
■展会名称:
第22届中国(天津)国际装备制造业博览会
■展会日期
3月18日-21日
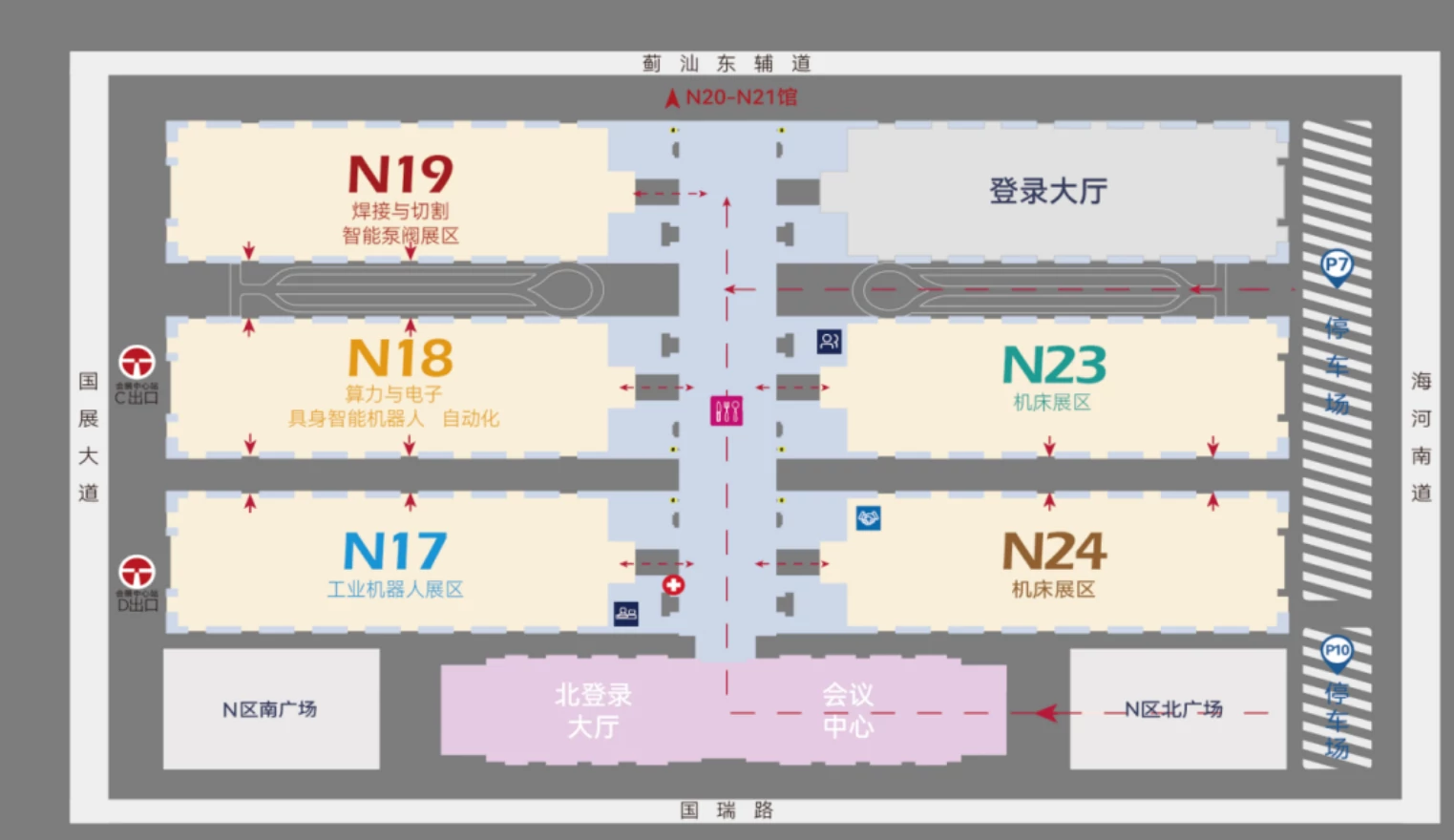
■展馆地点
中国·国家会展中心(天津)
■展位号
N18-D09

2026年3月18-21日,第22届中国(天津)国际装备制造业博览会 将于**中国·国家会展中心(天津)**盛大举行。本届展会立足中国工业制造市场,覆盖工业制造全产业链,致力于推动全球工业升级,打造一站式会展服务平台,打通产业发展供应链。
正运动技术专注于自主自研的运动控制产品,为客户提供自主可控的产品和解决方案,助力产线降本增效,提升效率与产能。
五大精彩看点,带你了解正运动技术产品
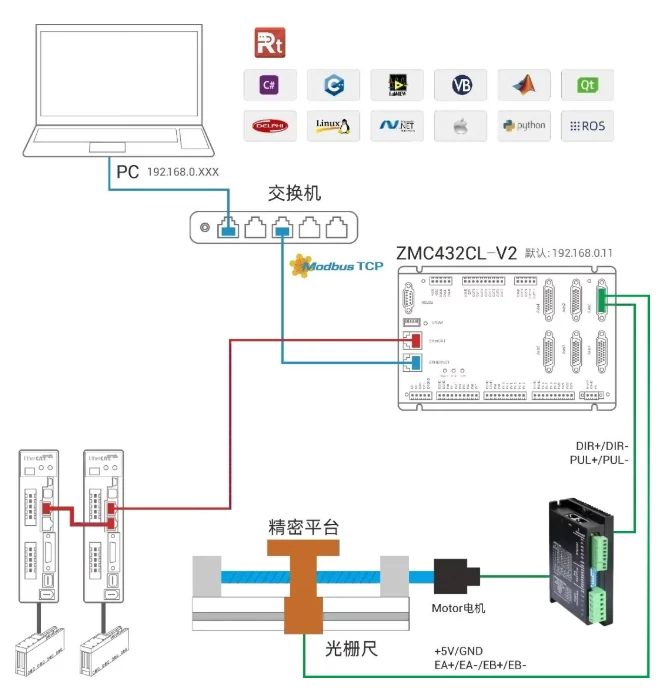
【看点一】 32轴脉冲全闭环EtherCAT运动控制器:ZMC432CL-V2
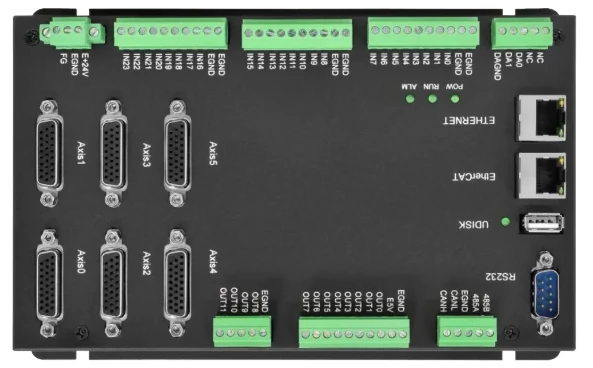
脉冲全闭环的32轴总线型运动控制器,EtherCAT最小运动周期可达250us。适用于高精密加工场景应用,助您实现高精度、高响应速度的运动控制!

● ZMC4系列高效的网口读写,PCIe/PCI系列卡可共享内存接口(共享内存的批量读写3-5us);
● 内置反向间隙补偿,双向螺距补偿,2D平面补偿等;
● 可以同时支持脉冲轴,EtherCAT轴运动与振镜联动的接口;
● 开放的PT/PVT接口客户可自定义加减速算法的二次编程;
● ZMC432CL-V2可支持步进电机的外置光栅尺全闭环解决方案。
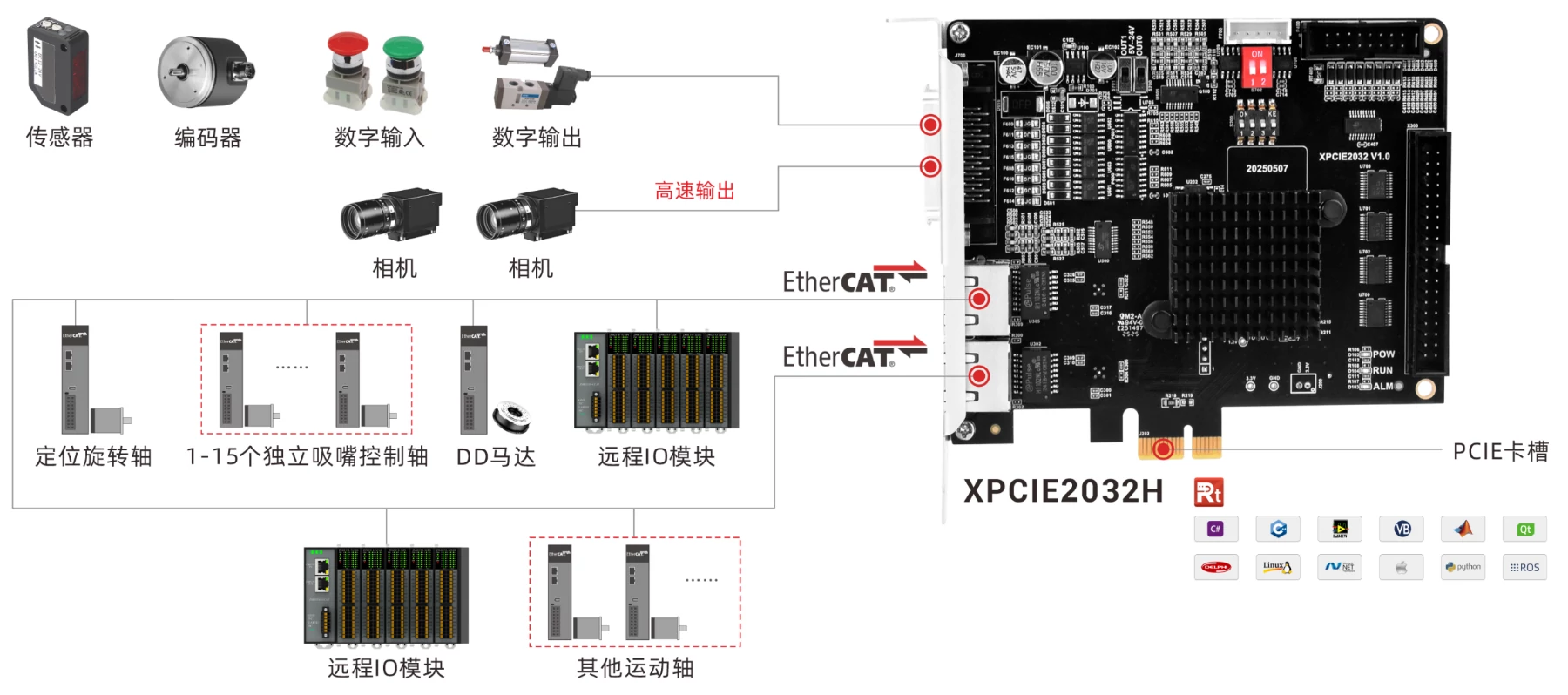
【看点二】 PCIe超实时2通道EtherCAT运动控制卡:XPCIE2032H
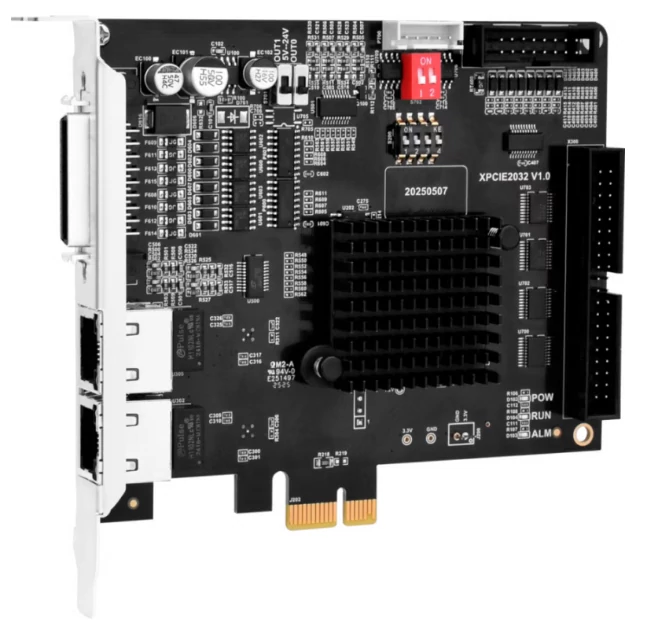
PCIe 2路高性能EtherCAT运动控制卡告别生产效率瓶颈!一卡集成2路独立EtherCAT接口,最快支持32轴125μs高速同步运动控制;最多支持254轴500μs多轴同步运动控制。大幅提升产线效率与柔性!搭载激光控制推挽接口,24V/5V激光电压灵活切换。
l 为智能装备提供高速高精运动控制解决方案,提升设备执行效率;
l 搭载激光控制推挽接口,可实现24V与5V准挽电压的切换(XPCIE2032HL型号支持);
l 需配合强实时运动控制内核MotionRT750一起使用;
l 提供多路高速IO输入输出,具备多种实时运动控制功能,例如:PWM、多维高速硬件位置比较输出PSO、速度自适应前瞻和I/O控制等功能。
搭载MotionTR750使用优势
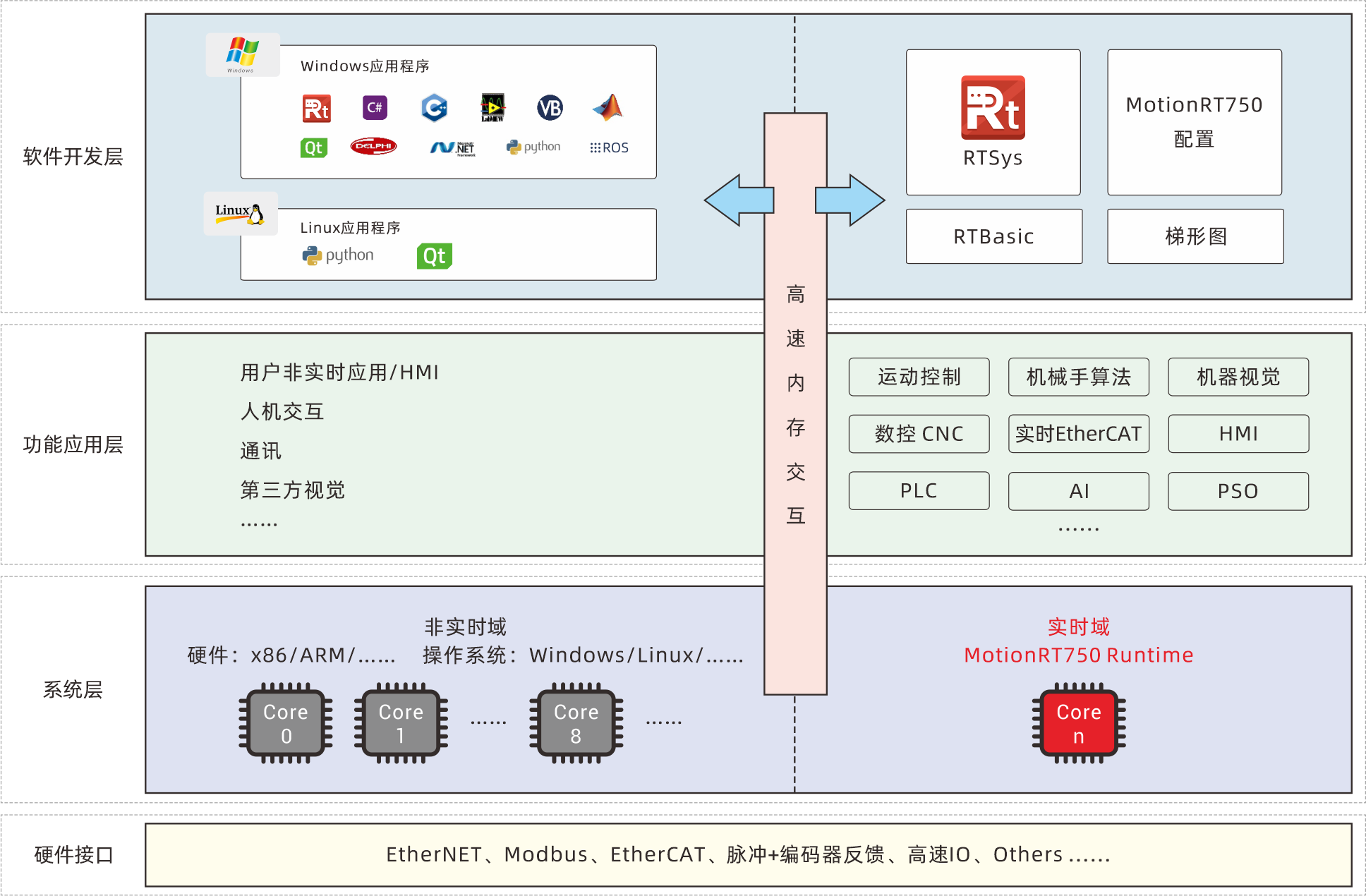
- 高速高精,指令交互速度快至us级,EtherCAT通讯周期快至125us(需要主机性能与实时性足够);相较于传统的PCI/PCIe、网口等通讯方式,速度可提升了10-100倍以上;

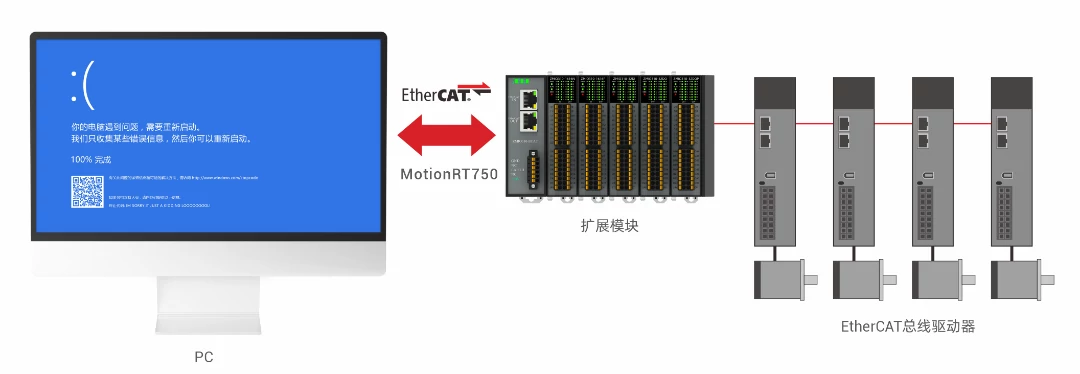
- 更安全机制,总线冗余可有效杜绝EtherCAT通讯故障停产导致的产能损失;
- 当Windows因病毒入侵等异常导致系统崩溃时,仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
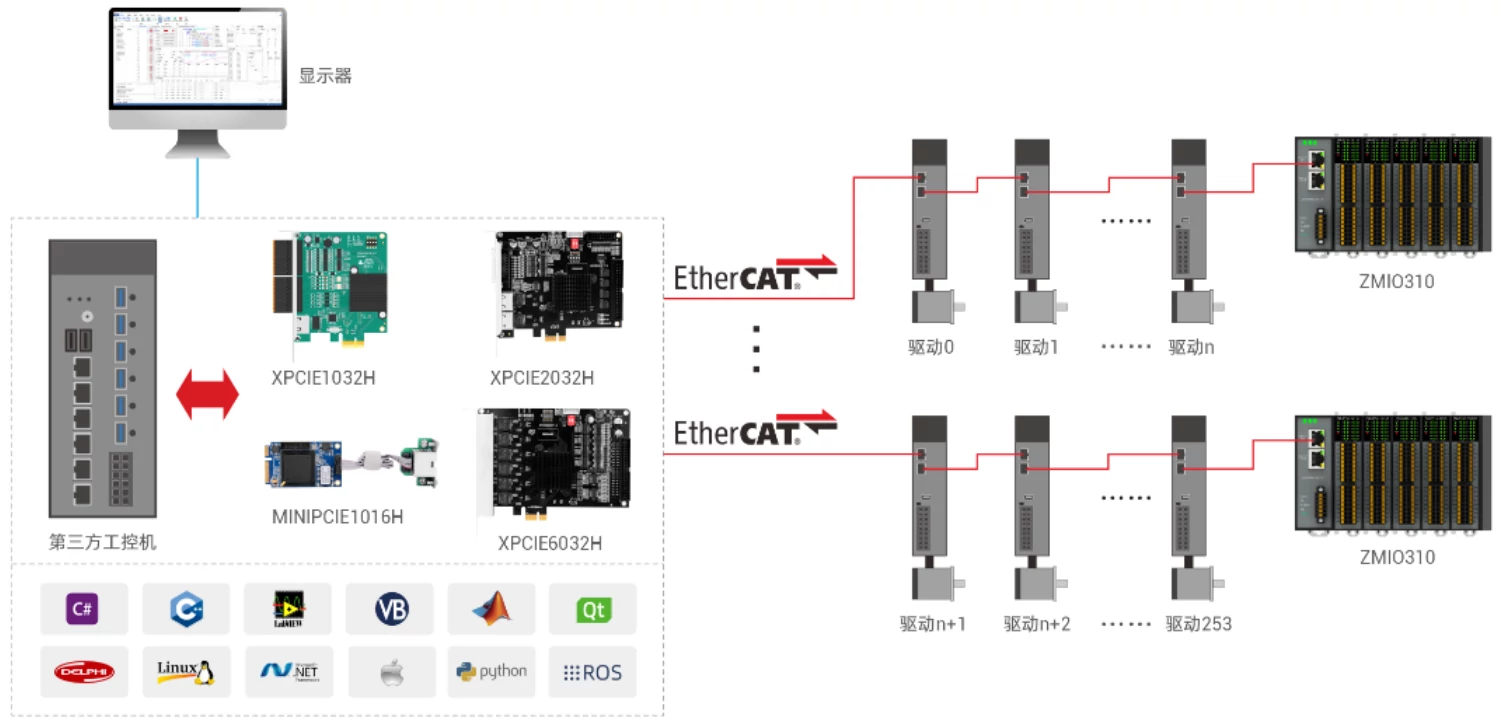
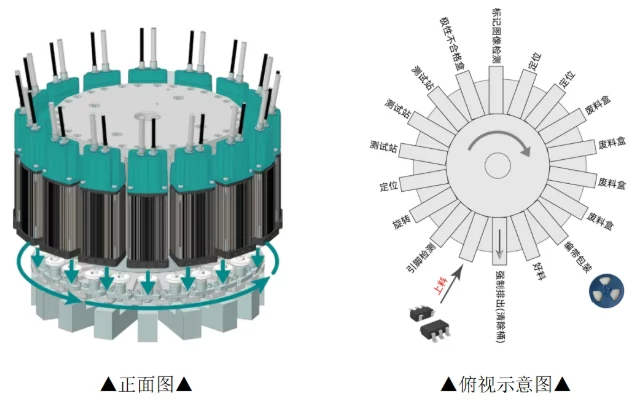
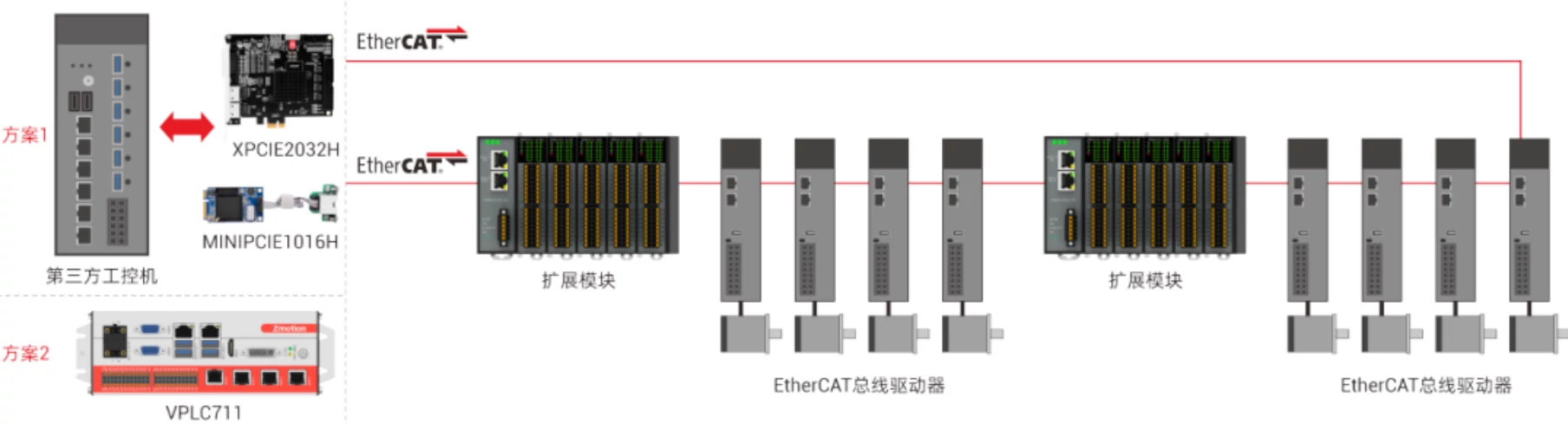
正运动转塔测试分选编带运动控制解决方案
**方案使用产品:**PCIe超实时2通道EtherCAT运动控制卡 XPCIE2032H
方案说明:
方案采用XPCIE2032H控制卡+工控机+第三方视觉的方案,可以集中处理伺服、气缸和外设信号的采集与控制。PCIE接口实现与测试机、打标机和图像检测系统的高速数据交换,简化调试并加快响应速度。
通过EtherCAT接口,实现高精度多轴同步控制;高速I/O接口,可实时处理传感器和视觉系统的反馈,快速触发转塔旋转、吸嘴拾取等动作,提升转塔测试分选编带设备的产能至50+Kpcs/小时,整体效率提升6%~15%。
方案核心优势一:双主站冗余
XPCIE2032H集成2路独立EtherCAT接口。2个EtherCAT主站各通道独立工作,多EtherCAT主站互不影响。双EtherCAT主站端口可任意设置为以下通道,且两个端口也设置为不同类型通道:
● 高速通道-EtherCAT通讯周期125us
● 常规通道-EtherCAT通讯周期250us-8ms
搭载环形冗余架构,双主站冗余确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。针对连续生产场景对设备7*24不间断运行的要求,实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。
方案核心优势二:视觉飞拍
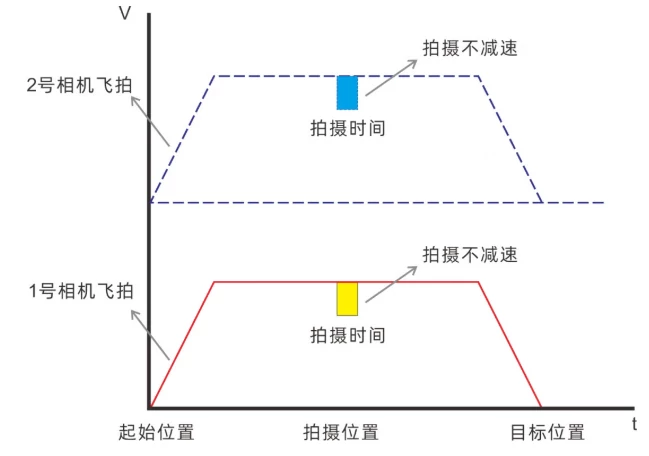
通过XPCIE2032H控制卡高速硬件位置比较输出,在视觉定位检测时可实现多工位同时视觉飞拍 ,相比传统的运行到拍照位停下来拍照,可缩短机台运行CT,提升设备的整体产能。
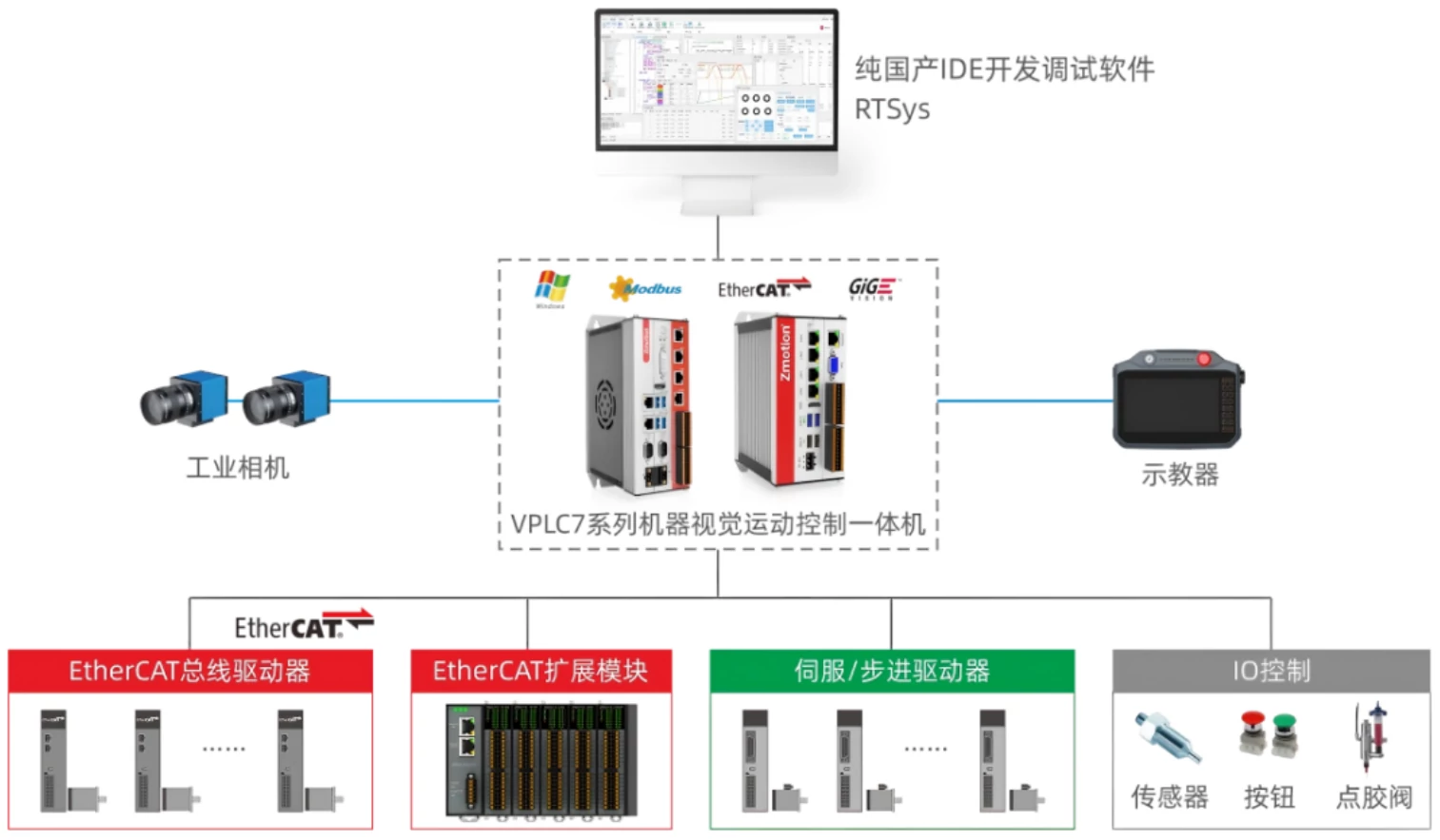
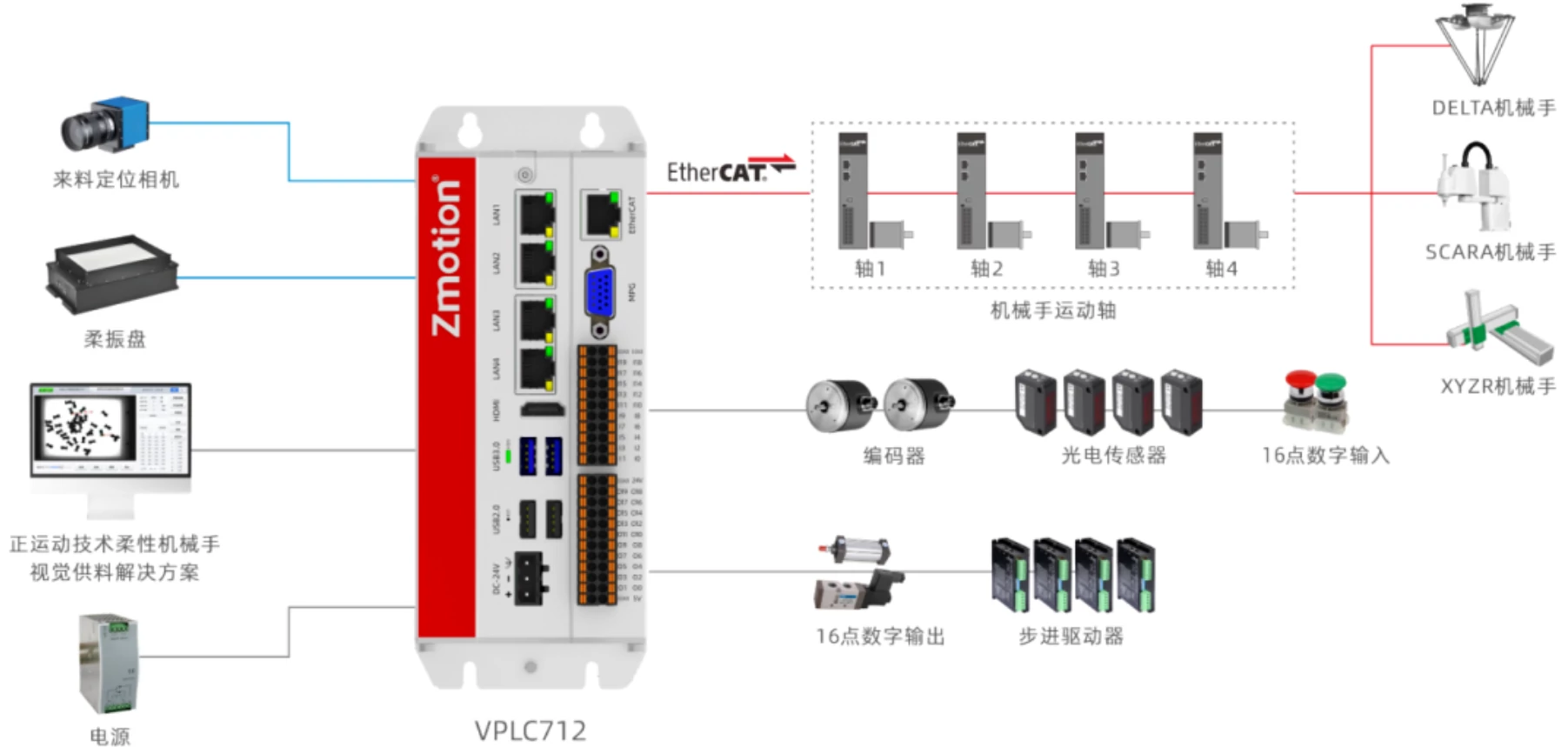
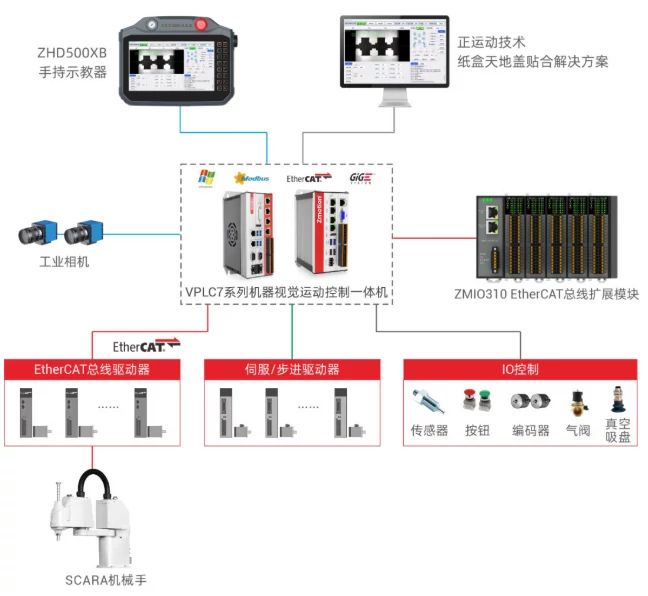
【看点三】 高集成机器视觉运动控制一体机:VPLC7系列

提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。面向多场景"视觉+运动控制"应用,可灵活配置与升级。相较传统封闭式"视觉+运控"硬件堆叠方案,可显著降低定制与迭代成本,缩短联调周期,强化数据交互实时性,降低项目落地与运维复杂度。
-
4-64轴运动控制(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us。
-
内置强实时运动控制内核MotionRT750,支持第三方视觉软件。
-
板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出。
-
支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作。
-
VPLC7系列适配于多种典型"视觉+运动控制"的工艺场景。
(1)磁驱多动子柔性输送方案
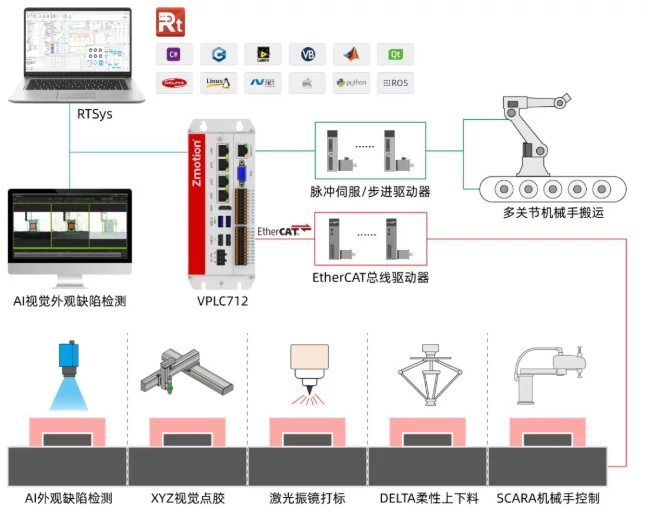
(2)柔振机械手视觉上下料解决方案
(3)正运动SCARA机械手纸盒天地盖视觉定位贴合解决方案
【看点四】 激光振镜运动控制卡:XPCIE2000SCAN
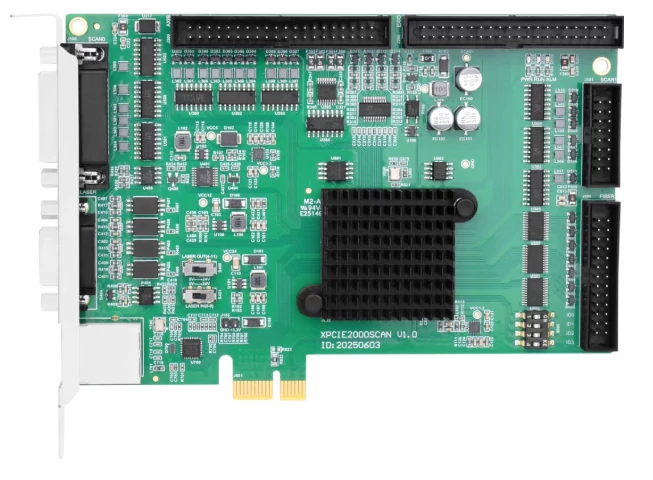
XPCIE2000SCAN激光振镜运动控制卡集成机器视觉、激光控制、振镜控制和总线轴/脉冲轴控制,专为工业视觉+激光+振镜+运动控制应用而设计。结合MotionRT750运动控制实时内核使用,可实现125us超高速控制周期的EtherCAT总线运动控制+激光振镜+机器视觉解决方案。
-
将机器视觉、激光控制、振镜控制与总线轴/脉冲轴控制功能集成于一体;
-
大幅降低系统复杂度,节省多套硬件成本,同时提升系统稳定性与响应速度;
-
可适配光纤、紫外、二氧化碳等多种不同功能的激光器;
-
可应用于金属或非金属的大幅面拼接打标及切割、普通振镜打标、焊接及切割、运动轴+振镜轴联动打标及切割、激光打孔成型等场合。
【看点五】 开放式激光振镜运动控制器:ZMC408SCAN-V22
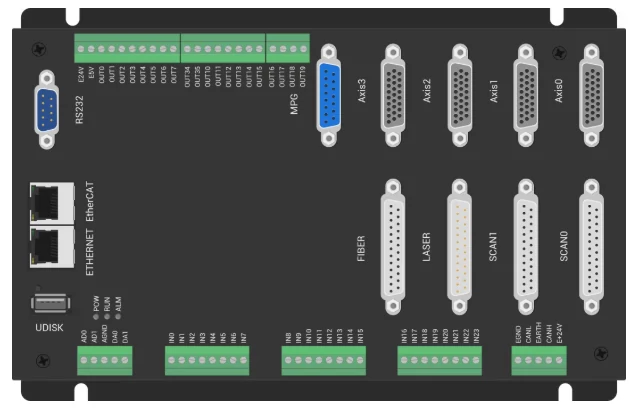
开放式激光振镜运动控制器,集成激光控制、振镜控制和总线轴/脉冲轴控制,助您实现高速高精的EtherCAT总线运动控制+激光振镜解决方案。
l 将激光控制、振镜与多轴运动控制功能集成于一体;
l 大幅降低系统复杂度,节省多套硬件成本,同时提升系统稳定性与响应速度;
l 支持高速PSO、PWM、速度前瞻等多个实时控制功能,有效保障加工轨迹平滑,提升加工质量与产能;
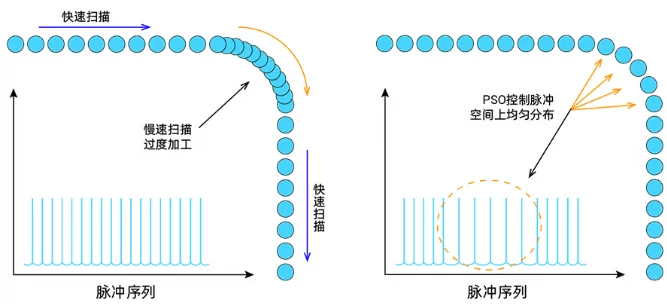
▲高精度PSO,等间距输出▲
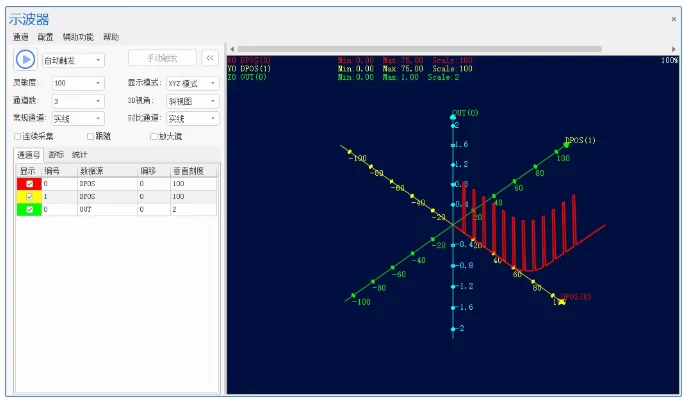
▲XYZ模式下示波器仿真▲
l 提供图形库、三轴/四轴联动库、速度前瞻库等一系列丰富库函数,助力用户高效开发专属激光系统,强化核心工艺控制能力;
l 依托自主研发的图形轨迹规划算法,实现振镜与运动平台的高精度协同,进一步提升加工效率与加工精度。
大幅面联动激光打标焊接运动控制解决方案
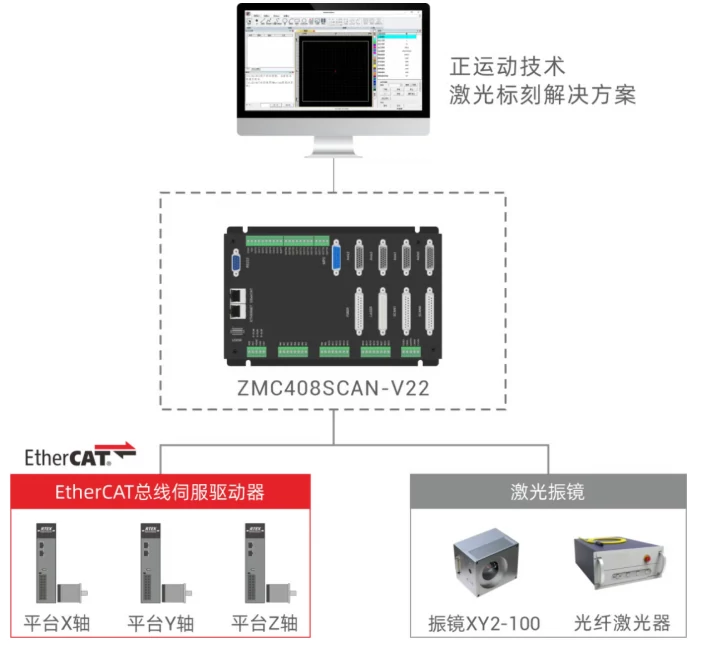
**方案使用产品:**开放式激光振镜运动控制器 ZMC408SCAN-V22
应用优势:
**● 多振镜协同控制:**支持多组振镜同步运行,适配不同尺寸工件,实现高效高精度打标与焊接。
**● 高速高精度打标:**激光+振镜+运动控制一体化,自动校正偏差,保障高速高质加工,减少废品。
**● 专用激光工艺API:**支持多种图形处理和工艺优化,简化生产流程,便于自定义开发,灵活适应需求。
**● 振镜与伺服轴联动:**精准激光束定位与动态跟踪,实现复杂形状高质量加工,运行更平稳。
**● 高精度PSO控制:**等间距输出,解决传统激光加工在倒角激光加工能量输出不恒定的问题,提高激光振镜打标、焊接质量。
诚邀莅临正运动展位**N1** **8** **-D09**,沉浸式体验从单一控制硬件到"产品+DEMO应用工艺包"的解决方案附加价值。与我们的技术团队零距离交流,共同探讨智能装备、高速高精运动控制等领域的前沿技术与合作机遇。