

配套 国产eVTOL(图片来自网络)
在动力测试环节,"力与力矩测量"是核心痛点,而六分量天平和普通力传感器作为两种主流测试传感器,常常让测试工程师陷入选择困境:选前者嫌成本高、操作复杂,选后者又怕满足不了测试精度与场景需求。
今天,我们就跳出"参数堆砌",从eVTOL动力测试的实际场景出发,拆解两者的核心差异、适配场景,帮你快速找到最适合的选型方案,避开测试误区。
一、基础概念:它们到底是什么?
什么是普通力传感器?
普通力传感器(通常指单分量力传感器)是一种将质量信号转变为可电信号输出的装置。它的工作原理基于应变效应:当外力作用时,传感器内部的弹性体会发生微小形变,贴附其上的应变计电阻随之改变,通过惠斯通电桥电路将这种电阻变化转换为电信号输出。
简单来说,一个普通力传感器只能测量一个方向的力或力矩。如果你需要同时测量拉力和扭矩,就需要使用多个传感器组合安装。
什么是六分量天平?
六分量天平(又称风洞天平或六维力传感器)是一种能够同时测量三个方向的力(升力/拉力、阻力、侧向力)和绕三个轴的力矩(滚转力矩、俯仰力矩、偏航力矩)的精密测量设备。
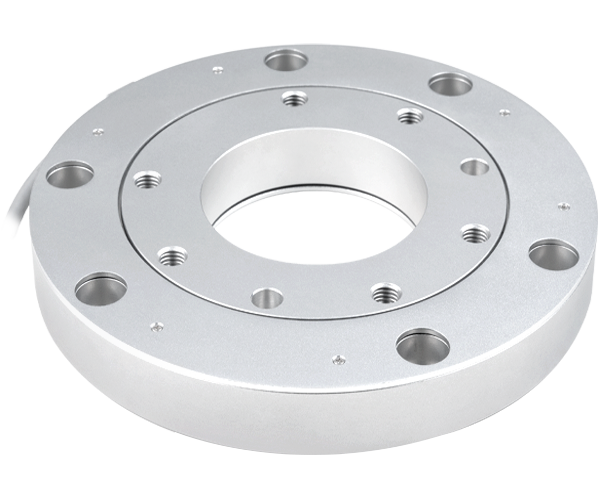
配图 六分量天平(图片来自网络)
它相当于将多个力传感器集成到一个精密结构中,通过巧妙的设计和复杂的解耦算法,实现六个分量的同步测量。
在旋翼飞行器风洞试验中,六分量天平是实现气动性能评估、新型旋翼气动布局设计的关键设备,能精确测量旋翼的拉力、扭矩等物理量,为旋翼拉力系数、悬停效率的计算提供依据。
二、核心差异对比

表:六分量天平和力传感器对比表
三、技术原理深度解析
普通力传感器的工作原理
普通力传感器通常采用单分量测量单元设计。以应变式传感器为例,其核心是一个精心设计的弹性体,在受力时产生形变,粘贴其上的应变片将形变转换为电阻变化,通过电桥电路输出电信号。
单分量天平的测量力素单元是唯一的,所以不存在耦合问题,这是它最大的结构优势。但在测量多个力素时需多个测量单元组合,结构安装不方便。
六分量天平的测量原理
六分量天平的设计要复杂得多。以一体式旋翼天平为例,它通过巧妙布置多个测量元件来实现六分量测量:
典型结构:浮动环嵌套在固定环中,两者之间仅通过Y向、Z向、X向测量元件连接为整体结构。每个方向的测量元件都经过专门设计,只敏感特定方向的力。
测量元件的分工:
Y向测量元件:测量拉力Fy、俯仰力矩Mz、滚转力矩Mx
X向测量元件:测量阻力Fx、偏航力矩My
Z向测量元件:测量侧向力Fz
组桥方式:每个测量元件上粘贴应变计并组成惠斯通电桥。例如,Y向测量元件有四组,每组元件上布置一组电桥,共四组电桥分别对应不同的分量测量。
一体式的优势:采用一体式结构设计,将旋翼天平各个部分紧凑布置、巧妙设计,既满足了小型化要求,又避免了装配式结构制造误差带来的非线性、迟滞、不回零的问题。
四、各自的优势和劣势
六分量天平的优势
-
测量的完整性能够同时捕捉所有六个力和力矩,这对于分析旋翼/螺旋桨的空气动力学特性至关重要。在旋翼气动性能风洞试验中,六分量天平可以获取旋翼拉力、扭矩等物理量,为旋翼拉力系数、悬停效率的计算提供依据。
-
揭示耦合效应能够测量各力之间的相互影响。例如,当飞行器前飞时,气流不对称会导致旋翼产生额外的俯仰力矩,只有六分量天平才能精确捕捉这种复杂气动现象。
-
数据天然同步由于六分量数据来自同一设备,不存在多传感器组合时的同步问题,数据的一致性和可信度更高。
-
安装便捷以倾转旋翼无人机测试为例,六分量应变天平设置在试验台架的顶端,短舱支座设置在六分量天平的顶端,待测旋翼短舱直接安装即可,无需复杂的多传感器对心调试。
六分量天平的劣势
-
维间耦合问题多分量天平存在固有的维间耦合------不同轴向之间的测量会相互干扰,需要通过复杂的解耦算法和专业的标定来修正。分体式六分量天平在设计时通过正交薄壁结构尽可能减小耦合干扰,但无法完全消除。
-
标定复杂六分量天平的标定过程远比单分量传感器复杂,需要专业的标定设备和专业的标定流程。
-
成本较高无论是采购成本还是维护校准成本,都高于普通力传感器。
-
对环境要求高对安装平台的刚度、水平度以及环境温度、振动都有严格要求。
-
单维绝对精度相对较低,通常为0.2%---0.3%F.S.甚至更低,且随着天平量程的增加,天平的精度等级会下降,而普通传感器并没有这个问题。同时因为天平内部的结构复杂,对环境温度变化更敏感,温漂控制难度高。
普通力传感器的优势
-
无耦合问题单分量天平的测量力素单元是唯一的,所以不存在耦合问题,测量结果直接可靠。
-
结构简单设计和制造相对简单,技术成熟度高。
-
成本较低单只传感器成本远低于六分量天平。
-
标定简单标定过程简单,无需复杂的多维标定设备。
-
单维精度极高,可达0.02%---0.05%F.S.,且温度稳定性好,抗过载能力强,非常适合测量单一方向的纯净力。
普通力传感器的劣势
-
信息片面要测量多个力素时需多个测量单元组合,但组合后结构安装不方便。而且组合测量难以获得完整的六分量数据。
-
组合误差多个传感器组合安装会引入机械安装误差,各传感器的对心、垂直度等都会影响最终测量精度。
-
无法测量力矩普通力传感器无法直接测量力矩,需要通过多个传感器的组合计算得到,精度和可靠性不如直接测量。
-
数据同步问题多个传感器独立输出,需要考虑数据同步采集的问题,否则会影响力矩计算的准确性。
五、在eVTOL动力测试中的实际应用
eVTOL动力测试的特殊性
eVTOL的动力系统测试比传统无人机复杂得多。专业的eVTOL倾转动力测试台架需要同时测量动力系统拉力、扭矩、转速、电压、电流等多种参数,最大测试功率可达200-300KW,测试螺旋桨最大直径可达100英寸以上。
更重要的是,eVTOL常常涉及倾转机构------旋翼短舱需要在不同角度下工作,这就要求测量设备能够适应倾转工况,测量不同姿态下的气动力参数。
eVTOL动力测试的场景差异极大,从实验室原型测试到量产质检,从单一部件测试到整机适航测试,不同场景的需求决定了选型方向。我们分3种核心场景,给出明确建议:
场景1:部件级静态测试(低成本、简单需求)
适用场景:电机静态拉力、扭矩测试、疲劳测试等,核心需求是"测量单一方向的力",无动态载荷、无复杂力矩干扰,且预算有限。
选型建议:优先选普通力传感器。
理由:这类场景不需要测量力矩,普通力传感器的精度完全够用,且成本低、操作简单,能快速完成测试任务。比如测试旋翼静态拉力时,选用应变式拉力传感器,搭配简单的数据采集模块,就能精准获取拉力数据,无需投入六分量天平的高额成本。

配图 静态拉力测试
场景2:动力系统动态测试(核心场景、精准需求)
适用场景:旋翼动态拉力测试倾转动力系统测试、电机扭矩与拉力同步测试等,核心需求是"捕捉动态载荷、全维度受力",需获取力与力矩的同步数据。

配图 joby eVTOL
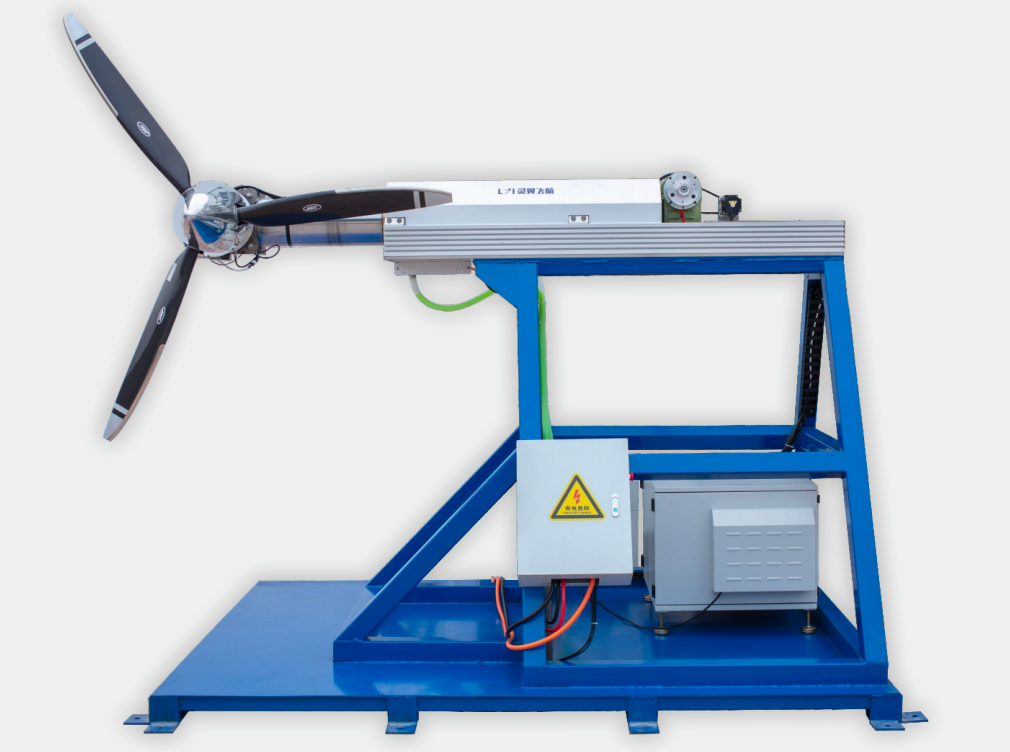
配图 倾转动力台架(六分量天平)
选型建议:必须选六分量天平。
理由:eVTOL的动力系统(尤其是旋翼、倾转机构)在工作时,不仅会产生轴向拉力,还会因高频振动、气流干扰产生侧向力、滚转力矩等,普通力传感器只能捕捉单一方向的力,无法反映真实受力状态,会导致测试数据失真,进而影响动力系统优化与安全评估。
比如倾转动力测试中,六分量天平可同步采集倾转过程中的拉力、侧向力以及俯仰力矩,精准反映倾转机构的受力变化,为机构优化提供完整数据支撑;而普通力传感器只能测量拉力,无法捕捉倾转时的力矩干扰,测试数据毫无参考价值。
场景3:整机级适航测试(合规需求、高要求)
适用场景:eVTOL整机气动载荷测试、飞行姿态力矩测试、结构疲劳测试等,核心需求是"高精度、全维度、可追溯",测试数据需用于民航局适航认证,是商业化落地的关键环节。
选型建议:优先选高精度六分量天平,且需搭配无线数据采集系统。
理由:适航认证对动力测试数据的精度、完整性要求极高,需要完整的力与力矩数据链来验证飞行器的安全性与可靠性。六分量天平可实现"拉力+应变+振动"多源数据同步采集,同步精度可达10μs,能精准关联旋翼载荷与结构应力,为适航取证提供关键数据支撑。
同时,eVTOL机身结构紧凑,传统有线测试设备布线会破坏气动布局,搭配无线采集模块的六分量天平,可实现微型化部署,避免布线干扰,适配低空复杂环境下的测试需求。
六分量天平和普通力传感器,如同全知者与专注者------一个能洞察一切细微的气动特性,一个专注于单一的力值测量。在eVTOL动力测试中,它们各有各的用武之地,没有绝对的优劣,只有是否适合。
选择哪一种,取决于你要解决什么问题。六分量天平是"全"的代表,适合深入的气动研究;普通力传感器是"专"的典范,适合高效的生产管控。对于完整的eVTOL研发流程,两者往往需要结合使用,共同支撑从设计到量产的整个链条。