目录
[✅ 最终标准顺时针方向数组:](#✅ 最终标准顺时针方向数组:)
[✅ 最终标准逆时针方向数组](#✅ 最终标准逆时针方向数组)
一、先搞懂坐标系
代码里的二维数组是矩阵坐标系 ,和数学坐标系不一样【方向不一样】:
数学坐标系: 矩阵坐标系:
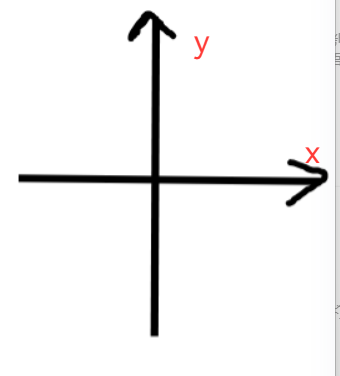
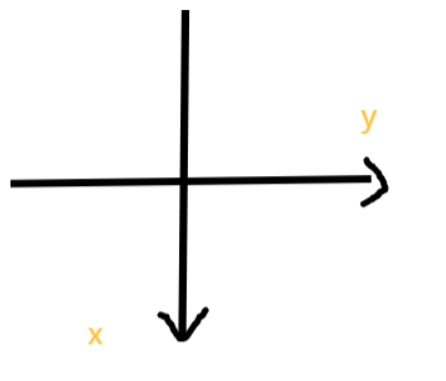
x:行号(上下移动)y:列号(左右移动)
规则:
- 向下走 →
x + 1 - 向上走 →
x - 1 - 向右走 →
y + 1 - 向左走 →
y - 1
二、方向数组的标准格式
方向数组固定是 2 个数组,各 4 个值 ,对应 4 个方向:

定义的时候这样写:dx[i] 和 dy[i] 是一对 ,代表第 i 个方向。
三、实际运用方面:
如果是顺时针进行转: 如果是逆时针进行转:
①顺时针:
顺时针顺序固定是:右 → 下 → 左 → 上(也可以是其他起始方向,这里以最直观的 "先右再顺时针绕圈" 为例)
对应变化:
- 向右:x 不变,y+1 →
dx=0, dy=1 - 向下:x+1,y 不变 →
dx=1, dy=0 - 向左:x 不变,y-1 →
dx=0, dy=-1 - 向上:x-1,y 不变 →
dx=-1, dy=0
✅ 最终标准顺时针方向数组:
int dx[4] = {0, 1, 0, -1};
int dy[4] = {1, 0, -1, 0};x+=dx\[\];y+=dy\[\]
②逆时针:
逆时针方向数组定义
逆时针顺序固定是:右 → 上 → 左 → 下(也可以是其他起始方向,这里以最直观的 "先右再逆时针绕圈" 为例)
对应变化:
- 向右 :x 不变,y+1 →
dx=0, dy=1 - 向上 :x-1,y 不变 →
dx=-1, dy=0 - 向左 :x 不变,y-1 →
dx=0, dy=-1 - 向下 :x+1,y 不变 →
dx=1, dy=0
✅ 最终标准逆时针方向数组
int dx[4] = {0, -1, 0, 1}; // 右、上、左、下(x方向变化)
int dy[4] = {1, 0, -1, 0}; // 右、上、左、下(y方向变化)x+=dx\[\];y+=dy\[\]