在智慧养宠时代,基于视觉的宠物身份识别技术正逐步从实验室走向家庭应用。然而,与配合度高的人类不同,宠物是典型的"非合作生物识别对象"------它们不会主动配合摄像头调整姿态,更无法控制光照环境。
实际应用中,我们常面临两大核心挑战:复杂光照条件 (逆光、弱光、强光不均)和多变拍摄角度(侧脸、俯仰、遮挡)。这些因素导致传统识别模型性能急剧下降,误识率飙升。本文将系统探讨应对这些挑战的技术策略,从数据、算法到工程实现,构建鲁棒的宠物面部识别系统。

一、数据增强:构建光照与姿态不变性的第一道防线
数据增强是提升模型泛化能力最直接有效的手段。针对宠物面部识别的特殊性,需要设计针对性的增强策略。
1.1 几何变换增强:模拟姿态多样性
宠物头部姿态变化远大于人类,需要更激进的几何变换:
# PyTorch 数据增强配置示例
train_transform = transforms.Compose([
transforms.RandomResizedCrop(224, scale=(0.8, 1.0)), # 随机裁剪,模拟不同距离
transforms.RandomHorizontalFlip(p=0.5), # 水平翻转
transforms.RandomRotation(degrees=30), # 旋转±30度,模拟头部偏转
transforms.RandomAffine(degrees=0, translate=(0.1, 0.1)), # 平移变换
transforms.RandomPerspective(distortion_scale=0.2, p=0.5), # 透视变换
])关键设计原则:旋转角度需根据宠物颈部活动范围设定(通常±30°足够),平移比例不宜过大以免丢失关键面部特征。
1.2 色彩空间扰动:对抗光照变化
光照变化直接影响图像的颜色分布,通过HSV空间扰动可有效模拟:
color_jitter = transforms.ColorJitter(
brightness=0.4, # ±40%亮度变化,模拟不同光照强度
contrast=0.4, # ±40%对比度变化
saturation=0.4, # ±40%饱和度变化
hue=0.1 # ±10%色调偏移,模拟色温变化
)进阶策略:除了随机扰动,还可针对性模拟特定光照场景:
-
逆光模拟:降低整体亮度,提高对比度
-
弱光模拟:添加高斯噪声,降低饱和度
-
强光模拟:局部过曝,使用随机区域亮度增强
1.3 遮挡与纹理增强:提升特征鲁棒性
宠物面部常因毛发、阴影或物体产生局部遮挡:
# 随机擦除增强
transforms.RandomErasing(p=0.5, scale=(0.02, 0.2), ratio=(0.3, 3.3))马赛克增强(Mosaic Augmentation)将四张图像拼接为一张,迫使模型学习在复杂背景和小目标场景下的定位能力,这在多宠家庭场景中尤为重要。
二、图像预处理:光照归一化与特征增强
在数据进入模型前,预处理阶段可显著改善输入质量。
2.1 光照归一化技术
直方图均衡化:重新分布像素强度,增强对比度,但对全局光照变化敏感。
Retinex理论应用:将图像分解为光照分量和反射分量,单独处理光照变化。公式表示为:
I(x,y)=L(x,y)⋅R(x,y)其中 I为观测图像,L为光照分量,R为反射分量(物体本质属性)。通过估计并去除 L,可获得光照不变的 R。
差分高斯滤波(DOG):作为预处理步骤,DOG滤波器能增强边缘对比度,减少光照变化影响。研究表明,将DOG处理后的图像与原始图像融合,能在不损失正常光照图像信息的前提下,显著提升极端光照条件下的识别率。
2.2 自适应曝光补偿
针对逆光等极端场景,可采用基于面部区域检测的曝光补偿:
-
检测宠物面部区域
-
计算区域平均亮度
-
动态调整全局或局部曝光参数
-
使用CLAHE(限制对比度自适应直方图均衡化)增强局部细节
三、姿态校正与归一化:消除角度变异
同一宠物在不同角度下提取的特征在特征空间中可能相距甚远,直接识别难度极大。姿态校正是解决此问题的关键。
3.1 关键点检测与标准化
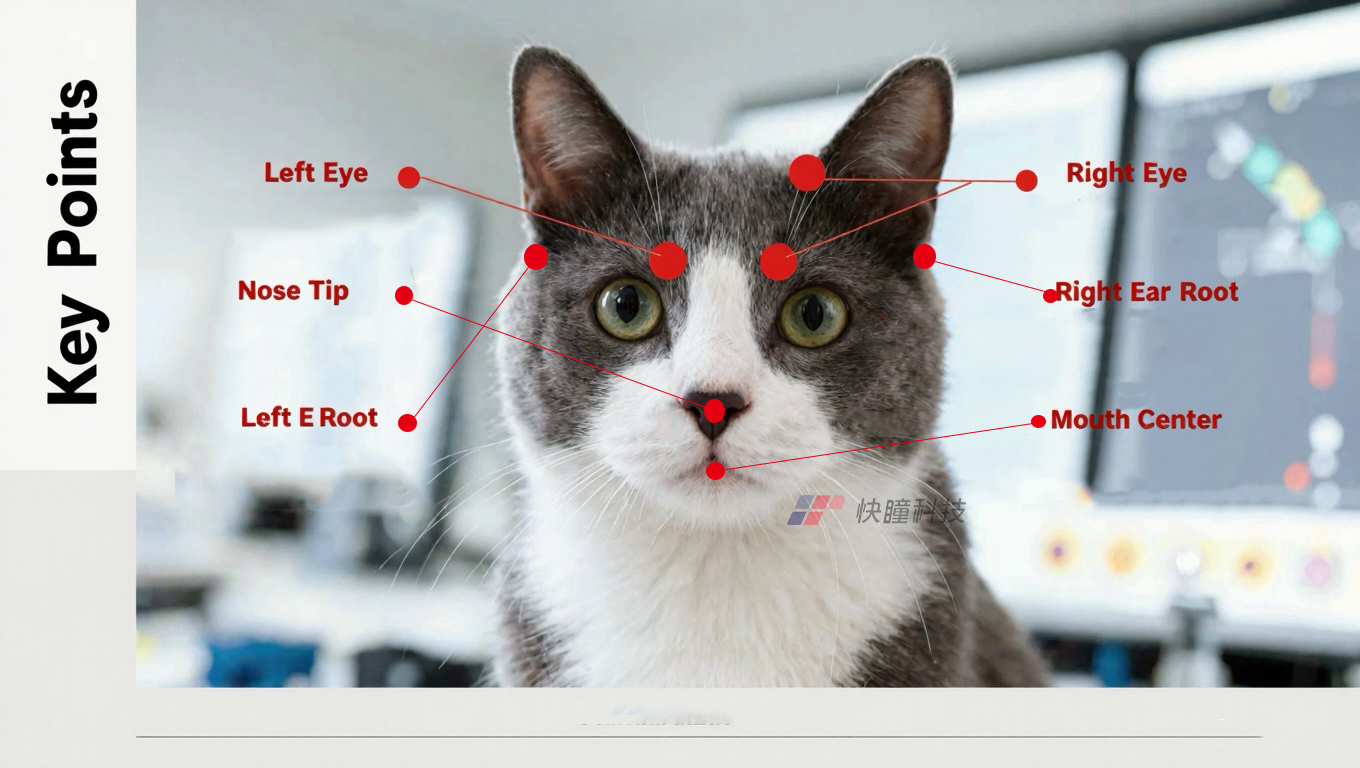
宠物面部关键点通常包括:左眼、右眼、鼻尖、左耳根、右耳根、嘴部中心等。基于深度学习的关键点检测模型(如HRNet、MobileNet)可实时定位这些点。
跨物种适配:不同物种的关键点定义需调整。猫需增加耳朵尖点,犬类则更关注口鼻部特征点。
3.2 相似性变换归一化
检测到关键点后,通过相似性变换将任意姿态的宠物面部映射到标准正面视图:
x′y′1=scosθssinθ0−ssinθscosθ0txty1xy1其中 (x,y)为原始坐标,(x′,y′)为标准坐标,s为缩放因子,θ为旋转角度,(tx,ty)为平移向量。
实现优势:
-
计算简单,仅需矩阵运算,适合边缘部署
-
消除姿态变化,让网络专注于身份判别特征(纹理、斑纹等)
-
显著降低类内差异,提高相似个体区分度
3.3 3D姿态估计进阶
对于更精确的校正,可采用3D姿态估计。通过PnP(Perspective-n-Point)算法求解头部相对于相机的旋转和平移,实现真正的三维归一化。
四、模型架构优化:设计光照与姿态鲁棒的神经网络
4.1 注意力机制引导的特征学习
传统CNN可能过度关注光照敏感的浅层纹理特征。引入通道注意力 (如SE模块)和空间注意力机制,让网络动态关注判别性更强的区域。
双路径网络设计:一路处理原始图像,捕捉细节纹理;另一路处理光照归一化后的图像,学习光照不变特征。两路特征在高层融合,兼顾细节与鲁棒性。
4.2 多尺度特征融合
宠物面部尺度变化大(近景特写 vs 远景全身),需要多尺度特征融合:
-
特征金字塔网络(FPN):融合浅层细节特征与高层语义特征
-
HRNet架构:保持高分辨率表征 throughout 网络,适合关键点检测任务
-
自适应池化:应对不同输入尺寸
4.3 光照不变特征学习
对抗训练策略:引入光照分类器作为判别器,主网络在提取特征的同时要"欺骗"判别器无法判断光照条件,从而学习光照不变特征。
度量学习优化:使用ArcFace、CosFace等损失函数,增大类间距离、减小类内距离,特别关注同一宠物在不同光照/角度下的特征聚集。
五、训练策略与损失函数设计
5.1 渐进式课程学习
从易到难训练策略:
-
阶段一:正常光照、正面姿态样本
-
阶段二:加入轻度光照变化和角度变化
-
阶段三:极端光照、大角度、遮挡样本
-
阶段四:真实场景混合样本
5.2 多任务联合学习
共享主干网络,同时学习:
-
主任务:宠物身份识别
-
辅助任务1:光照条件分类(强制网络编码光照信息)
-
辅助任务2:头部姿态估计(3个自由度)
-
辅助任务3:面部关键点检测
多任务学习通过共享表示和归纳迁移提升主任务性能。
5.3 损失函数组合
L=Lid+λ1Ltriplet+λ2Lpose+λ3Lillum其中:
-
Lid:身份分类损失(CrossEntropy)
-
Ltriplet:三元组损失,增强特征判别性
-
Lpose:姿态一致性损失,约束同一宠物不同姿态的特征距离
-
Lillum:光照不变性损失
六、端到端系统优化与部署考量
6.1 实时性优化
宠物识别常部署在边缘设备(智能摄像头、喂食器),需平衡精度与速度:
-
模型轻量化:使用MobileNet、ShuffleNet等轻量主干
-
知识蒸馏:大模型指导小模型训练
-
量化与剪枝:INT8量化,结构化剪枝
-
硬件感知优化:针对特定NPU/GPU优化算子
6.2 增量学习与在线适应
宠物外观会随时间变化(换毛、成长、受伤),系统需支持:
-
增量学习:在不遗忘旧知识的前提下学习新样本
-
在线微调:根据新采集数据动态调整模型
-
联邦学习:多个设备协同训练,保护隐私同时提升泛化
七、实验验证与性能评估
7.1 基准数据集构建
评估光照与角度鲁棒性需要专门的数据集,应包含:
-
光照维度:强光、弱光、逆光、侧光、混合光
-
姿态维度:水平旋转(-90°到90°)、俯仰(-45°到45°)
-
物种覆盖:至少包含常见犬猫品种
-
样本规模:每只宠物在不同条件下的多张图像
7.2 评估指标
除常规的准确率、召回率外,需特别关注:
-
光照不变性指数:同一宠物不同光照下的特征相似度
-
姿态不变性指数:同一宠物不同角度下的特征相似度
-
跨条件识别率:训练集与测试集光照/姿态条件差异时的性能
7.3 消融实验设计
通过系统性的消融实验验证各模块贡献:
-
基准模型(无增强、无校正)
-
+数据增强
-
+光照归一化
-
+姿态校正
-
+模型优化
-
完整系统
八、未来研究方向
8.1 自监督预训练
利用大量无标注宠物图像进行自监督预训练(如SimCLR、MoCo),学习通用视觉表示,再在下游任务微调。
8.2 神经辐射场(NeRF)应用
构建宠物的3D神经表示,可渲染任意视角、任意光照下的图像,从根本上解决视角和光照变化问题。
8.3 跨模态融合
结合红外、深度等多模态信息,红外图像对光照变化不敏感,深度信息有助于姿态估计。
8.4 个性化自适应
为每只宠物建立轻量化的个性化适配模块,在通用模型基础上微调,实现"越用越准"。
结语
面向复杂光照与角度的宠物面部识别鲁棒性增强是一个系统工程,需要数据、算法、工程的协同优化。从数据增强模拟真实变异,到预处理消除干扰因素,再到模型学习不变特征,每一环都至关重要。
随着边缘计算能力提升和算法不断创新,未来的宠物识别系统将更加智能、鲁棒,真正实现"在任何光照、任何角度下,一眼认出你的爱宠"。这不仅是一项技术挑战,更是科技温暖生活的生动体现------当算法能够理解并适应宠物的不配合,我们离真正自然的人机交互又近了一步。
参考文献
更多宠物视觉识别技术,搜索"快瞳科技"!宠物视觉识别端侧方案算法服务!