研究课题:
基于标准A星算法的无人机路径规划
关键词:
无人机; 路径规划; A星算法
改进方向:
无
课题说明:
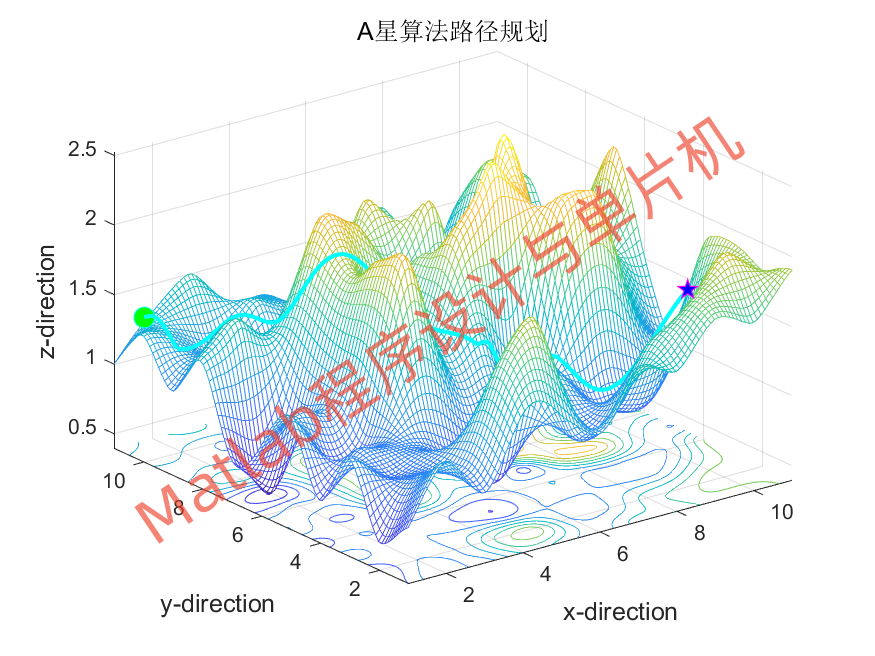
研究标准A star算法的基本原理和三维地图路径规划求解方法,结合参考文献研究如何使用标准A star算法求解三维地图下的无人机路径规划,其中包括:如何创建3维地图;如何创建开放和关闭列表;如何设定结束条件以及如何选择A星算法的8个方向。为了更好地显示出A星算法在三维地图求解最优路径的效果,使用Matlab软件编程来实现三维地图下A star算法优化的无人机路径规划与避障,并且输出三维路径图和路径长度等信息
算法流程:
基于对A星算法基本原理和无人机路径规划模型的基本研究,标准A星算法求解无人机路径规划包括以下步骤:
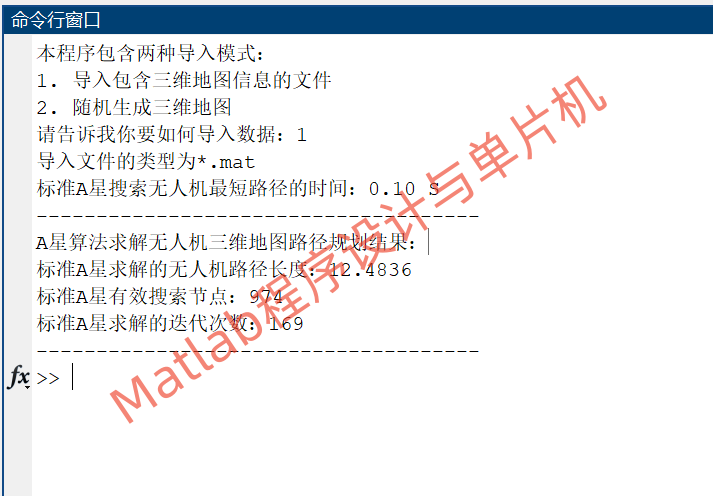
1)导入三维地图并对地图进行插值和网格化进行细分;
2)设定无人机起飞的起点与终点,定义无人机可行的飞行方向;
3)计算当前点的实际代价和预估代价函数值;
4)通过OPEN/CLOSE表的来计算各个邻域的f(n)/g(n)/h(n)值并更新表中数值;
5)回溯寻找路径;
6)计算路径长度并绘制路径仿真图。
待改进方向:
1)自适应权重系数优化启发函数
2)搜索邻域优化
3)OPEN表优化
4)平滑度优化
Matlab仿真结果: