导读:近日,Pointcloud公司研究团队在《Nature》上发表了一项里程碑式的研究,展示了一款集成超过60万个光子组件的相干4D成像传感器。该传感器采用352×176像素的FMCW LiDAR焦平面阵列,实现了65米探测距离、0.06°角分辨率和同步测速能力,能耗低至46 nJ/点。本文将深入解读其系统架构、核心技术和性能突破。
1. 背景:3D感知的挑战与FMCW LiDAR的优势
精准的三维环境感知是自动驾驶、工业自动化、增强现实等领域的核心技术需求。尽管CMOS图像传感器已在2D成像领域取得巨大成功,但在3D世界中,高分辨率、长距离、低功耗的解决方案仍面临挑战。
现有技术如飞行时间(ToF)LiDAR受限于能量和分辨率,机械旋转式LiDAR体积大且可靠性差,光学相控阵(OPA)则面临宽视场角和高分辨率难以兼得的困境。
频率调制连续波(FMCW)LiDAR结合相干检测,不仅可同时测量距离和速度,还具备抗干扰、低功耗等优势。而焦平面阵列(FPA)架构则将发射和接收功能集成于像素阵列中,有望实现类似CMOS相机的小型化、低成本4D成像。
2. 系统总体架构
本文提出的4D成像系统如图1所示。系统由以下几个核心部分组成:
-
光源与调制:1310 nm DFB激光器 + 硅光子IQ马赫-曾德尔调制器(MZM),产生线性调频光信号(上/下啁啾各32 μs,带宽6 GHz)。
-
光放大与分发:两级光放大器(BOA),将信号分至16路光纤,耦合至FPA芯片。
-
FPA芯片:352×176像素阵列,包含超过60万个光子组件,所有电子电路(TIA、开关驱动、数字接口)单片集成。
-
光学镜头:商用SWIR镜头(f=25/35/50 mm),决定视场角和角分辨率。
-
控制与采集:基于AMD Zynq UltraScale+ RFSoC,实现数字波形生成、ADC采样(4.096 GSPS)、实时FFT和峰值检测。
图1展示了芯片显微图像和光路选择机制。16个光纤输入通过两级热光开关网络(第一级1:32,第二级1:16)将光引导至7744个8像素行,实现全阵列寻址。
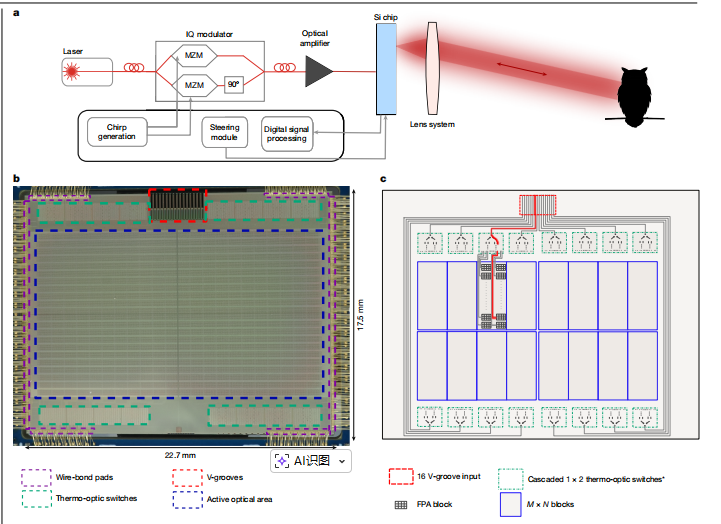
图1:a,系统架构;b,芯片显微图像;c,光路选择示意图。(来源:Nature论文)
3. 像素设计与单站式架构
每个像素采用单站式(monostatic)设计------同一对光栅耦合器同时用作发射天线和接收天线。如图2所示,来自开关网络的FMCW光经1:8分路器后进入像素,其中一部分作为本振(LO),另一部分通过光栅耦合器发射至目标。回波光与LO在50/50定向耦合器混合,由平衡Ge PIN光电探测器转换为电信号,再经片上TIA放大。
这种设计避免了像素间的光串扰,且仅需单个成像透镜,无需对准收发光路。
为提升耦合效率,研究团队在芯片上沉积了定制设计的凹面微透镜(图2c),用于调整光束发射角度和发散角,使光束更好地匹配成像透镜孔径。
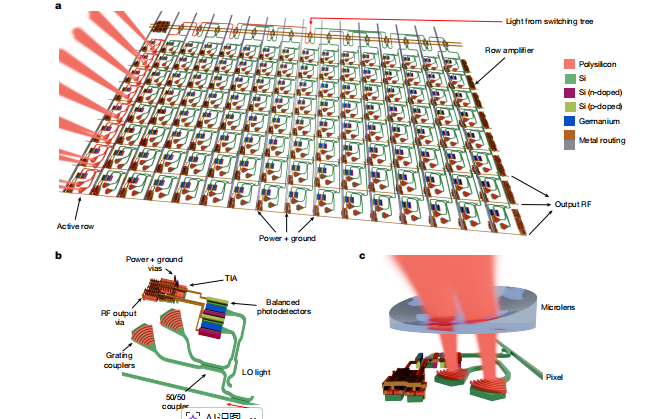
图2:a,FPA块示意图;b,像素内部光路;c,微透镜作用示意。(来源:Nature论文)
4. 光学性能与成像结果
系统采用不同焦距镜头实现了多种视场角和角分辨率(图3)。在办公室场景(6-11 m)中,35 mm镜头提供32.6°×19.3°视场角,角分辨率0.06°。对65 m外建筑物的成像显示,窗户和外墙细节清晰可辨,所用能量仅46 nJ/点,平均输出功率178 μW。
图3c展示了旋转圆盘的4D点云,颜色代表径向速度,验证了系统同时测速的能力。
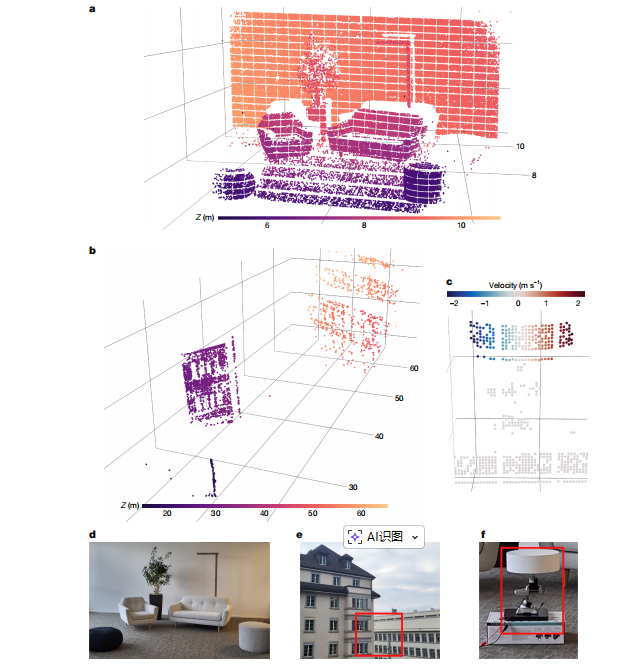
*图3:a,办公室场景点云;b,远处建筑点云;c,旋转圆盘速度注释点云;d-f,对应场景照片。(来源:Nature论文)*
5. 噪声分析与信噪比模型
论文详细分析了系统的噪声特性。每个像素的光功率分布如图4a所示,平均本振功率10.1 μW。定义散粒噪声与放大器噪声之比κ = I_shot / I_amp,阵列中κ平均值为0.62(图4b)。相比纯散粒噪声受限系统,这导致约5.6 dB的SNR损失(图4c)。
未来通过增加本振功率或TIA增益使κ > 2,即可实现散粒噪声极限。
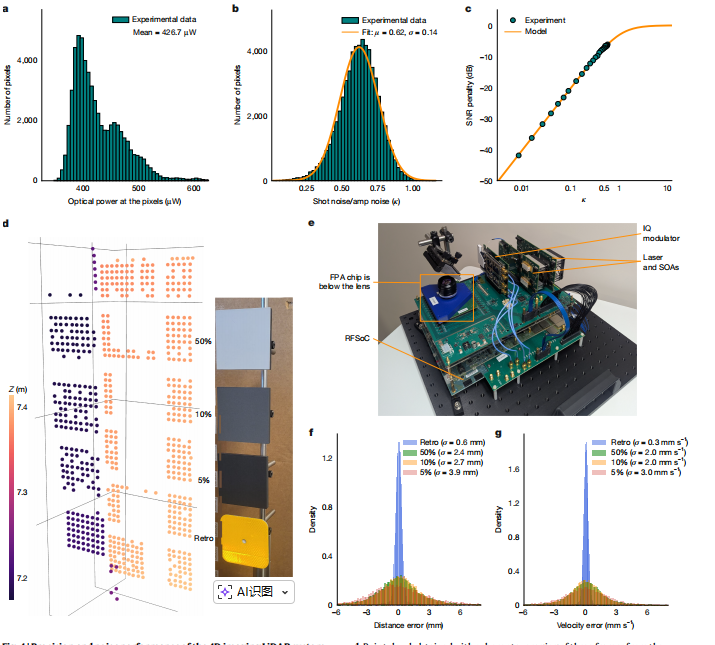
图4:a,像素光功率分布;b,κ值分布;c,SNR损失曲线;f,g,距离和速度测量误差。(来源:Nature论文)
6. 关键参数与对比
下表将本文工作与现有先进LiDAR系统进行了对比(来自Extended Data Table 1):
| 工作 | 像素规模 | 视场角 (°) | 角分辨率 (°) | 距离 (m) | 能量/点 (nJ) | 收发集成 | CMOS集成 |
|---|---|---|---|---|---|---|---|
| 本文 | 352×176 | 23.1×13.5 | 0.06×0.06 | 65 | 46 | ✓ | ✓ |
| Rogers等 (2021) | 32×16 | 1.5×1.9 | 0.05×0.05 | 75 | 212 | × | ✓ |
| Zhang等 (2022) | 128×128 | 70×70 | 0.6×0.6 | 10 | 320 | ✓ | × |
| Poulton等 (2022) | 8192 ch | 100×17 | 0.04×0.01 | 35 | 1700 | ✓ | ✓ |
可见,本文在像素规模、能量效率、集成度方面均具显著优势。
7. 信号处理与数据采集
系统采用上下啁啾各32 μs,总带宽6 GHz,理论距离分辨率ΔR = c/(2B) = 25 mm。回波信号经TIA放大后,由RFSoC的4.096 GSPS ADC数字化,下采样至256 MSPS后进行加窗FFT(8192点)。峰值检测由FPGA实时完成,并插值计算精确频率,再结合上下啁啾解算距离和速度。
当前由于仅有8个ADC通道并行,帧率约为1 fps。若128个输出全部并行,帧率可达15 fps。
8. 未来改进方向
作者指出,下一代FPA将:
-
通过增加本振功率或TIA增益,实现散粒噪声极限,提升SNR约5.6 dB。
-
采用Si-SiN混合光波导,突破硅的非线性吸收限制,将单像素发射功率提高10倍,结合SNR优化,探测距离可扩展至200米以上。
-
将第二级开关移至阵列外部,消除远场中的间隙,实现均匀像素排布。
9. 结论
本文展示的FMCW LiDAR FPA是迄今最大规模的相干焦平面阵列,像素数达61,952,光子组件超60万。其单站式像素设计、片上集成电子、灵活的开关网络以及低功耗特性,使其成为CMOS级4D成像的有力候选者。随着后续优化,该技术有望在自动驾驶、机器人、增强现实等领域引发新一轮感知革命。
参考资料
1 Settembrini et al., Nature 2026, s41586-026-10183-6.
2 文中所有图片均来源于该论文,版权归原作者所有。