ROS2 Topic 传输机制:板内 vs 跨板
1. 两种传输方式
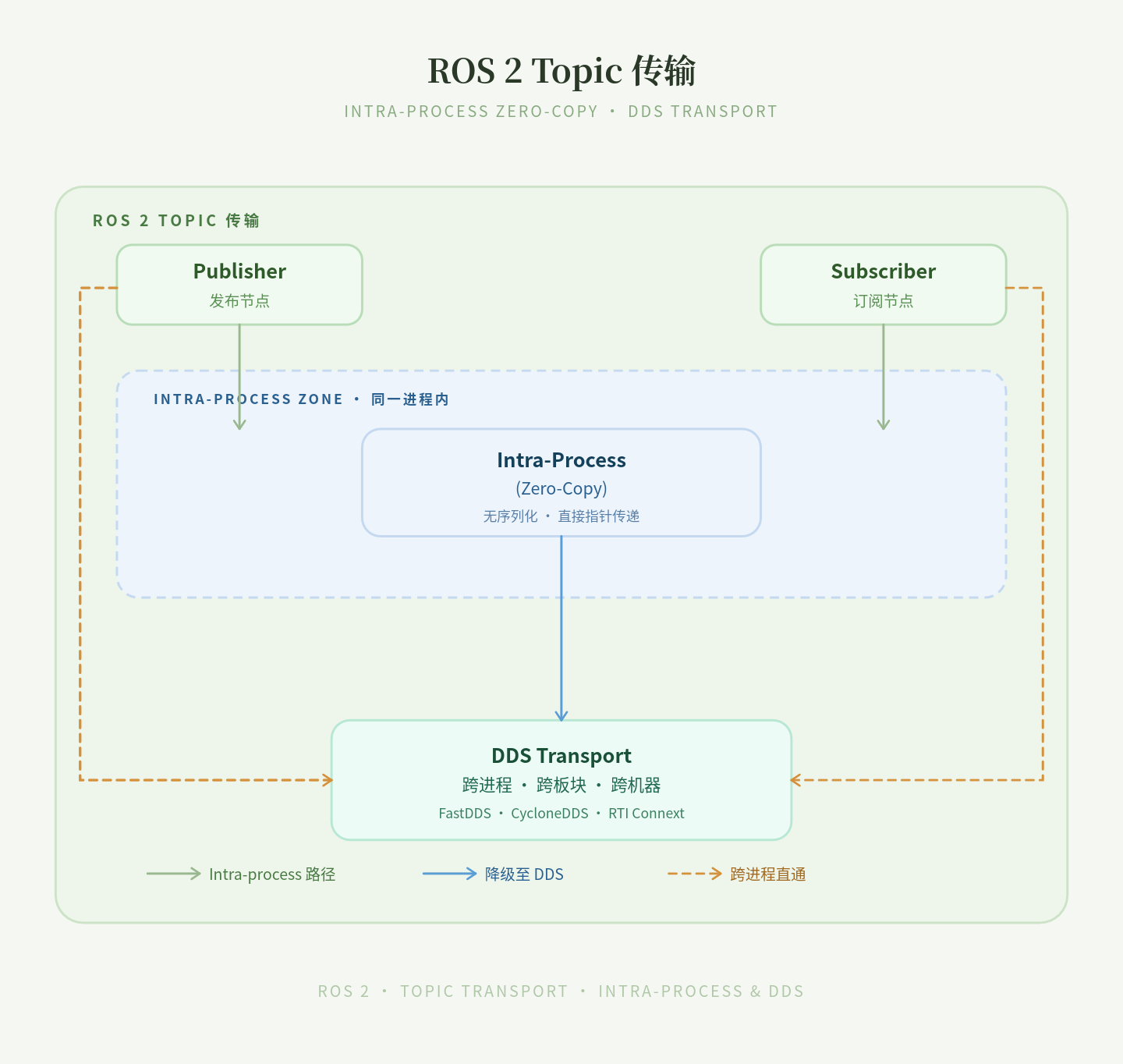
2. 传输决策逻辑
| 场景 | 传输方式 | 是否反序列化 |
|---|---|---|
| 同进程同节点 | Intra-Process (Zero-Copy) | ❌ 不需要 |
| 同进程不同节点 | Intra-Process | ❌ 不需要 |
| 不同进程 | DDS (UDP/TCP/Shared Memory) | ✅ 需要 |
| 不同板块 | DDS (网络) | ✅ 需要 |
3. Intra-Process (板内) 传输原理
核心特性
- 使用
IntraProcessBuffer直接传递消息指针 - 无需反序列化,消息以 ROS 消息对象形式传递
- Zero-Copy:发布者直接将消息存入订阅者的缓冲区
源码分析
cpp
// intra_process_buffer.hpp
// 板内传输:直接传递 shared_ptr,不经过序列化/反序列化
// 添加消息到缓冲区(共享方式)
virtual void add_shared(MessageSharedPtr msg)
{
buffer_->enqueue(std::move(shared_msg)); // 直接存入指针
}
// 从缓冲区消费消息
virtual MessageSharedPtr consume_shared()
{
return buffer_->dequeue(); // 直接取出指针,无拷贝
}传输流程
Publisher::publish()
↓
IntraProcessManager::match_publishers_to_subscriptions()
↓
IntraProcessBuffer::add_shared(msg) // 直接存入订阅者缓冲区
↓
订阅者通过 wait() 收到通知,直接取用消息对象关键代码位置
rclcpp/experimental/intra_process_manager.hpp- 进程内通信管理器rclcpp/experimental/buffers/intra_process_buffer.hpp- 进程内缓冲区rclcpp/intra_process_setting.hpp- 进程内通信配置
4. DDS 传输 (跨板) 原理
需要反序列化的原因
- DDS 层使用 CDR (Common Data Representation) 序列化
- 数据在网络上以字节流传输
- 订阅端必须反序列化为 ROS 消息对象
传输流程
Publisher::publish()
↓
rmw_publish() // 序列化: ROS Msg → CDR bytes
↓
RMW (FastDDS/CycloneDDS)
↓
网络传输 (UDP/TCP/Shmem)
↓
Subscription::take() // 反序列化: CDR bytes → ROS Msg
↓
回调函数收到消息对象5. use_intra_process_comms 配置场景
场景1: use_intra_process_comms = true
问题: 既有板内订阅,又有跨板订阅,Topic 默认用什么方式传输?
┌─────────────────────────────────────────────────────────────────────┐
│ use_intra_process_comms = true │
├─────────────────────────────────────────────────────────────────────┤
│ │
│ Publisher │
│ │ │
│ ├──► 板内订阅A ──► Intra-Process (Zero-Copy, 无序列化) │
│ │ │
│ └──► 跨板订阅B ──► DDS (需序列化) │
│ │
└─────────────────────────────────────────────────────────────────────┘答案: 同时使用两种方式
- 板内订阅 → Intra-Process (Zero-Copy,无序列化)
- 跨板订阅 → DDS (需要序列化)
Publisher 会双重发布:
- 一份通过
IntraProcessManager发给板内订阅者 - 一份通过 DDS/RMW 发给跨板订阅者
源码逻辑
sub
cpp
// IntraProcessManager 会检查匹配的订阅者
// 如果存在跨进程的订阅者,仍然会走 DDS 路径
if (can_communicate(publisher, subscription)) {
// 板内通信:IntraProcessBuffer
} else {
// 跨进程通信:DDS
}pub
cpp
publish(std::unique_ptr<T, ROSMessageTypeDeleter> msg)
{
if (!intra_process_is_enabled_) {
this->do_inter_process_publish(*msg);
return;
}
// If an interprocess subscription exist, then the unique_ptr is promoted
// to a shared_ptr and published.
// This allows doing the intraprocess publish first and then doing the
// interprocess publish, resulting in lower publish-to-subscribe latency.
// It's not possible to do that with an unique_ptr,
// as do_intra_process_publish takes the ownership of the message.
// When durability is set to TransientLocal (i.e. there is a buffer),
// inter process publish should always take place to ensure
// late joiners receive past data.
bool inter_process_publish_needed =
get_subscription_count() > get_intra_process_subscription_count() || buffer_;
if (inter_process_publish_needed) {
auto shared_msg =
this->do_intra_process_ros_message_publish_and_return_shared(std::move(msg));
if (buffer_) {
buffer_->add_shared(shared_msg);
}
this->do_inter_process_publish(*shared_msg);
} else {
if (buffer_) {
auto shared_msg =
this->do_intra_process_ros_message_publish_and_return_shared(std::move(msg));
buffer_->add_shared(shared_msg);
} else {
this->do_intra_process_ros_message_publish(std::move(msg));
}
}
}场景2: use_intra_process_comms = false
问题: 关闭后,板内和板间都有订阅,板内需要反序列化吗?
┌─────────────────────────────────────────────────────────────────────┐
│ use_intra_process_comms = false │
├─────────────────────────────────────────────────────────────────────┤
│ │
│ Publisher │
│ │ │
│ ├──► 板内订阅A ──► DDS (需序列化) ◄── 需要反序列化! │
│ │ │
│ └──► 跨板订阅B ──► DDS (需序列化) ◄── 需要反序列化 │
│ │
└─────────────────────────────────────────────────────────────────────┘答案: 需要反序列化
关闭 Intra-Process 后,所有订阅都走 DDS:
- 序列化:ROS Msg → CDR bytes
- 本地回环或网络传输
- 反序列化:CDR bytes → ROS Msg
即使是同一个板内的订阅,也需要完整的序列化/反序列化过程。
6. 对比总结
| 配置 | 板内订阅 | 跨板订阅 | 序列化/反序列化 |
|---|---|---|---|
use_intra_process_comms=true |
Intra-Process ✅ | DDS | 跨板需要 |
use_intra_process_comms=false |
DDS | DDS | 都需要 |
7. 性能影响
| 场景 | 延迟 | 备注 |
|---|---|---|
| true + 板内 | ~1μs | Zero-Copy,最优 |
| true + 跨板 | ~100μs | DDS 序列化 |
| false + 板内 | ~100μs | 吃大亏! 绕道 DDS |
| false + 跨板 | ~100μs | 正常 DDS |
8. 如何启用 Intra-Process
方式1: Node 级别默认启用
cpp
rclcpp::NodeOptions options;
options.use_intra_process_comms(true); // 默认 true
auto node = std::make_shared<rclcpp::Node>("my_node", options);方式2: Publisher/Subscriber 级别控制
cpp
// 显式启用
auto pub = node->create_publisher<std_msgs::msg::String>(
"topic",
rclcpp::QoS(10),
rclcpp::IntraProcessSetting::Enable // 显式启用
);
// 显式禁用(强制走 DDS)
auto pub2 = node->create_publisher<std_msgs::msg::String>(
"topic",
rclcpp::QoS(10),
rclcpp::IntraProcessSetting::Disable // 强制 DDS
);IntraProcessSetting 枚举
cpp
enum class IntraProcessSetting
{
Enable, // 显式启用进程内通信
Disable, // 显式禁用进程内通信
NodeDefault // 跟随 Node 的默认设置
};9. Zero-Copy 优化
我们生成的优化文件 optimized_message_pool.hpp 进一步优化了消息传递:
cpp
// Zero-Copy 消息池
class OptimizedMessagePool {
public:
// 预分配消息缓冲区
// 指针直接复用
// 减少内存分配/释放开销
MessageT* allocate(); // 从池中获取
void deallocate(MessageT* msg); // 归还到池
};10. 配置建议
推荐配置
cpp
// ✅ 推荐:保持默认启用 intra-process
rclcpp::NodeOptions options;
options.use_intra_process_comms(true); // 默认就是 true何时禁用
只有在下述情况才考虑禁用:
cpp
// 场景1:明确知道只需要跨板通信,不需要板内通信
rclcpp::NodeOptions options;
options.use_intra_process_comms(false);
// 场景2:调试时需要抓包分析 DDS 流量
// 禁用后所有流量都走 DDS,可以用 Wireshark 观察⚠️ 注意事项
- 禁用
use_intra_process_comms不会让板内订阅"变快" - 反而会强制走 DDS 路径,增加不必要的序列化开销
- 如果可能存在跨板订阅,禁用会损失性能
11. 总结
-
板内订阅 (Intra-Process):
- Zero-Copy,无需序列化/反序列化
- 延迟极低 (~1μs)
- 消息以
shared_ptr形式直接传递
-
跨板订阅 (DDS):
- 需要 CDR 序列化/反序列化
- 延迟较高 (~100μs+)
- 支持跨进程、跨机器通信
-
use_intra_process_comms = true:
- 板内:Zero-Copy,无序列化
- 跨板:DDS 序列化
- 同时支持两种路径
-
use_intra_process_comms = false:
- 全部走 DDS
- 板内也需要反序列化
- 性能最差
-
默认行为:
- ROS2 默认启用 Intra-Process
- 系统自动选择最优传输路径