本文全面解析CAN报文ID与偏置的核心概念。CAN ID本质是内容标识而非地址,标准帧11位(2048个ID),扩展帧29位(5亿+ID)。偏置(Offset)定义信号在数据字节中的起始位位置,需结合字节序(Intel小端/Motorola大端)解析。文章详细介绍了ID分配策略、总线负载优化及DBC文件格式,并通过实战案例演示报文解析方法。关键要点包括:ID代表优先级而非目标地址、合理规划ID数量(建议<500个/网络)、总线负载控制在40%以下,以及统一使用DBC文件管理信号定义。最后针对常见问题提供了解决方案,为CAN网络设计提供实用指导。
一、CAN报文ID基础
1.1 ID的本质
CAN ID并不是"地址",而是"内容标识符"
| 传统理解(错误) | 正确理解 |
|---|---|
| ID = 目标地址 | ID = 报文内容的标识 |
| 点对点通信 | 广播式通信 |
| 需要路由 | 基于内容过滤 |
核心概念:
- ID代表 "这条报文是什么" ,而非 "发给谁"
- 所有节点都会收到,由接收者根据ID过滤
- ID同时决定 优先级(数值越小越优先)
1.2 标准帧与扩展帧ID对比
| 特性 | 标准帧(CAN 2.0A) | 扩展帧(CAN 2.0B) |
|---|---|---|
| ID长度 | 11位 | 29位 |
| ID范围 | 0x000 - 0x7FF | 0x00000000 - 0x1FFFFFFF |
| 可用ID数量 | 2048个 (2^11) | 536,870,912个 (2^29) |
| 帧开销 | 较小(47-111位) | 较大(67-135位) |
| 应用场景 | 传统汽车、工业 | J1939、CANopen、现代车辆 |
| 兼容性 | 所有CAN控制器 | 需支持CAN 2.0B |
二、CAN ID个数详解
2.1 理论ID数量
标准帧ID(11位)
总数:2^11 = 2048个
ID范围:
十六进制:0x000 - 0x7FF
十进制: 0 - 2047
二进制: 00000000000 - 11111111111特殊ID:
| ID值 | 十六进制 | 用途 | 说明 |
|---|---|---|---|
| 0 | 0x000 | 最高优先级 | 通常保留给紧急报文 |
| 2047 | 0x7FF | 最低优先级 | 通常用于非关键数据 |
扩展帧ID(29位)
总数:2^29 = 536,870,912个
ID范围:
十六进制:0x00000000 - 0x1FFFFFFF
十进制: 0 - 536,870,911扩展帧ID结构(J1939为例):
29位ID = 优先级(3) + 保留(1) + 数据页(1) + PDU格式(8) + PDU特定(8) + 源地址(8)
示例:0x0CF00400
二进制:00001100 11110000 00000100 00000000
───┬─── ──┬──┬── ──┬───── ──┬─────
│ │ │ │ │
优先级 R DP PF PS SA
3 0 0 0xF0 0x04 0x002.2 实际可用ID数量
虽然理论上有这么多ID,但实际应用中:
标准帧实际使用
典型汽车CAN网络:
动力总成CAN: 使用约 80-150个ID
底盘CAN: 使用约 50-100个ID
车身CAN: 使用约 100-200个ID
诊断CAN: 使用约 20-50个ID单个CAN网络建议:
- ✅ 推荐使用:< 200个ID
- ⚠️ 谨慎使用:200-500个ID(需仔细规划总线负载)
- ❌ 不推荐: > 500个ID(考虑拆分网络)
为什么不能用满2048个?
-
总线负载限制
假设1Mbps CAN,每帧平均100位: 理论最大:1,000,000 / 100 = 10,000 帧/秒 安全负载率:30-40% 实际可用:3,000-4,000 帧/秒 如果2048个ID都用,每个ID周期 > 0.5秒才安全 -
实时性要求
- 高优先级报文需要快速发送
- ID过多会增加仲裁延迟
- 关键信号需要10-20ms周期
-
节点处理能力
- ECU需要过滤和处理报文
- 过多ID增加CPU负载
2.3 ID数量规划示例
实际项目案例:某电动汽车动力CAN
| 功能域 | ID范围 | 数量 | 周期 | 优先级 |
|---|---|---|---|---|
| 电池管理 | 0x100-0x11F | 32 | 10-100ms | 高 |
| 电机控制 | 0x120-0x13F | 32 | 10-20ms | 高 |
| 车辆控制 | 0x200-0x24F | 80 | 20-100ms | 中 |
| 充电管理 | 0x300-0x31F | 32 | 100ms | 中 |
| 热管理 | 0x400-0x41F | 32 | 500ms | 低 |
| 诊断 | 0x7E0-0x7EF | 16 | 事件触发 | 低 |
| 总计 | - | 224 | - | - |
负载分析:
高频报文(10ms):64个 × 100帧/秒 = 6,400 帧/秒
中频报文(100ms):112个 × 10帧/秒 = 1,120 帧/秒
低频报文(500ms):32个 × 2帧/秒 = 64 帧/秒
总计:7,584 帧/秒
假设平均帧长80位:
总线利用率 = 7,584 × 80 / 1,000,000 = 60.7%
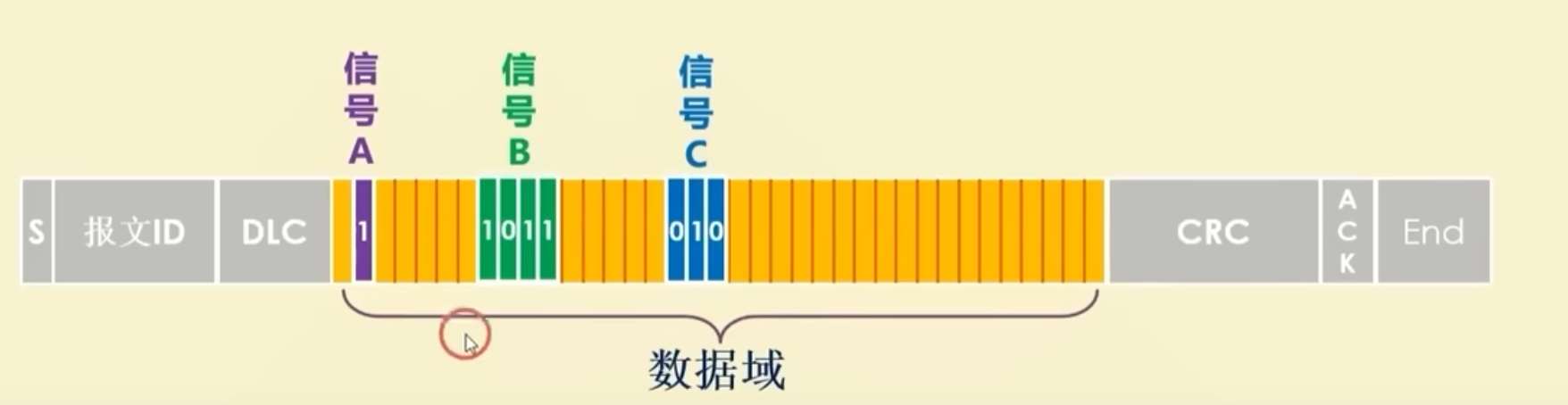
结论:接近饱和,需优化周期或升级到CAN FD三、CAN报文偏置(Offset)详解
3.1 什么是偏置?
偏置(Offset) 是指 信号在数据字节中的起始位位置。
完整的信号定义需要4个参数:
| 参数 | 英文 | 单位 | 说明 |
|---|---|---|---|
| 起始位(偏置) | Start Bit / Offset | bit | 信号从哪一位开始 |
| 长度 | Length | bit | 信号占用多少位 |
| 字节序 | Byte Order | - | 大端/小端 |
| 因子 | Factor | - | 原始值 → 物理值的乘数 |
3.2 位编号规则
CAN报文有两种位编号方式:
方式1:Intel格式(小端,LSB优先)
字节: Byte0 Byte1 Byte2 Byte3
位编号: 7 6 5 4 3 2 1 0 | 15 14 13 12 11 10 9 8 | 23 22...
示例数据: 0x12 0x34 0x56 0x78
二进制: 00010010 00110100 01010110 01111000
位编号: 7→0 15→8 23→16 31→24特点:
- 字节内:高位在左(MSB=7,LSB=0)
- 多字节:低字节在前(字节0 < 字节1)
- 常用于:Intel处理器、大部分汽车OEM
方式2:Motorola格式(大端,MSB优先)
字节: Byte0 Byte1 Byte2 Byte3
位编号: 7 6 5 4 3 2 1 0 | 15 14 13 12 11 10 9 8 | 23 22...
示例数据: 0x12 0x34 0x56 0x78
二进制: 00010010 00110100 01010110 01111000
位编号: 0→7 8→15 16→23 24→31特点:
- 字节内:高位在左(MSB=0,LSB=7)
- 多字节:高字节在前(字节0 > 字节1)
- 常用于:Motorola处理器、J1939协议
3.3 偏置计算示例
示例1:Intel格式(小端)
信号定义:
- 名称:发动机转速
- 起始位(偏置):0
- 长度:16位
- 字节序:Intel (小端)
- 因子:0.25
- 偏移量:0
报文数据:
Byte0: 0x1C (二进制: 00011100)
Byte1: 0x0C (二进制: 00001100)提取过程:
1. 定位起始位:
偏置=0,即从Byte0的第0位开始
2. 提取16位(小端):
Byte0 Byte1
0x1C 0x0C
小端序:低字节在前
原始值 = 0x0C1C (高字节0x0C在前)
3. 转换为十进制:
0x0C1C = 3100 (十进制)
4. 应用因子:
物理值 = 3100 × 0.25 = 775 RPM位图:
字节: Byte0(0x1C) Byte1(0x0C)
二进制: 0 0 0 1 1 1 0 0 0 0 0 0 1 1 0 0
位编号: 7 6 5 4 3 2 1 0 15 14 13 12 11 10 9 8
└───────────────────────────────┘
信号占用位
起始位=0,长度=16示例2:Motorola格式(大端)
信号定义:
- 名称:车速
- 起始位(偏置):16(Motorola编号)
- 长度:16位
- 字节序:Motorola (大端)
- 因子:0.01
- 偏移量:0
报文数据:
Byte0: 0xAA
Byte1: 0xBB
Byte2: 0x1F (二进制: 00011111)
Byte3: 0x40 (二进制: 01000000)提取过程:
1. 定位起始位(Motorola):
偏置=16,对应Byte2的第0位(MSB)
2. 提取16位(大端):
Byte2 Byte3
0x1F 0x40
大端序:高字节在前
原始值 = 0x1F40
3. 转换为十进制:
0x1F40 = 8000
4. 应用因子:
物理值 = 8000 × 0.01 = 80.00 km/h示例3:跨字节的复杂信号
信号定义:
- 名称:扭矩
- 起始位:12(Intel编号)
- 长度:12位
- 字节序:Intel
- 因子:0.1
- 偏移量:-500
报文数据:
Byte0: 0x00
Byte1: 0x34 (二进制: 00110100)
Byte2: 0x12 (二进制: 00010010)
Byte3: 0x00提取过程:
1. 定位起始位:
偏置=12,即从Byte1的第4位开始
2. 位图分析:
Byte1: Byte2:
0 0 1 1 0 1 0 0 0 0 0 1 0 0 1 0
15 14 13 12 11 10 9 8 23 22 21 20 19 18 17 16
└───────────────────────┘
信号占用12位
从bit12到bit23
3. 提取位值:
bit12-15: 0011 (来自Byte1高4位)
bit16-23: 00010010 (来自Byte2全部8位)
合并:0011 00010010 = 0x312
4. 转换:
原始值 = 0x312 = 786
物理值 = 786 × 0.1 + (-500) = -421.4 Nm3.4 DBC文件中的偏置表示
DBC(Database CAN) 是CAN网络的标准数据库文件格式。
格式:
SG_ 信号名 : 起始位|长度@字节序符号 (因子,偏移) [最小|最大] "单位" 接收节点字节序符号:
0= Motorola(大端,MSB优先)1= Intel(小端,LSB优先)
符号:
+= 无符号-= 有符号
示例:
BO_ 513 EngineData: 8 ECU
SG_ EngineSpeed : 0|16@1+ (0.25,0) [0|16383.75] "rpm" TCU,BCM
SG_ EngineTorque : 16|16@1- (0.1,-500) [-500|6053.5] "Nm" TCU
SG_ ThrottlePos : 32|8@1+ (0.4,0) [0|102] "%" TCU
解释:
报文ID=513(0x201),名称=EngineData,长度=8字节,发送者=ECU
信号1:EngineSpeed
- 起始位=0
- 长度=16位
- 字节序=1(Intel)
- 符号=+(无符号)
- 因子=0.25,偏移=0
- 范围=[0, 16383.75] rpm
- 接收者=TCU和BCM
信号2:EngineTorque
- 起始位=16
- 长度=16位
- 字节序=1(Intel)
- 符号=-(有符号)
- 因子=0.1,偏移=-500
- 范围=[-500, 6053.5] Nm3.5 常见偏置错误
| 错误类型 | 现象 | 原因 |
|---|---|---|
| 数值错乱 | 读取值完全错误 | 字节序搞反 |
| 数值偏小 | 读取值始终很小 | 位偏移计算错误 |
| 跳变 | 数值突然跳跃 | 跨字节边界处理错误 |
| 符号错误 | 正值变负值 | 有符号/无符号搞混 |
调试技巧:
# 验证工具(Python)
def extract_signal(data, start_bit, length, byte_order='intel'):
"""
data: 字节数组
start_bit: 起始位
length: 位长度
byte_order: 'intel' 或 'motorola'
"""
if byte_order == 'intel':
# 小端:从低位开始
start_byte = start_bit // 8
start_bit_in_byte = start_bit % 8
# 转换为位数组
bit_array = []
for byte in data:
for i in range(8):
bit_array.append((byte >> i) & 1)
# 提取信号
signal_bits = bit_array[start_bit:start_bit+length]
value = 0
for i, bit in enumerate(signal_bits):
value |= (bit << i)
return value
else: # motorola
# 大端:从高位开始
# (实现省略,类似但位顺序相反)
pass
# 使用示例
data = [0x1C, 0x0C, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]
speed_raw = extract_signal(data, 0, 16, 'intel')
speed_rpm = speed_raw * 0.25
print(f"Engine Speed: {speed_rpm} RPM") # 输出: 775 RPM四、CAN ID分配策略
4.1 ID分配原则
优先级金字塔:
优先级
↑
│
0x000 │ ◄── 紧急制动请求
0x001 │ 安全气囊触发
... │
0x100 │ ◄── ABS激活
0x101 │ ESP介入
... │
0x200 │ ◄── 发动机转速
0x201 │ 车速
0x300 │ 油门踏板
... │
0x600 │ ◄── 空调状态
0x700 │ 车窗位置
0x7DF │ ◄── 诊断请求
0x7FF │ 最低优先级
└─────────────────分配原则:
| 优先级 | ID范围 | 典型周期 | 应用 |
|---|---|---|---|
| 紧急 | 0x000-0x0FF | 事件触发 | 安全关键信号 |
| 高 | 0x100-0x1FF | 10-20ms | 控制回路 |
| 中 | 0x200-0x4FF | 20-100ms | 状态信息 |
| 低 | 0x500-0x6FF | 100-1000ms | 舒适功能 |
| 诊断 | 0x700-0x7FF | 事件触发 | OBD-II/UDS |
4.2 标准协议ID分配
OBD-II / UDS诊断ID
功能寻址:
0x7DF - 广播诊断请求(所有ECU)
物理寻址(请求):
0x7E0 - 发动机ECU
0x7E1 - 变速箱ECU
0x7E2 - ABS ECU
0x7E3 - 车身控制模块
...
0x7E7 - 保留
物理寻址(响应):
0x7E8 - 发动机ECU响应 (0x7E0 + 0x08)
0x7E9 - 变速箱ECU响应
...
0x7EF - 保留示例通信:
诊断仪 → 0x7E0: [02 01 0C 00 00 00 00 00] // 请求发动机转速
发动机 → 0x7E8: [04 41 0C 1F 40 00 00 00] // 响应: 2000 RPMCANopen协议ID
CANopen功能码(COB-ID):
0x000 - NMT (网络管理)
0x080 - SYNC (同步)
0x100 - EMCY (紧急)
0x180+节点ID - TPDO1 (发送PDO1)
0x200+节点ID - RPDO1 (接收PDO1)
0x280+节点ID - TPDO2
0x300+节点ID - RPDO2
0x380+节点ID - TPDO3
0x400+节点ID - RPDO3
0x480+节点ID - TPDO4
0x500+节点ID - RPDO4
0x580+节点ID - SDO响应
0x600+节点ID - SDO请求
0x700+节点ID - 心跳/节点保护示例(节点ID=5):
0x185 - 节点5的TPDO1
0x205 - 节点5的RPDO1
0x585 - 节点5的SDO响应
0x605 - 节点5的SDO请求
0x705 - 节点5的心跳J1939协议(29位扩展ID)
PGN (Parameter Group Number) 编码:
┌─────────┬────────┬──────────┬───────────┐
│ 优先级(3)│ R(1) DP(1) │ PF(8) │ PS(8) │
└─────────┴────────┴──────────┴───────────┘
常用PGN:
0x00FEE6 (65254) - 发动机温度
0x00FEF1 (65265) - 巡航控制/车速
0x00FEF2 (65266) - 燃油经济性
0x00F004 (61444) - 发动机基本信息4.3 自定义协议ID规划
某电动车项目实例:
电池管理系统(BMS):
0x100 - 电池组总压/总流
0x101 - SOC/SOH状态
0x102 - 单体电压1-4
0x103 - 单体电压5-8
...
0x110 - 温度传感器1-8
0x111 - 温度传感器9-16
0x120 - 绝缘电阻
0x121 - 故障代码
电机控制器(MCU):
0x200 - 电机转速/扭矩
0x201 - 电机温度
0x202 - 控制器温度
0x210 - 电机故障状态
整车控制器(VCU):
0x300 - 车速/档位
0x301 - 加速踏板
0x302 - 制动踏板
0x310 - 充电请求ID分配表格式:
| ID(Hex) | 名称 | 周期(ms) | 发送者 | 接收者 | DLC | 说明 |
|---|---|---|---|---|---|---|
| 0x100 | BMS_Voltage_Current | 10 | BMS | VCU,MCU | 8 | 总压总流 |
| 0x101 | BMS_SOC_SOH | 100 | BMS | VCU,Disp | 8 | 电量健康度 |
| 0x200 | MCU_Motor_Status | 10 | MCU | VCU,BMS | 8 | 电机状态 |
五、高级应用技巧
5.1 ID重用与多路复用
问题: ID不够用怎么办?
方案1:报文内多路复用(Multiplexing)
示例:一个ID传输多个信号组
ID: 0x300 "VehicleStatus"
Byte0: 复用标志 (MUX)
当MUX=0时:
Byte1-7: 车速、档位、转向灯...
当MUX=1时:
Byte1-7: 里程、油耗、续航...
当MUX=2时:
Byte1-7: 胎压1-4...DBC定义:
SG_ MUX M : 0|8@1+ (1,0) [0|255] "" XXX
SG_ VehicleSpeed m0 : 8|16@1+ (0.01,0) [0|655.35] "km/h" XXX
SG_ GearPosition m0 : 24|4@1+ (1,0) [0|15] "" XXX
SG_ Odometer m1 : 8|32@1+ (0.1,0) [0|429496729.5] "km" XXX
SG_ TirePressure1 m2 : 8|16@1+ (0.01,0) [0|6.55] "bar" XXX方案2:扩展帧
从标准帧升级到扩展帧
ID空间: 2048 → 5亿+5.2 动态ID分配
某些协议支持节点启动时动态获取ID:
CANopen节点ID分配流程:
1. 节点上电,默认ID=0x7F (未配置)
2. 发送身份请求:ID=0x000 (NMT)
3. 主站分配:ID=0x05
4. 节点确认,更新所有PDO的ID5.3 ID冲突检测
检测方法:
Python
# CAN网络监控脚本
import can
from collections import defaultdict
import time
bus = can.interface.Bus(channel='can0', bustype='socketcan')
id_senders = defaultdict(set)
last_data = {}
try:
while True:
msg = bus.recv(timeout=1.0)
if msg:
# 记录发送者(通过数据内容推断)
id_senders[msg.arbitration_id].add(tuple(msg.data))
# 检测冲突
if len(id_senders[msg.arbitration_id]) > 1:
print(f"⚠️ ID冲突!0x{msg.arbitration_id:03X} 被多个节点使用")
print(f" 不同数据: {id_senders[msg.arbitration_id]}")
# 检测ID抢占
if msg.arbitration_id in last_data:
if last_data[msg.arbitration_id] != msg.data:
time_diff = time.time() - last_time[msg.arbitration_id]
if time_diff < 0.001: # 1ms内数据变化
print(f"⚠️ 可能的ID抢占: 0x{msg.arbitration_id:03X}")
last_data[msg.arbitration_id] = msg.data
last_time[msg.arbitration_id] = time.time()
except KeyboardInterrupt:
pass5.4 ID过滤优化
硬件过滤器配置(减少CPU负载):
C
// 示例:STM32 CAN过滤器配置
// 只接收 0x200-0x2FF 范围的ID
CAN_FilterTypeDef filter;
filter.FilterIdHigh = 0x200 << 5; // ID起始
filter.FilterIdLow = 0;
filter.FilterMaskIdHigh = 0x700 << 5; // 掩码(0x700=111 0000 0000)
filter.FilterMaskIdLow = 0;
filter.FilterMode = CAN_FILTERMODE_IDMASK;
filter.FilterScale = CAN_FILTERSCALE_32BIT;
filter.FilterFIFOAssignment = CAN_RX_FIFO0;
filter.FilterActivation = ENABLE;
HAL_CAN_ConfigFilter(&hcan, &filter);
/* 工作原理:
* ID & Mask == Filter & Mask 时接收
*
* ID=0x201: 0010 0000 0001
* Mask: 0111 0000 0000 (0x700)
* Result: 0010 0000 0000 (0x200)
*
* Filter: 0010 0000 0000 (0x200)
* → 匹配!接收
*
* ID=0x301: 0011 0000 0001
* Mask: 0111 0000 0000
* Result: 0011 0000 0000 (0x300)
* → 不匹配!丢弃
*/六、总线负载与ID关系
6.1 ID对总线负载的影响
报文长度计算:
标准帧最小长度(0字节数据):
SOF(1) + ID(11) + RTR(1) + IDE(1) + r0(1) + DLC(4)
+ CRC(16) + ACK(2) + EOF(7) + IFS(3)
= 47位
标准帧最大长度(8字节数据):
47 + 64(数据) + 位填充(最多20%)
= 111 + 22 = 133位
扩展帧额外增加:
SRR(1) + IDE(1) + ID扩展(18) + r1(1)
= 21位实际负载示例:
网络:1Mbps CAN
报文:ID=0x200, DLC=8, 周期=10ms
单帧长度:约110位(含位填充)
帧速率:1000ms / 10ms = 100 帧/秒
占用带宽:100 × 110 = 11,000 bps
总线负载:11,000 / 1,000,000 = 1.1%多ID负载计算工具:
Python
def calculate_bus_load(messages, bitrate=1000000):
"""
messages: [(id, dlc, period_ms), ...]
返回总线负载百分比
"""
total_bits_per_sec = 0
for msg_id, dlc, period in messages:
# 计算单帧位数(含位填充,取1.2倍)
frame_bits = (47 + dlc * 8) * 1.2
# 计算每秒帧数
frames_per_sec = 1000 / period
# 累加
total_bits_per_sec += frame_bits * frames_per_sec
load = (total_bits_per_sec / bitrate) * 100
return load
# 使用示例
messages = [
(0x100, 8, 10), # BMS电压电流,10ms
(0x101, 8, 100), # BMS SOC, 100ms
(0x200, 8, 10), # 电机状态,10ms
(0x300, 8, 20), # 车速,20ms
]
load = calculate_bus_load(messages, 500000) # 500Kbps CAN
print(f"总线负载: {load:.2f}%")6.2 负载优化策略
| 策略 | 效果 | 适用场景 |
|---|---|---|
| 减少DLC | 降低20-50% | 信号少的报文 |
| 降低频率 | 线性降低 | 非关键信号 |
| 事件触发 | 降低50-90% | 状态变化慢的信号 |
| 报文合并 | 减少帧开销 | 相同周期的信号 |
| 升级CAN FD | 提升5-8倍 | 高负载网络 |
七、实战案例
案例1:诊断报文解析
接收到的原始数据:
ID: 0x7E8
Data: 06 41 05 5A 49 0D 64 00
任务:解析OBD-II响应解析步骤:
Byte0: 06 = 后续有效字节数
Byte1: 41 = 服务01的肯定响应 (0x40 + 0x01)
Byte2: 05 = PID 0x05(冷却液温度)
Byte3: 5A = 数据值
计算:
冷却液温度 = 0x5A - 40 = 90 - 40 = 50°C
继续解析:
Byte4: 49 = PID?(实际是下一个请求的响应开始)
等等...
正确理解:这是多帧响应或格式错误案例2:DBC文件生成
需求: 为自定义协议生成DBC文件
VERSION ""
NS_ :
NS_DESC_
CM_
BA_DEF_
BA_
VAL_
CAT_DEF_
CAT_
FILTER
BA_DEF_DEF_
EV_DATA_
ENVVAR_DATA_
SGTYPE_
SGTYPE_VAL_
BA_DEF_SGTYPE_
BA_SGTYPE_
SIG_TYPE_REF_
VAL_TABLE_
SIG_GROUP_
SIG_VALTYPE_
SIGTYPE_VALTYPE_
BO_TX_BU_
CAT_
BA_DEF_REL_
BA_REL_
BA_SGTYPE_REL_
SG_MUL_VAL_
BS_:
BU_: BMS VCU MCU Display
BO_ 256 BMS_Voltage_Current: 8 BMS
SG_ Pack_Voltage : 0|16@1+ (0.1,0) [0|6553.5] "V" VCU,MCU,Display
SG_ Pack_Current : 16|16@1- (0.1,-1000) [-1000|5553.5] "A" VCU,MCU
SG_ Max_Cell_Voltage : 32|16@1+ (0.001,0) [0|65.535] "V" VCU
SG_ Min_Cell_Voltage : 48|16@1+ (0.001,0) [0|65.535] "V" VCU
BO_ 257 BMS_SOC_SOH: 8 BMS
SG_ SOC : 0|8@1+ (0.5,0) [0|100] "%" VCU,Display
SG_ SOH : 8|8@1+ (0.5,0) [0|100] "%" VCU,Display
SG_ Charge_Status : 16|2@1+ (1,0) [0|3] "" VCU
SG_ Fault_Level : 18|2@1+ (1,0) [0|3] "" VCU,Display
BO_ 512 MCU_Motor_Status: 8 MCU
SG_ Motor_Speed : 0|16@1- (1,-10000) [-10000|55535] "rpm" VCU,Display
SG_ Motor_Torque : 16|16@1- (0.1,-500) [-500|6053.5] "Nm" VCU
SG_ Motor_Temp : 32|8@1+ (1,-40) [-40|215] "°C" VCU
SG_ Controller_Temp : 40|8@1+ (1,-40) [-40|215] "°C" VCU
CM_ SG_ 257 Charge_Status "0=未充电 1=充电中 2=充电完成 3=故障";
CM_ SG_ 257 Fault_Level "0=正常 1=警告 2=限功率 3=禁止行驶";
VAL_ 257 Charge_Status 0 "Not_Charging" 1 "Charging" 2 "Complete" 3 "Fault";
VAL_ 257 Fault_Level 0 "Normal" 1 "Warning" 2 "Derate" 3 "Inhibit";
BA_DEF_ "BusType" STRING;
BA_DEF_ BO_ "GenMsgCycleTime" INT 0 10000;
BA_DEF_ SG_ "GenSigStartValue" FLOAT 0 100000000000;
BA_DEF_DEF_ "BusType" "CAN";
BA_DEF_DEF_ "GenMsgCycleTime" 0;
BA_DEF_DEF_ "GenSigStartValue" 0;
BA_ "GenMsgCycleTime" BO_ 256 10;
BA_ "GenMsgCycleTime" BO_ 257 100;
BA_ "GenMsgCycleTime" BO_ 512 10;案例3:Python完整解析工具
Python
import can
import cantools
# 加载DBC文件
db = cantools.database.load_file('my_protocol.dbc')
# 连接CAN总线
bus = can.interface.Bus(channel='can0', bustype='socketcan')
def decode_and_print(message):
"""解码并打印CAN报文"""
try:
# 查找报文定义
msg_def = db.get_message_by_frame_id(message.arbitration_id)
# 解码
decoded = msg_def.decode(message.data)
print(f"\n{'='*60}")
print(f"报文: {msg_def.name} (ID: 0x{message.arbitration_id:03X})")
print(f"{'='*60}")
for signal_name, value in decoded.items():
signal = msg_def.get_signal_by_name(signal_name)
print(f" {signal_name:20s} = {value:10.2f} {signal.unit}")
print(f"{'='*60}\n")
except KeyError:
print(f"未知报文 ID: 0x{message.arbitration_id:03X}")
# 主循环
try:
print("开始监听CAN总线...")
while True:
message = bus.recv()
if message:
decode_and_print(message)
except KeyboardInterrupt:
print("\n停止监听")
bus.shutdown()八、常见问题FAQ
Q1:为什么我的ID=0x800发不出去?
A: 0x800 = 2048,超出标准帧11位范围(0-2047)。需要使用扩展帧或改用0x7FF以内的ID。
Q2:如何选择Intel还是Motorola字节序?
A:
- Intel(小端):现代汽车OEM的主流,工具支持好
- Motorola(大端):J1939等商用车协议,传统设备
- 建议:新项目统一用Intel
Q3:偏置和字节序有什么关系?
A: 偏置定义信号起始位,字节序决定多字节信号的组合方式:
Intel: 低字节数据在前(数值低位在低地址)
Motorola: 高字节数据在前(数值高位在低地址)Q4:DLC可以小于实际数据字节数吗?
A:
- ❌ 不可以!DLC必须≥实际数据字节数
- ⚠️ DLC>实际字节数是允许的(未使用字节通常填0xFF或0x00)
Q5:ID用完了怎么办?
A:
- 使用扩展帧(29位ID)
- 报文内多路复用(MUX)
- 拆分CAN网络
- 升级到CAN FD
总结
CAN ID核心要点:
✅ ID本质 :内容标识 + 优先级,不是地址
✅ 标准帧 :11位,2048个ID
✅ 扩展帧 :29位,5亿+个ID
✅ 偏置 :信号在数据字节中的起始位位置
✅ 字节序:Intel(小端)vs Motorola(大端)
设计要点:
- 安全关键 → 低ID(高优先级)
- ID数量 < 500个/网络(建议)
- 总线负载 < 40%(安全值)
- 统一字节序(推荐Intel)
- 使用DBC文件管理