第13章 Mission Planner 入门与界面总览
13.1 概述
Mission Planner是ArduPilot固件生态中最成熟、功能最完善的地面站软件(Ground Control Station, GCS)。它运行于Windows平台,集固件烧录、传感器校准、参数调校、任务规划、实时监控与日志分析六大功能于一身,是飞控开发者与四旋翼无人机飞手完成从"首次上电"到"首飞调试"全过程的必备工具。
📌 与其他章节的衔接:本章所涉及的固件烧录、端口配置和参数初始化,是第1章"硬件-固件-地面站三层关系"中的具体软件实践环节。后续章节将在此基础上展开:第14章(飞行监控与实时数据显示)、第15章(任务规划与自动飞行)、第16章(高级配置与调试工具)则分别对应本章"飞行数据""飞行计划""配置/调试"三大核心页面的深入展开。
13.2 Mission Planner 下载与安装
13.2.1 系统要求与准备工作
Mission Planner 专为 Windows 系统设计,因此需要一台运行 Windows 10 或 Windows 11 的电脑,并能够访问互联网(用于在线下载固件和更新)。另外还需要具备管理员权限,以完成驱动程序的安装。
在安装之前,需要确认电脑已经安装了.NET Framework 4.6.2或更高版本。如果尚未安装,可以前往微软官方网站下载并安装。对于某些电脑,安装时还需要手动允许驱动安装(如 CP210x、STM32 等虚拟串口驱动),并在 Windows 防火墙弹出提示时允许 Mission Planner 在"专用网络"上通信,以便后续使用 UDP/SITL 仿真功能。
13.2.2 下载与安装步骤
第一步:下载 Mission Planner 安装包
Mission Planner 是开源软件,其全部安装包都托管在 ArduPilot 组织的官方固件服务器上。最新版本的稳定版 MSI 安装包可以随时从以下链接获取:
🔗 下载地址 : https://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi
官方说明建议大家优先选择稳定版( Stable **)**而非 Beta 版,以确保飞行调试过程的可靠性。
第二步:运行安装程序
找到下载好的 .msi 文件,在资源管理器中右键点击该文件,选择 " 以管理员身份运行"。
安装程序启动后,按照以下流程操作:点击 Next,勾选"I accept the terms in the License Agreement",再次点击 Next;选择安装路径(通常保持默认即可),点击 Next;点击 Install,随后系统会弹出用户账户控制提示,询问是否允许此应用对设备进行更改,点击 " 是" 继续安装。
第三步:安装驱动程序
安装程序会自动弹出 " 设备驱动程序安装向导" 。这个步骤非常关键------这些驱动程序负责让飞控通过 USB 连接后在 Windows 的设备管理器中显示正确的 COM 端口。向导弹出后,直接点击 下一页,系统会自动安装 CP210x、STM32 等飞控常用的驱动,直到显示完成,点击 Finish 即可。
如果日后发现飞控插入电脑后,设备管理器中显示"未知设备"并伴有黄色感叹号,通常是因为驱动程序被安全软件误删或拦截。此时只需重新运行 Mission Planner 安装程序(或单独下载驱动),重装驱动即可恢复。
第四步:完成安装并首次启动
驱动安装完成后,安装程序会回到 Mission Planner 的 Setup 向导界面,等待进度条走完,最后点击 Finish 即可。此时可以勾选 Launch Mission Planner 直接打开软件。
首次启动时,可能会弹出登录对话框,直接点击 No 即可。Mission Planner 支持登录云端同步任务规划,但对于初次使用或本地调试的场景,登录不是必需的,后续也不会再弹出该登录提示。另外,Mission Planner 不会自动在电脑桌面生成快捷方式,可以在 Windows 开始菜单中查找并启动。
🛠️ 故障排查提示:飞控通过 USB 连接后,如果在 Mission Planner 右上角的 COM 端口下拉列表中找不到对应端口,或设备管理器中端口显示黄色感叹号,通常有两种原因:一是 USB 数据线质量较差(只充电不能传数据),建议更换高质量数据线;二是驱动未正确安装,此时只需重新运行 Mission Planner 安装程序,在驱动安装向导过程中完成驱动重装即可。
13.3 主界面布局详解
13.3.1 总体布局
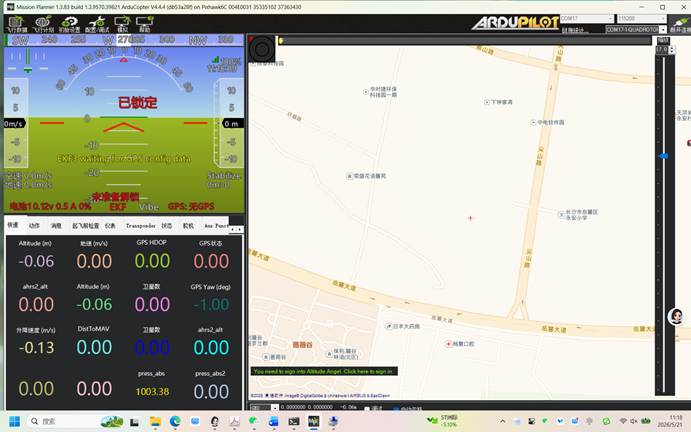
成功启动 Mission Planner 后,打开主界面。Mission Planner 的整体布局分为四个主要区域:顶部的功能导航菜单栏 (Flight Data / Flight Plan / Initial Setup / Config/Tuning / Simulation / Help)、中间右侧的地图显示区 (可切换卫星/普通地图或 terrain 视图)、中间左侧底部的飞行仪表与状态栏 (HUD姿态球、空速/地速、电池状态、GPS状态等)、中间的快速面板( Quick ) (用于实时监控自定义参数)以及底部的状态栏(显示飞控连接状态与遥测链路信息)。
Mission Planner 将众多配置、调校和调试功能组织在六个顶层菜单项中:
- 飞行数据(Flight Data ) :飞行监控主界面,集成了 HUD 仪表、地图视图、遥测数据显示和快速面板。
- 飞行计划(Flight Plan ) :用于创建、编辑和上传自主飞行航线,也用于设置地理围栏和 Rally 归航点。
- 初始设置(Initial Setup ) :负责"必须校准"的硬件任务,包括安装固件、加速度计校准、罗盘校准、遥控器校准、飞行模式设置等。
- 配置/ 调试(Config/Tuning ) :负责飞行行为和软件级的高级调校,包括 PID 调参、全部参数表、扩展卡尔曼滤波(EKF)配置等。
- 模拟(Simulation ) :连接飞行模拟器(如 SITL),进行硬件/软件在环仿真,用于无硬件的飞行调试。
- 帮助(Help ) :提供软件版本信息、用户手册链接和社区支持入口。
📌 章节衔接提醒 :本章将逐一介绍这六个菜单的整体功能定位。其中"初始设置"页面中的固件烧录在 13.4 节单独详述,"配置/调试"中的串口参数配置在 13.5 节展开。第14章将围绕 " 飞行数据" 做完整的监控与遥测讲解;第15章将围绕 " 飞行计划" 做任务规划与自动飞行的讲解;第16章将围绕 " 配置/ 调试" 与 " 模拟" 做高级配置与调试工具的详细展开。
13.3.2 连接区域(右上角)
在顶部导航菜单的右侧,是用于连接飞控的区域。连接前需先通过 USB 线将飞控连接到电脑,然后在 "COM 端口(COM )" 下拉菜单中选择飞控对应的 COM 端口号(可在 Windows 设备管理器的"端口(COM 和 LPT)"中查看),在 " 波特率(Baud )" 下拉菜单中选择 115200(USB 连接的默认波特率),点击 " 连接(CONNECT )" 按钮,即可建立地面站与飞控之间的通信。
连接成功后,界面会发生几个重要变化:左下角的状态栏会从"未连接"变为绿色指示灯,显示"已连接";HUD 仪表开始刷新飞控的姿态、高度和速度数据;飞控内存储的全部参数会自动下载并缓存至 Mission Planner。飞控通过 USB 连接时,建议不要同时安装电池供电------ArduPilot 的故障保护逻辑中,USB 供电时默认以"台架调试模式"运行,电池故障保护会被暂时禁用,以防在调试阶段因电池电压误报而触发不必要的紧急降落或返航。
13.3.3 菜单详解
飞行数据(Flight Data )
飞行数据是连接飞控后默认打开的界面,其主要作用是在试飞前后实时监控飞行器的飞行数据和遥测状态。
- 仪表盘区域(HUD ) :界面左半部分上方显示飞行仪表,包括姿态方向球(显示当前的横滚/俯仰/偏航角)、空速/地速、垂直速度、海拔高度以及电池电压/电流/剩余电量百分比。
- GPS 状态栏(HUD 下方) :位于 HUD 姿态球正下方,实时显示 GPS 卫星数量、3D Fix 状态以及 HDOP(水平精度因子)等重要定位信息。
- 快速面板(Quick ) :位于 HUD 下方左侧、GPS状态栏右侧的白色可配置区域。用户可以在此添加需要重点关注的状态参数(如 satcount、gps0.hdop、ekf3.vibe 等),省去反复切换页面的麻烦。
- 消息区域(Messages ) :右侧消息面板显示飞控上报的各类信息,包括 PreArm 报错(如 PreArm: GPS not healthy)、传感器校准提醒、故障保护触发状态等。
- 地图区域:界面右半部分显示 2D/3D 地图,以及飞行器的实时位置、飞行轨迹和任务航点。
飞行计划(Flight Plan )
飞行计划菜单专用于飞行任务(Mission)的创建、编辑、上传和执行监控,以及地理围栏(Fence)和 Rally 归航点的设置。在地图上通过鼠标点击,用户可以依次添加航点(Waypoint)、起飞点(Takeoff)、降落点(Land)、盘旋等待点(Loiter)等任务元素,并调整每个航点的高度、逗留时间、航向等参数。完整的任务规划文件可以保存为 .waypoint 或 .mission 格式,以备重复使用。

📌 章节衔接 :飞行计划的详细操作方法将在 第15 章 任务规划与自动飞行 中系统介绍,包括各航点命令的详细参数含义、任务文件管理与上传下载、以及任务执行中的遥测监控方法。
初始设置(Initial Setup )
初始设置菜单负责"必须完成"的硬件初始化和校准任务,是所有新装四旋翼在首飞之前必须经过的配置环节。
该菜单主要包含以下几项核心功能,详细校准流程已在第 11 **章(固件校准完全指南)**中以统一的"逻辑→原理→步骤→验证"结构系统阐述:
- 安装固件(Install Firmware ) :负责向飞控硬件烧录 ArduPilot 固件(详情见下文 13.4 节)。
- 必要硬件(Mandatory Hardware ) :包含加速度计校准、罗盘校准、遥控器校准、飞行模式设置等。这部分内容的详细操作和理论原理,请回看第11章(ArduPilot 与 PX4 固件校准完全指南)中的对应小节。
- 可选硬件(Optional Hardware ) :提供 GPS、光流传感器、测距仪(激光/声纳)、空速计、电源模块等外设的配置入口,以及 DroneCAN/UAVCAN 设备的总线配置。
- Planner:设置地面站软件的通用偏好,如界面主题、单位制(公制/英制)、语言等。
配置/ 调试(Config/Tuning )
配置/调试菜单面向高级用户和飞控开发人员,用于飞行行为调优和飞行参数定制。
- 基本调参(Basic Tuning ) :提供简化版 PID 调参界面,适合初学者快速上手。
- 扩展调参(Extended Tuning ) :提供姿态控制器(ATC_* 系列)、位置控制器(PSC_* 系列)等高阶 PID 调参入口。
- 全部参数表(Full Parameter List ) :以表格形式列出飞控中的所有参数(数千个),支持搜索、逐个修改和保存。
- 参数树(Parameter Tree ) :将全部参数按照功能模块分组(如 INS_、EK3_、SERIAL_ 等),以树状结构呈现,便于按类别浏览和修改。
- 标准参数(Standard Params ) :展示常用参数,算是全部参数表和参数树之间的折中选择。
- 地理围栏(GeoFence ) :设置飞行器的空间限制范围,避免飞出预设区域。
- 空中仿真(SITL ) :启动软件在环仿真环境,用于无硬件条件下的算法开发和测试。
📌 章节衔接 :配置/调试菜单中的高级配置工具(全部参数表、参数树、PID调参、地理围栏、EKF参数配置等)将在 第16 章 高级配置与调试工具 中与仿真工具一起做系统性的深入讲解。
模拟(Simulation )与帮助(Help )
模拟(Simulation ) 菜单是 Mission Planner 内置的 SITL(Software In The Loop,软件在环仿真)功能的入口。它允许开发者在完全不使用实体飞控硬件的情况下,在一台电脑上模拟整个 ArduPilot 飞控的运行环境。同时使用 Mission Planner 地面站和 SITL 仿真的流程为:在模拟菜单中选择机型(如 Copter)和启动参数,Mission Planner 将自动在后台启动一个虚拟飞控进程,用户在前端的"飞行数据"或"飞行计划"页面连接 SITL 的 UDP 端口后,即可像连接实体飞控一样进行参数修改、航线规划、模拟飞行和故障注入测试。
帮助(Help ) 菜单提供 Mission Planner 的版本信息、用户手册链接和社区支持入口。当遇到软件使用问题或飞控连接异常时,可以首先通过帮助菜单查看内置文档或跳转至 ArduPilot 官方论坛寻求帮助。
13.4 固件烧录(Firmware Upload)
13.4.1 烧录前的准备工作
在首次将飞控连接到 Mission Planner 时,飞控硬件上尚未烧写任何 ArduPilot 固件(或者烧录的固件版本不合适),此时需要先完成固件烧录操作,才能在"配置/调试"和"飞行数据"中正确读取飞控参数。
烧录前必须确认飞控仅由 USB 线供电,不能连接电池、 GPS 、数传等任何外部设备,以避免固件烧录过程中因供电不稳定或外设干扰导致烧录失败。
📌 板型检测与固件自动匹配:当飞控通过 USB 连接到电脑后,Mission Planner 会通过读取飞控的硬件 ID 和 Bootloader 信息来自动识别板卡型号(如 Pixhawk 6X、CUAV V5+ 等)。在"初始设置 → 安装固件"页面中,Mission Planner 会结合检测到的板卡型号和用户在界面中选择的机架类型图标(Copter / Plane / Rover 等),从 ArduPilot 官方固件服务器自动拉取对应板型的固件文件。
13.4.2 在线烧录(推荐)
在线烧录是 Mission Planner 官方推荐的固件安装方式,使用起来非常方便。在烧录过程中,必须确保电脑处于联网状态(以在线下载固件包)。
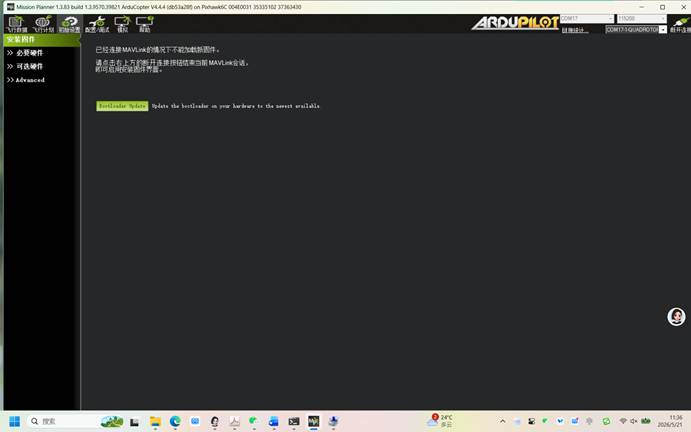
打开 Mission Planner,进入 " 初始设置(Initial Setup )" → " 安装固件(Install Firmware )" 页面。此时界面上会显示多个机架类型的图标,包括:多旋翼(Copter)、固定翼(Plane)、无人车(Rover)、直升机(Heli)、水下机器人(Sub)和天线跟踪器(Antenna Tracker)。根据你实际使用的飞行器类型,点击对应的图标------四旋翼请点击 Copter 图标。
点击图标后,Mission Planner 会弹出一个确认窗口,询问"升级到 xxx OFFICIAL?"(其中 xxx 是固件类型与版本号)。点击 Yes,软件开始从 ArduPilot 官方固件服务器下载该机型的固件。
下载完成后,Mission Planner 会弹出一个提示框,要求拔掉飞控的 USB 连接线(提示"Please unplug the board for the next step")。按照提示执行如下操作:① 拔掉飞控的 USB 数据线;② 点击 OK 按钮;③ 在 30 秒内重新插入 USB 线。飞控进入烧录模式后,左下角的进度条会从 0 走到 100,最终显示 "Upload Done" 即表示固件烧录成功。
固件烧录完成后,在 Mission Planner 右上角选择正确的 COM 端口和波特率(115200),点击 CONNECT 连接飞控,即可看到 HUD 仪表开始刷新,表示飞控已经正常运行 ArduPilot 固件。
13.4.3 本地烧录(离线/自定义固件)
如果需要烧录非官方发布的固件(例如自行编译的定制固件,或由硬件厂商提供的特定固件),可以使用本地烧录方式。在"安装固件"页面中,点击右下角的 " 加载自定义固件(Load Custom Firmware )" 按钮。
在弹出的文件选择窗口中,浏览并选择本地的 .apj 或 .px4 格式固件文件(自定义固件的后缀因编译配置而异),点击打开即可进入与在线烧录流程类似的步骤:进度条走完后显示"Upload Done",即表示自定义固件烧录完成。
13.4.4 常见问题与对策
在烧录过程中可能会遇到以下几种异常情况,相应的解决方法如下:
- 设备管理器中无端口显示:通常表示 USB 线仅能充电、无法传输数据,或飞控未正常上电。解决方法:更换高质量的 USB 数据线,尝试更换电脑 USB 接口(避免使用机箱前面板供电较弱的接口)。
- 端口显示黄色感叹号:表示驱动程序未正确安装或已被破坏。解决方法:重新运行 Mission Planner 安装程序以重装驱动,或手动更新 STM32/CP210x 的驱动程序。
- ERROR: No Response 错误:此错误多见于拔插 USB 线的操作时机不当,或数据线过长/质量不佳。解决方法:严格按照提示"先拔线→点击 OK→再插线"的顺序操作;必要时更换更短、质量更优的 USB 数据线,并断开 GPS、数传等所有外设后重试。
- 在线下载失败:多为网络不通畅所致。解决方法:使用手机热点临时联网重试,或改用"本地烧录"方式。
13.5 飞控连接与基础通信设置
13.5.1 USB 连接
飞控固件烧录完成后,下一步就是建立地面站与飞控之间的通信连接。对于首次调试,USB 连接是最便捷的方式。
- 使用 USB 数据线连接飞控和电脑。
- 在 Mission Planner 的右上角,点击 COM 端口下拉菜单,选择飞控对应的 COM 端口号。可以在 Windows 设备管理器的"端口(COM 和 LPT)"列表中查看新出现的 COM 端口。
- 在"Baud"(波特率)下拉菜单中选择 115200(这是 USB 连接的标准速率)。
- 点击 CONNECT 按钮。
- 连接成功后,Mission Planner 状态栏的红色指示灯变为绿色,显示"Connected",HUD 仪表开始刷新飞控数据,右侧消息区域显示"Got param"等参数同步完成的日志信息。
📌 技术细节:Mission Planner 与飞控之间的通信,从软件架构上看,正是第1章中"MAVLink 协议作为地面站与固件之间的桥梁"这一理念在操作层面的具体体现。飞控的 USB 虚拟串口(即 Serial0 端口,SERIAL0_PROTOCOL 默认为 1 即 MAVLink1,且兼容 MAVLink2)与 Mission Planner 通过 MAVLink 协议进行双向通信。飞控以每秒数十次的速率持续向上发送遥测数据(如姿态、GPS、电池状态等),Mission Planner 则通过该链路向下发送参数修改、航点上传和执行命令。
13.5.2 串口参数配置(SERIALx_PROTOCOL 与 SERIALx_BAUD )
ArduPilot 飞控的每个物理串口(Telem1/Telem2/GPS1/GPS2 等)都有对应的参数,用于定义该端口的功能协议和通信速率。Pixhawk 系列飞控上,USB 口对应 SERIAL0,Telem1 对应 SERIAL1,Telem2 对应 SERIAL2,GPS1 对应 SERIAL3,GPS2 对应 SERIAL4。
对于四旋翼平台,以下几个端口的配置最为关键,各端口的默认协议与用途如下表所示:
| 端口 | 串口参数 | SERIALx_PROTOCOL 协议 | SERIALx_BAUD 常用速率 | 典型用途 |
|---|---|---|---|---|
| USB | SERIAL0 | 1(MAVLink1,同时兼容 MAVLink2) | 115200 | 地面站 USB 调试 |
| GPS | SERIAL3(Pixhawk 6C 的 GPS1 端口) | 5(GPS) | 38400 或 115200 | 连接 GPS 接收机 |
| Telem1 | SERIAL1 | 2(MAVLink2) | 57600 或 115200 | 连接数传电台或机载计算机 |
| Telem2 | SERIAL2 | 2(MAVLink2) | 57600 或 115200 | 连接数传电台 |
这些参数可以在 Mission Planner 的 " 配置/ 调试(Config/Tuning )" → " 全部参数表(Full Parameter List )" 页面中进行修改。对于 GPS 端口,请务必将 SERIAL3_PROTOCOL 设置为 5 (GPS ),否则飞控将无法解析来自 M9N 等 GPS 模块的 NMEA 或 UBX 协议数据。
13.5.3 串口参数配置(SERIALx_PROTOCOL 与 SERIALx_BAUD)
在早期版本的 Mission Planner 中,"初始设置 → 可选硬件"下曾有一个 "Serial Ports" 图形化配置界面,可以直观地为每个物理串口选择协议和波特率。但在当前主流版本(如 1.3.83 及以上)中,该界面已经被移除,相关功能统一整合到参数配置系统中。因此,配置飞控串口(如 GPS 端口、数传端口)的正确方法有两种:通过 " 全部参数表" 或 通过" 参数树"。这两种方法均适用于所有版本,且不受界面改版影响。
方法一:通过" 全部参数表" 配置(通用,推荐)
- 在 Mission Planner 顶部菜单栏点击 " 配置/ 调试" → " 全部参数表"。
- 在参数表上方的搜索框中输入 SERIAL,所有与串口相关的参数将自动筛选出来。
- 找到您需要配置的端口对应的参数:
- 协议参数:SERIAL0_PROTOCOL、SERIAL1_PROTOCOL、SERIAL2_PROTOCOL、SERIAL3_PROTOCOL ......
- 波特率参数:SERIAL0_BAUD、SERIAL1_BAUD、SERIAL2_BAUD、SERIAL3_BAUD ......
- 在"值"列中,为每个参数选择或输入正确的数值:
- 协议:常见值有 1(MAVLink1/2)、2(MAVLink2)、5(GPS)、8(数传)等。
- 波特率:常见值有 115200(USB 默认)、57600、38400(多数 GPS 默认速率)。
- 修改完成后,点击窗口下方的 " 写入参数" 按钮。
- 重新给飞控断电再上电,使新参数生效。
📌 提示:对于连接在 GPS1 端口的 M9N 模块,请确保 SERIAL3_PROTOCOL = 5(GPS),SERIAL3_BAUD = 38400 或模块实际配置的波特率。
方法二:通过" 参数树" 配置(按功能分组,便于浏览)
如果您希望按模块分类查看参数,"参数树"界面更为直观。
- 点击 " 配置/ 调试" → " 参数树"。
- 在左侧树形列表中,找到并展开 "SERIAL" 文件夹。
- 您将看到所有串口参数的详细列表,包括 SERIAL0_PROTOCOL、SERIAL0_BAUD 等。
- 双击每个参数的值列进行修改。
- 修改完毕后,点击 " 写入参数" ,然后 重启飞控。
验证配置
参数修改并重启飞控后,可以按照以下步骤验证配置是否正确:
| 验证项 | 操作 | 预期结果 |
|---|---|---|
| 协议生效 | 重新连接 Mission Planner,进入"全部参数表"查看刚才修改的 SERIALx_PROTOCOL | 参数值保持为您设置的值,未被重置为默认值 |
| GPS 数据接收 | 将飞控置于室外开阔地,观察 HUD 下方的 GPS 状态栏 | 显示"3D Fix"及卫星数、HDOP 数值 |
| 数传通信(如有) | 连接数传电台,观察地面站是否持续收到遥测数据 | HUD 仪表数据正常刷新,无断流提示 |
⚠️ 注意:如果您在"全部参数表"中修改了 SERIAL3_PROTOCOL,但重启后该参数自动恢复为 0 或其他值,通常是因为飞控没有检测到 GPS 模块,或模块的波特率与飞控不匹配。请检查接线和 GPS 模块的供电。
通过上述两种方法,您可以完全绕过旧版图形界面,在任何版本的 Mission Planner 中精准地配置飞控的所有串口。对于需要频繁切换协议或调试外设的情况,推荐使用"全部参数表"+ 搜索功能,效率最高。
13.5.4 连接验证流程
在完成飞控连接后,建议按照以下流程验证通信状态和基本传感器数据:
| 验证步骤 | 操作 | 预期结果 |
|---|---|---|
| 步骤1 :连接状态 | 点击 CONNECT 后等待 3--5 秒 | 状态栏绿色指示灯亮起,消息区显示已成功读取参数 |
| 步骤2 :HUD 姿态验证 | 手动倾斜飞控,观察 HUD 姿态球变化 | 横滚/俯仰角度随飞控倾斜同步变化 |
| 步骤3 :气压计验证 | 将飞控抬高约 0.5 米,观察 HUD 高度显示 | HUD 显示的相对起飞点高度随高度变化而变化(有约 0.5 米的增量变化) |
| 步骤4 :GPS 状态验证 | 在室外开阔地观察 GPS 状态栏 | 显示"3D Fix"且卫星数 ≥6、HDOP ≤2.0 |
| 步骤5 :参数同步验证 | 进入"全部参数表",搜索任意参数(如 GPS_TYPE) | 搜索结果显示该参数的当前值 |
| 步骤6 :版本验证 | 查看 HUD 右上角或连接时消息区的固件版本信息 | 显示的固件版本与预期一致(如 ArduCopter V4.4.4) |
13.6 本章小结
Mission Planner 是 ArduPilot 生态中功能最全面的地面站软件,从固件烧录、传感器校准、参数调校到任务规划与日志分析,几乎覆盖了四旋翼无人机开发的全流程。本章以"从零开始"为思路,详细介绍了 Mission Planner 在 Windows 平台上的下载安装方法、主界面六大菜单的整体功能定位、固件烧录的具体操作流程,以及 USB/串口连接的基础设置方法,并对端口相关的 SERIALx_PROTOCOL 和 SERIALx_BAUD 参数做了详细解释。掌握本章内容是顺利使用第14章(飞行监控)、第15章(任务规划)和第16章(高级调试)各项高级功能的前提。