目录
1.摘要
针对由一架载机和多架子机组成复合型无人机,本文提出了一种基于费马点分组粒子群算法(FP-GPSO),该算法结合费马点的几何特性将粒子空间分布初始化为三组,并利用全局和组内最优粒子共同引导迭代,从而同时确定空中发射位置并优化多段路径,有效避免了局部最优。仿真验证了该算法在复合型无人机路径规划上的优越性。
2.准备工作与问题描述
分段路径与环境
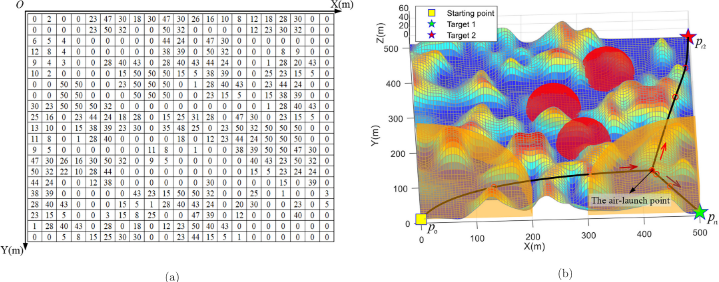
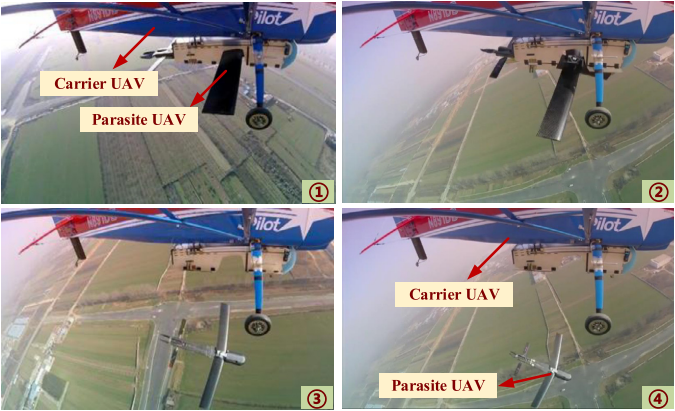
以空中发射点(ALP)为节点,复合无人机路径由连接起点 p o p_o po、ALP p s p_s ps、载机目标 p t l p_\mathrm{tl} ptl 和子机目标 p t 2 p_{t2} pt2 的三维航点串联而成。通过网格高程数据与三次样条插值构建三维环境,其任务空间 S e S_\mathrm{e} Se、可飞空间 S f S_f Sf和不可飞空间 S u S_u Su建模为:
S e = { ( x , y , z ) ∣ x min ≤ x ≤ x max , y min ≤ y ≤ y max , z min ≤ z ≤ z max } S_e=\{(x,y,z)\mid x_{\min}\leq x\leq x_{\max},y_{\min}\leq y\leq y_{\max},z_{\min}\leq z\leq z_{\max}\} Se={(x,y,z)∣xmin≤x≤xmax,ymin≤y≤ymax,zmin≤z≤zmax}
S f = { ( x , y , z ) ∣ x min ≤ x ≤ x max , y min ≤ y ≤ y max , m a p ( x , y ) ≤ z ≤ z max \boldsymbol{S}f=\{(x,y,z)\mid x{\min}\leq x\leq x_{\max},y_{\min}\leq y\leq y_{\max},map(x,y)\leq z\leq z_{\max} Sf={(x,y,z)∣xmin≤x≤xmax,ymin≤y≤ymax,map(x,y)≤z≤zmax
S u = S e − S f \boldsymbol{S}_u=\boldsymbol{S}_e-\boldsymbol{S}_f Su=Se−Sf
成本函数
本文构建了综合考虑航程、风险、载机安全及机动限制的无人机路径规划总代价函数:
f c o s t = w 1 f L + w 2 f R + w 3 f S + w 4 f T + w 5 f P + w 6 f G f_{cost} = w_1 f_L + w_2 f_R + w_3 f_S + w_4 f_T + w_5 f_P + w_6 f_G fcost=w1fL+w2fR+w3fS+w4fT+w5fP+w6fG
路径长度代价 f L f_L fL:引入费马点 p F p_F pF 并根据无人机不同形态的能耗权重 λ i \lambda_i λi进行归一化计算:
f L = ∑ i = 1 3 ∑ j = 1 N w − 1 λ i ∥ p i , j + 1 − p i , j ∥ ∥ p F − p o ∥ + ∥ p F − p t 1 ∥ + ∥ p F − p t 2 ∥ f_L = \frac{\sum_{i=1}^{3} \sum_{j=1}^{N_w-1} \lambda_i \| p_{i,j+1} - p_{i,j} \|}{\| p_F - p_o \| + \| p_F - p_{t1} \| + \| p_F - p_{t2} \|} fL=∥pF−po∥+∥pF−pt1∥+∥pF−pt2∥∑i=13∑j=1Nw−1λi∥pi,j+1−pi,j∥
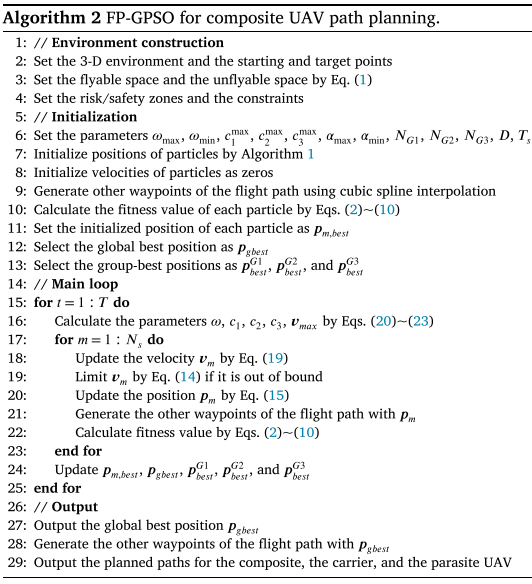
3.基于FP-GPSO算法的统一路径规划
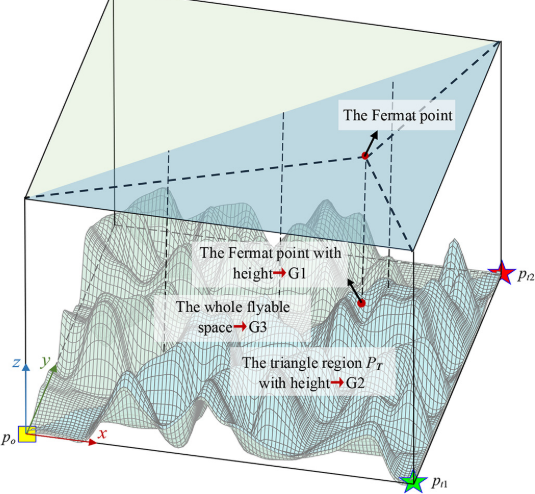
在无障碍物的平坦地形下,复合无人机的空中发射点(ALP)部署可简化为寻找二维几何中的费马点,即求解使起点和两个目标点到该点距离之和最小的先验最优位置。考虑不同航段的能耗权重 λ i \lambda_i λi 时,该点则转化为加权费马点。
基于费马点的分组初始化
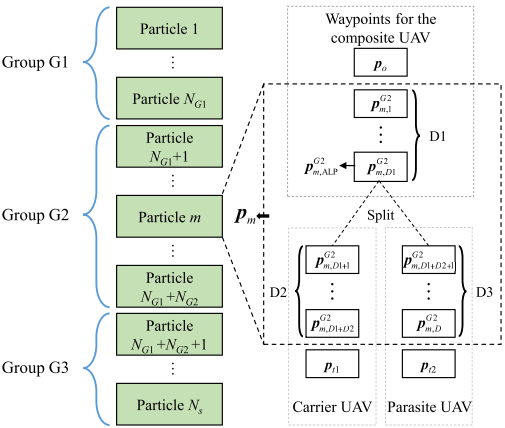
为了兼顾费马点的几何最优性与粒子多样性,算法采用分组初始化策略(总粒子数 N s = N G 1 + N G 2 + N G 3 N s = N_{G1} + N_{G2} + N_{G3} Ns=NG1+NG2+NG3),将空中发射点(ALP)分为三组:
G1组: ALP水平坐标固定为费马点 ( x F , y F ) (x_F, y_F) (xF,yF),高度在地形之上随机采样以规避碰撞:
{ x m , ALP G 1 = x F y m , ALP G 1 = y F z m , ALP G 1 ∈ ( m a p ( x m , ALP G 1 , y m , ALP G 1 ) , z max ] \begin{cases} x_{m,\text{ALP}}^{G1} = x_F \\ y_{m,\text{ALP}}^{G1} = y_F \\ z_{m,\text{ALP}}^{G1} \in (map(x_{m,\text{ALP}}^{G1}, y_{m,\text{ALP}}^{G1}), z_{\max}] \end{cases} ⎩ ⎨ ⎧xm,ALPG1=xFym,ALPG1=yFzm,ALPG1∈(map(xm,ALPG1,ym,ALPG1),zmax]
G2组: ALP随机分布在起点与两目标点构成的三角形投影区域 P T P_T PT 内,高度位于地形之上:
{ ( x m , ALP G 2 , y m , ALP G 2 ) ∈ P T z m , ALP G 2 ∈ ( m a p ( x m , ALP G 2 , y m , ALP G 2 ) , z max ] \begin{cases} (x_{m,\text{ALP}}^{G2}, y_{m,\text{ALP}}^{G2}) \in P_T \\ z_{m,\text{ALP}}^{G2} \in (map(x_{m,\text{ALP}}^{G2}, y_{m,\text{ALP}}^{G2}), z_{\max}] \end{cases} {(xm,ALPG2,ym,ALPG2)∈PTzm,ALPG2∈(map(xm,ALPG2,ym,ALPG2),zmax]
G3组: ALP在整个可飞空间 S f S_f Sf 内完全随机分布:
( x m , ALP G 3 , y m , ALP G 3 , z m , ALP G 3 ) ∈ S f (x_{m,\text{ALP}}^{G3}, y_{m,\text{ALP}}^{G3}, z_{m,\text{ALP}}^{G3}) \in S_f (xm,ALPG3,ym,ALPG3,zm,ALPG3)∈Sf
粒子更新策略
FP-GPSO 在更新策略中引入了组内最优粒子 p b s e t G 1 , p b s e t G 2 , p b s e t G 3 \boldsymbol{p}{bset}^{G1}, \boldsymbol{p}{bset}^{G2}, \boldsymbol{p}_{bset}^{G3} pbsetG1,pbsetG2,pbsetG3,粒子速度更新:
v m ( t + 1 ) = ω ⋅ v m ( t ) + c 1 ⋅ r 1 ⋅ ( p m , b e s t ( t ) − p m ( t ) ) + c 2 ⋅ r 2 ⋅ ( p g b e s t ( t ) − p m ( t ) ) + c 3 ⋅ r 3 ⋅ ( p m , b e s t G ( t ) − p m ( t ) ) \begin{aligned} \boldsymbol{v}_m(t + 1) = & \, \omega \cdot \boldsymbol{v}m(t) + c_1 \cdot r_1 \cdot (\boldsymbol{p}{m,best}(t) - \boldsymbol{p}m(t)) \\ & + c_2 \cdot r_2 \cdot (\boldsymbol{p}{gbest}(t) - \boldsymbol{p}m(t)) \\ & + c_3 \cdot r_3 \cdot (\boldsymbol{p}{m,best}^G(t) - \boldsymbol{p}_m(t)) \end{aligned} vm(t+1)=ω⋅vm(t)+c1⋅r1⋅(pm,best(t)−pm(t))+c2⋅r2⋅(pgbest(t)−pm(t))+c3⋅r3⋅(pm,bestG(t)−pm(t))
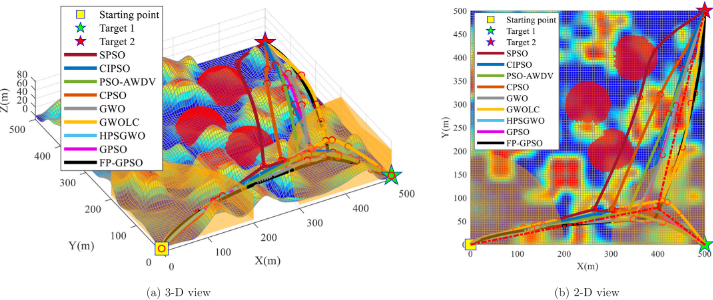
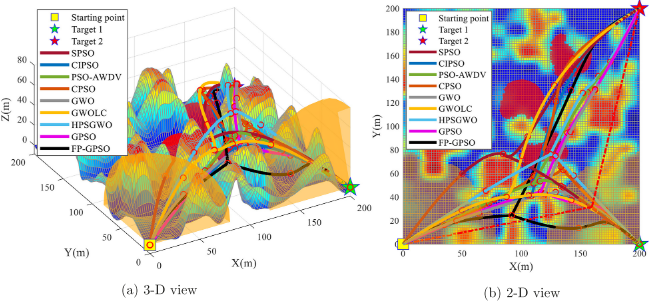
4.论文结果
5.参考文献
Li Y, Zhang L, Cai B, et al. Unified path planning for composite UAVs via Fermat point-based grouping particle swarm optimizationJ. Aerospace Science and Technology, 2024, 148: 109088.
6.算法辅导·应用定制·读者交流
xx