

CRC8校验与异或校验的优劣 🔥
异或校验是「轻量简易的入门校验」;CRC 校验是「工业级高可靠性的主流校验」
异或校验(简单异或和 / 校验和)
-
符号 :"^"(数字6那里)
-
实现原理:将16进制转为8为二进制后,对应位置按照相同 = 0,不同 = 1的规则,异或的结果再转为16进制
0 ^ 0 = 0
0 ^ 1 = 1
1 ^ 0 = 1
1 ^ 1 = 0 -
实现流程 :例
0x01 ^ 0x02 = 0x030x01 → 0000 0001
0x02 → 0000 00100000 0001^ 0000 0010
0000 00110000 0011 → 0x03
-
代码实现:
c
uint8_t xor_check(uint8_t *data, uint8_t len)
{
uint8_t check = 0; // 初始值 = 0
for(int i=0; i<len; i++)
{
check ^= data[i]; // 逐个异或
}
return check;
}- 致命缺点:漏检率极高,完全不适合工业场景
在串口通信中,通信会受到电机电磁干扰、线材信号衰减、外界环境杂波 等影响,而异或校验在这些场景下几乎等于没校验
示例:
0x12,0x34,异或和=0x26,若传输中变成0x13,0x35(两个字节各翻 1 位),异或和=0x26,异或校验认为数据无误,实际数据已错0x01,0x02变成0x02,0x01,字节错位,异或和不变,异或校验无法检测;
CRC 校验(循环冗余校验,以 CRC8 为例)
-
查表法 :多项式
(0x4d): x 6 + x 3 + x 2 + 1 x^6 + x^3 + x^2 + 1 x6+x3+x2+1x⁶ + x³ + x² + 1
位7 位6 位5 位4 位3 位2 位1 位0
0 1 0 0 1 1 0 1= 0100 1101
= 0x4D -
CRC8数据表
c
static const uint8_t CRC_TABLE[256] = {
0x00, 0x4d, 0x9a, 0xd7, 0x79, 0x34, 0xe3,
0xae, 0xf2, 0xbf, 0x68, 0x25, 0x8b, 0xc6, 0x11, 0x5c, 0xa9, 0xe4, 0x33,
0x7e, 0xd0, 0x9d, 0x4a, 0x07, 0x5b, 0x16, 0xc1, 0x8c, 0x22, 0x6f, 0xb8,
0xf5, 0x1f, 0x52, 0x85, 0xc8, 0x66, 0x2b, 0xfc, 0xb1, 0xed, 0xa0, 0x77,
0x3a, 0x94, 0xd9, 0x0e, 0x43, 0xb6, 0xfb, 0x2c, 0x61, 0xcf, 0x82, 0x55,
0x18, 0x44, 0x09, 0xde, 0x93, 0x3d, 0x70, 0xa7, 0xea, 0x3e, 0x73, 0xa4,
0xe9, 0x47, 0x0a, 0xdd, 0x90, 0xcc, 0x81, 0x56, 0x1b, 0xb5, 0xf8, 0x2f,
0x62, 0x97, 0xda, 0x0d, 0x40, 0xee, 0xa3, 0x74, 0x39, 0x65, 0x28, 0xff,
0xb2, 0x1c, 0x51, 0x86, 0xcb, 0x21, 0x6c, 0xbb, 0xf6, 0x58, 0x15, 0xc2,
0x8f, 0xd3, 0x9e, 0x49, 0x04, 0xaa, 0xe7, 0x30, 0x7d, 0x88, 0xc5, 0x12,
0x5f, 0xf1, 0xbc, 0x6b, 0x26, 0x7a, 0x37, 0xe0, 0xad, 0x03, 0x4e, 0x99,
0xd4, 0x7c, 0x31, 0xe6, 0xab, 0x05, 0x48, 0x9f, 0xd2, 0x8e, 0xc3, 0x14,
0x59, 0xf7, 0xba, 0x6d, 0x20, 0xd5, 0x98, 0x4f, 0x02, 0xac, 0xe1, 0x36,
0x7b, 0x27, 0x6a, 0xbd, 0xf0, 0x5e, 0x13, 0xc4, 0x89, 0x63, 0x2e, 0xf9,
0xb4, 0x1a, 0x57, 0x80, 0xcd, 0x91, 0xdc, 0x0b, 0x46, 0xe8, 0xa5, 0x72,
0x3f, 0xca, 0x87, 0x50, 0x1d, 0xb3, 0xfe, 0x29, 0x64, 0x38, 0x75, 0xa2,
0xef, 0x41, 0x0c, 0xdb, 0x96, 0x42, 0x0f, 0xd8, 0x95, 0x3b, 0x76, 0xa1,
0xec, 0xb0, 0xfd, 0x2a, 0x67, 0xc9, 0x84, 0x53, 0x1e, 0xeb, 0xa6, 0x71,
0x3c, 0x92, 0xdf, 0x08, 0x45, 0x19, 0x54, 0x83, 0xce, 0x60, 0x2d, 0xfa,
0xb7, 0x5d, 0x10, 0xc7, 0x8a, 0x24, 0x69, 0xbe, 0xf3, 0xaf, 0xe2, 0x35,
0x78, 0xd6, 0x9b, 0x4c, 0x01, 0xf4, 0xb9, 0x6e, 0x23, 0x8d, 0xc0, 0x17,
0x5a, 0x06, 0x4b, 0x9c, 0xd1, 0x7f, 0x32, 0xe5, 0xa8
};为了提高计算 CRC 校验值的速度,通常会预先计算出所有可能的 256 个字节对应的校验结果并存入数组,这样在运行时只需通过"查表"即可完成计算,而不需要逐位进行复杂的异或(XOR)和移位操作。
- 数据生成方式 (模 2 除法 :看的是最高位(最高次幂)是否对齐1。它不关心数值大小,只关心"位"。)
c
#include <stdio.h>
void generate_crc8_table() {
unsigned char poly = 0x4d; // 生成多项式
unsigned char table[256];
for (int i = 0; i < 256; i++) {
unsigned char crc = (unsigned char)i;
for (int j = 0; j < 8; j++) {
if (crc & 0x80) { //检查最高位是否为 1 (相当于除法的商为 1)意味着当前的数值已经达到了生成多项式的"量级",商为 1。这时必须执行"减法"(即异或运算 ^ 0x4d)
crc = (crc << 1) ^ poly;//移位并进行异或 (相当于减去除数)
} else {
crc <<= 1;//高位为 0,只需移位 (相当于商为 0)
}
}
table[i] = crc;
}
}- 雷达数据实际应用
c
/**
* @brief 雷达数据CRC校验
* @param protocol_buf 串口发来的数据包
* @param crc_len 数据包长度
* @return CRC8校验值
*/
static uint8_t LD14P_Calculate_CRC8(uint8_t* protocol_buf, uint8_t crc_len)
{
int i;
uint8_t crc = 0x00;
for (i = 0; i < crc_len; i++)
crc = CRC_TABLE[(crc ^ protocol_buf[i]) & 0xFF]; //查表法,省去按位运算,提高性能,& 0xFF 是为了确保结果严格落在 0 到 255 的范围内。
return crc;
}查表法的 CRC8 表仅256 字节,CRC16 表是 65536 字节,对雷达的低配 MCU 来说,更节省内存。
激光雷达数据包格式

-
起始符:长度1 Byte,值固定为0x54,表示数据包的开始;
-
VerLen(固定) :长度1 Byte,高三位表示帧类型,目前固定为1,低五位表示一个包的测量点数,目前固定为12 ,故该字节值固定为0x2C;
-
雷达转速:长度2 Byte,单位为度每秒;
-
起始角度: 长度2 Byte,单位为0.01度;
-
数据 :一个测量数据长度为3个字节,包括2字节的距离和1字节的强度,会有12个测量点
-
结束角度:长度2 Byte,单位为0.01度;
-
时间戳 :长度2 Byte,单位为ms,最大为30000,到达30000会重新
计数;
-
CRC校验:前面所有数据的校验和
数据包结构:
固定长度 = 1(头)+1(VerLen)+2(转速)+2(起始角)+12*3(点数据)+2(结束角)+2(时间戳)+1(CRC) = 47 字节
激光雷达接收数据状态机
- 初始状态0:仅找LD14P唯一帧头0x54
- 核心状态1:接收点云包的所有剩余数据(1~46字节)
c
/**
* @brief 状态机读取串口数据
* @param pkg 串口发来的单字节
* @return 无
*/
void LD14P_Data_Receive(uint8_t rx_data)
{
static uint8_t rx_flag = 0; // 0:初始状态(找帧头); 1:收点云包数据
static uint8_t rx_buf_len = 0; // 数据包总长度
static uint8_t rx_buf_index = 0; // 当前接收字节索引
switch (rx_flag)
{
case 0: // 初始状态:仅找LD14P唯一帧头0x54
{
if (rx_data == LD14P_HEAD) // 匹配LD14P帧头
{
rx_flag = 1; // 直接进入状态1:收点云包数据
rx_protocol_buf[0] = LD14P_HEAD; // 帧头存入缓冲区0字节
rx_buf_index = 1; // 下一个字节从索引1开始
rx_buf_len = LD14P_PACKAGE_LEN; // LD14P固定包长47字节
}
break;
}
case 1: // 核心状态:接收点云包的所有剩余数据(1~46字节)
{
rx_protocol_buf[rx_buf_index] = rx_data; // 存入当前字节
rx_buf_index++; // 索引自增,存入雷达核心数据
// 激光雷达数据接收完成(一帧)(索引达到固定包长47)
if (rx_buf_index >= rx_buf_len)
{
// 重置状态机,准备收下一包
rx_flag = 0;
rx_buf_len = 0;
rx_buf_index = 0;
// 解析点云包→拼接360°数据→置新包标志
if (LD14P_Parse_Package(rx_protocol_buf, &ld14p_pkg) == ESP_OK)
{
LD14P_Output_Data(&ld14p_pkg, &ld14p_data);
new_package = 1; // 通知上层有新数据
}
memset(rx_protocol_buf, 0, sizeof(rx_protocol_buf)); // 清空缓冲区
}
// 缓冲区溢出保护(防止内存越界)
if (rx_buf_index >= LD14P_BUF_MAX)
{
rx_flag = 0;
rx_buf_len = 0;
rx_buf_index = 0;
memset(rx_protocol_buf, 0, sizeof(rx_protocol_buf));
}
break;
}
default: // 异常状态:重置所有变量
rx_flag = 0;
rx_buf_len = 0;
rx_buf_index = 0;
break;
}
}解析激光雷达点云数据包🌟
LD14P激光雷达数据手册: LDROBOT_LD14P DataSheet_CN_v0.4_Wlmrp6QT.pdf
LD14P激光雷达开发手册: LDROBOT_LD14_Development_Manual_CN_v1_20220530170742.0.pdf
通信接口
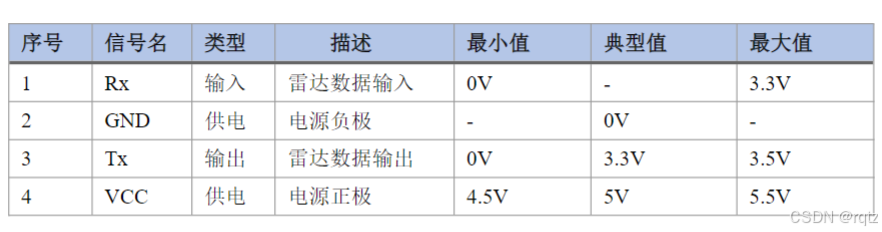
ESPIDF配置串口通信
-
芯片:ESP32S3
-
串口号:UART_NUM_1
-
RX :GPIO17; TX:GPIO18
-
波特率:230400
串口初始化
c
const uart_config_t uart_config = {
.baud_rate = 230400,//设置串口波特率为 230400,适配LD14P雷达
.data_bits = UART_DATA_8_BITS,//数据位配置为 8 位
.parity = UART_PARITY_DISABLE,//禁用奇偶校验
.stop_bits = UART_STOP_BITS_1,//停止位配置为 1 位
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,//禁用硬件流控(RTS/CTS)
.source_clk = UART_SCLK_DEFAULT//使用默认时钟源
};
//安装 UART 驱动(参数):指定操作的串口号,UART 硬件接收缓冲区大小(字节),UART 硬件发送缓冲区大小(字节),UART 事件队列长度,事件队列句柄,内存分配标志
uart_driver_install(UART_NUM_1, RX0_BUF_SIZE * 2, 0, 0, NULL, 0);
//配置 UART 参数(参数):目标串口号,串口配置结构体的指针
uart_param_config(UART_NUM_1, &uart_config);
//绑定 UART 引脚(参数):目标串口号,TX 引脚编号,RX 引脚编号,RTS 引脚,CTS 引脚:
uart_set_pin(UART_NUM_1, UART0_GPIO_TXD, UART0_GPIO_RXD, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
//初始化环形缓冲区
RingBuffer_Init(&uart1_ringbuf, 1024);
//FreeRTOS 接口,创建一个独立的任务来持续读取 UART0 硬件数据;(参数):任务函数入口,任务名称,任务栈大小,任务参数,任务优先级,任务句柄
xTaskCreate(Uart1_Rx_Task, "Uart1_Rx_Task", 5*1024, NULL, 5, NULL);数据包解析:
雷达发出来的是16 位数据 → 拆成 2 个 8 位字节发,低字节先发(LSB),高字节后发(MSB)
规则 :(高字节 << 8) | 低字节
例如 :真实转速 = 0x1234
- 低 8 位 = 0x34
- 高 8 位 = 0x12
高字节左移 8 位: 0x12 << 8 = 0x1200
低字节 或 上去: 0x1200 | 0x34 = 0x1234
0001 0010 << 8
= 0001 0010 0000 0000 → 0x1200
0001 0010 0000 0000 | 0000 0000 0011 0100
= 0001 0010 0011 0100 → 0x1234雷达测量点角度与强度值解码

c
// 6~41字节:12个点,每个点3字节
for (int i = 0; i < LD14P_POINT_PER_PACK; i++)
{
// 距离:低8位(3*i+6) + 高8位(3*i+7),LSB在前(开发手册4.2节明确)
out_pkg->points[i].distance = (protocol_buf[3*i+7] << 8) | protocol_buf[3*i+6];
out_pkg->points[i].intensity = protocol_buf[3*i+8]; // 强度:3i+8字节
}对于第一个测量点发来的雷达角度数据,高八位是数组的索引为7的位置
完整代码
c
/**
* @brief 点云解析
* @param protocol_buf 串口发来的数据包
* @param out_pkg LD14P的数据包结构体指针
* @return 执行是否成功
*/
static int LD14P_Parse_Package(uint8_t* protocol_buf, ld14p_package_t* out_pkg)
{
// LD14P固定数据包长度47字节,CRC校验前46字节
uint8_t buf_len = LD14P_PACKAGE_LEN; //非固定点数要 (protocol_buf[1] & 0x1F) * 3 + 11;
uint8_t check_num = protocol_buf[buf_len-1]; // 最后1字节是CRC8
uint8_t crc8 = LD14P_Calculate_CRC8(protocol_buf, buf_len-1); // CRC计算
// CRC校验失败,返回错误
if (crc8 != check_num)
{
ESP_LOGI(TAG, "CRC Error:%d, %d", crc8, check_num);
return ESP_FAIL;
}
// 按LD14P协议逐字节解析(开发手册4.1节,固定字节位!)
out_pkg->header = protocol_buf[0]; // 0字节:帧头0x54
out_pkg->ver_len = protocol_buf[1]; // 1字节:VerLen 0x2C
out_pkg->speed = (protocol_buf[3] << 8) | protocol_buf[2]; // 2-3字节:转速(LSB在前,MSB在后)
out_pkg->start_angle = (protocol_buf[5] << 8) | protocol_buf[4]; //4-5字节:起始角度
// 6~41字节:12个点,每个点3字节
for (int i = 0; i < LD14P_POINT_PER_PACK; i++)
{
// 距离:低8位(3*i+6) + 高8位(3*i+7),LSB在前(开发手册4.2节明确)
out_pkg->points[i].distance = (protocol_buf[3*i+7] << 8) | protocol_buf[3*i+6];
out_pkg->points[i].intensity = protocol_buf[3*i+8]; // 强度:3i+8字节
}
out_pkg->end_angle = (protocol_buf[43] << 8) | protocol_buf[42]; //42-43字节:结束角度
out_pkg->timestamp = (protocol_buf[45] << 8) | protocol_buf[44]; //44-45字节:时间戳
out_pkg->crc8 = protocol_buf[46]; //46字节:CRC8校验位
return ESP_OK;
}提取协议包并更新雷达数据包
雷达工作流程:
- 雷达转一圈,发 30 包
- 每包 12 个点
- 每包自带 起始角度、结束角度
- 计算出每个点对应的 真实角度(0~359)
- 把 12 个点按角度贴回 360° 数组
- 30 包贴完 → 得到一圈完整雷达图
计算角度步长
- 角度递增情况(12个点11个间隔)
step_angle = (pkg->end_angle - pkg->start_angle) / (LD14P_POINT_PER_PACK - 1); // 固定12点
- 角度递减情况(360~0)
step_angle = (36000 + pkg->end_angle - pkg->start_angle) / (LD14P_POINT_PER_PACK - 1);
映射每个点到0~359°数组
c
for (int i = 0; i < LD14P_POINT_PER_PACK; i++)
{
// 计算实际角度:0.01°→1°,模360防止越界
angle = ((pkg->start_angle + i * step_angle) / 100) % LD14P_POINT_MAX;
out_data->points[angle].distance = pkg->points[i].distance;
out_data->points[angle].intensity = pkg->points[i].intensity;
}模360:把任何角度强制拉回 0~359
370 % 360 = 10
400 % 360 = 40
720 % 360 = 0/100:雷达单位为0.01度,除以一百变为度
雷达坐标系转换为ROS坐标系
传感器的正前方定义为零度 方向,旋转角度沿着顺时针方向增大,
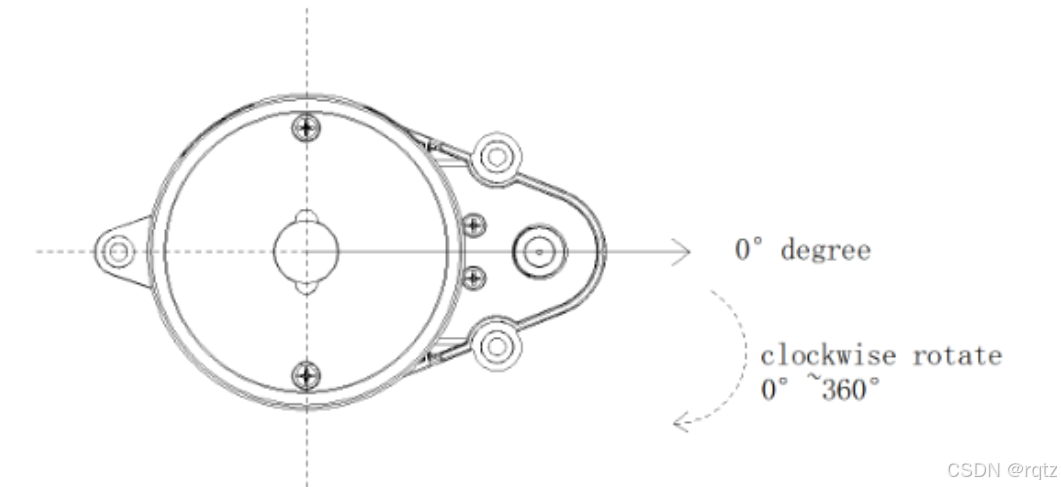
LD14P传
小车雷达硬件安装方向
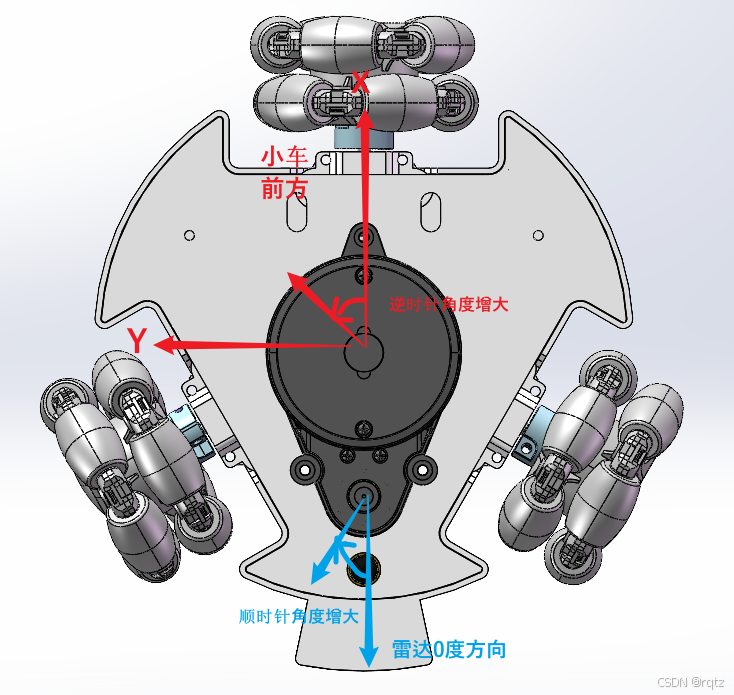
修改映射为小车ros坐标系
c
for (int i = 0; i < LD14P_POINT_PER_PACK; i++)
{
// 计算实际角度:0.01°→1°,模360防止越界
// angle = ((pkg->start_angle + i * step_angle) / 100) % LD14P_POINT_MAX;
int real_angle = pkg->start_angle + i * step_angle;
//修正坐标系为小车ROS坐标系( 18000 - real_angle 会让很多角度直接变成 0 或负数,所以多加一圈w为54000)
angle = ((54000 - real_angle) / 100) % LD14P_POINT_MAX; //模360把任何角度强制拉回 0~359
if(angle < 0) angle += 360;
out_data->points[angle].distance = pkg->points[i].distance;
out_data->points[angle].intensity = pkg->points[i].intensity;
}激光雷达数据解析任务
c
/**
* @brief 激光雷达解析数据任务
* @param arg 任务传的参数
* @return 无
*/
static void Lidar_LD14P_Task(void *arg)
{
ESP_LOGI(TAG, "Start Lidar_LD14P_Task with core:%d", xPortGetCoreID());
uint16_t rx_count = 0;
while (1)
{
rx_count = Uart1_Available();
if (rx_count)
{
// Uart1_Clean_Buffer();
for (int i = 0; i < rx_count; i++)
LD14P_Data_Receive(Uart1_Read());
}
if (LD14P_New_Package())
LD14P_Clear_New_Package_State();
// LD14P_Get_Data(&lidar_data);
else
{
vTaskDelay(pdMS_TO_TICKS(1));
}
}
vTaskDelete(NULL);
}主函数
c
void app_main(void)
{
Uart1_Init();
Lidar_LD14P_Init();
vTaskDelay(pdMS_TO_TICKS(1000));
uint16_t points[4] = {0, 90, 180, 270};
uint16_t distances[4] = {0};
while (1)
{
for (int i = 0; i < 4; i++)
distances[i] = Lidar_LD14P_Get_Distance(points[i]);
ESP_LOGI(TAG, "distance:%d, %d, %d, %d", distances[0], distances[1], distances[2], distances[3]); //单位mm
vTaskDelay(pdMS_TO_TICKS(200));
}
}输出
c
void app_main(void)
{
Uart1_Init();
Lidar_LD14P_Init();
vTaskDelay(pdMS_TO_TICKS(1000));
uint16_t points[4] = {0, 90, 180, 270};
uint16_t distances[4] = {0};
while (1)
{
for (int i = 0; i < 4; i++)
distances[i] = Lidar_LD14P_Get_Distance(points[i]);
ESP_LOGI(TAG, "distance:%d, %d, %d, %d", distances[0], distances[1], distances[2], distances[3]); //单位mm
vTaskDelay(pdMS_TO_TICKS(200));
}
}