1. 安装环境工具
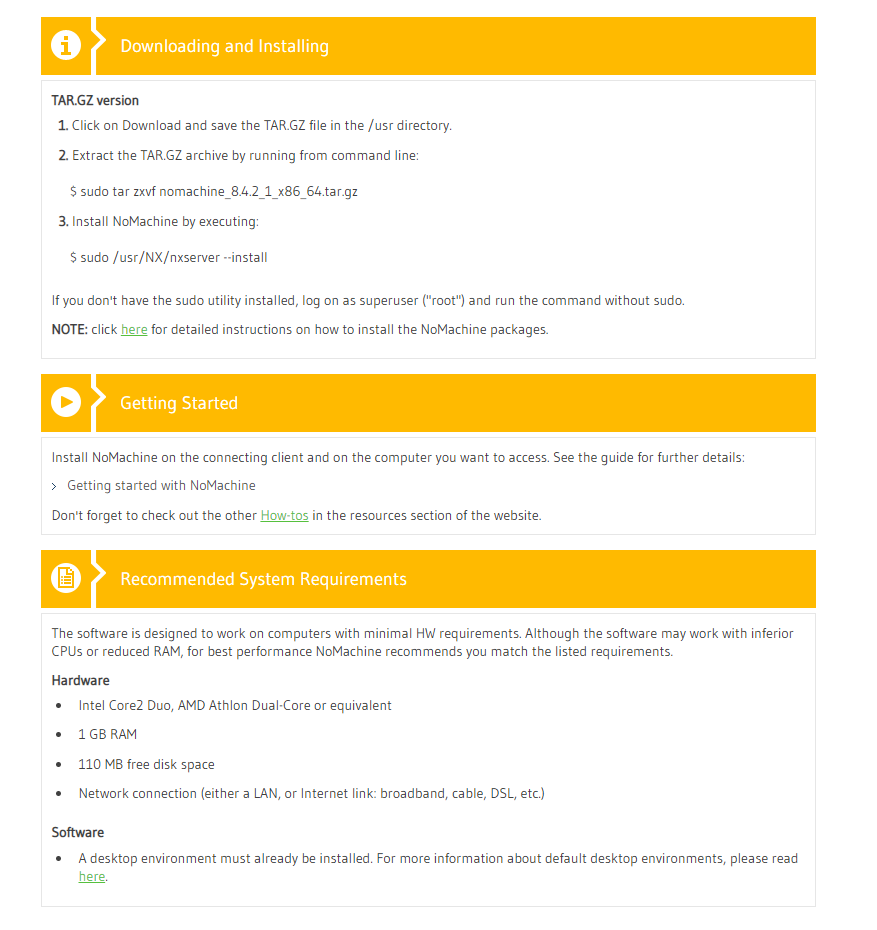
1.1 NoMachine
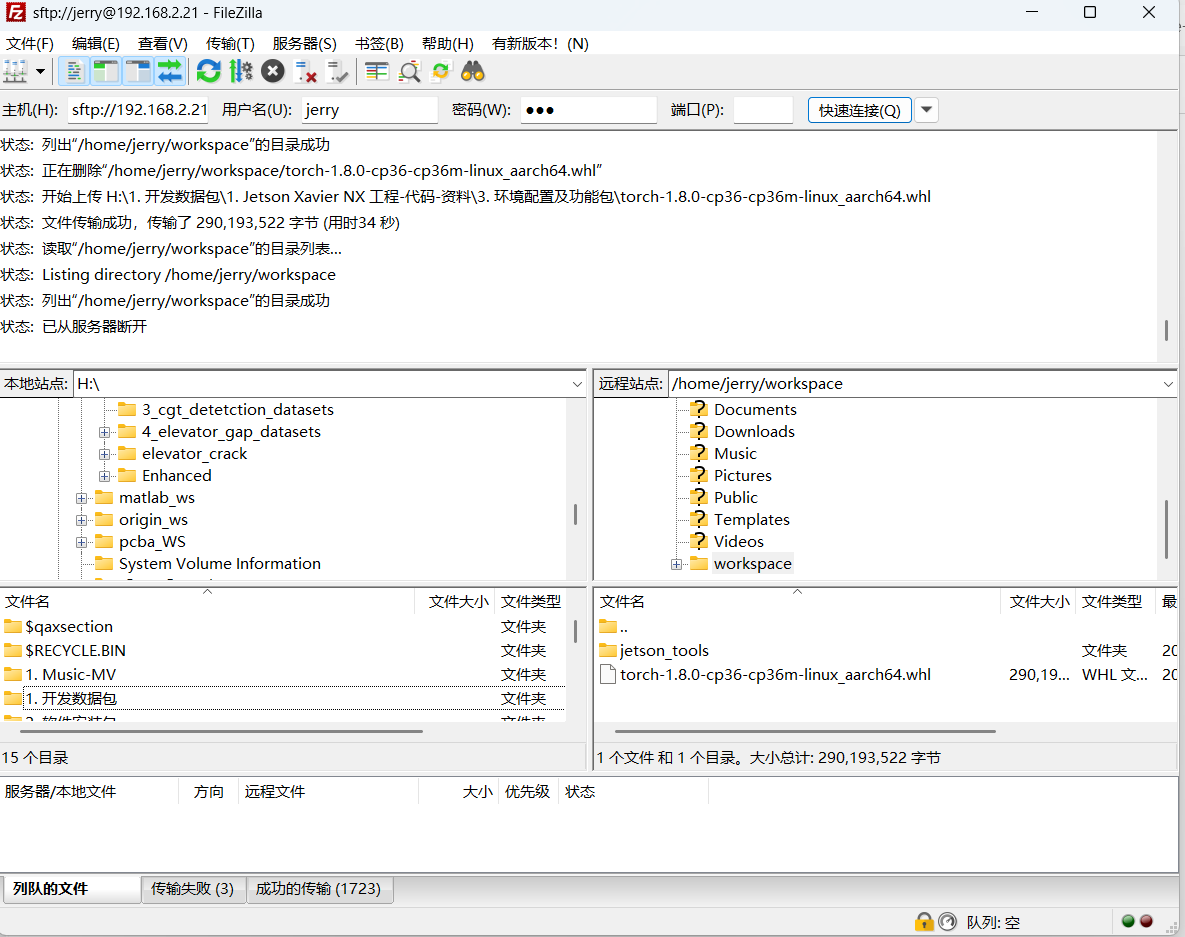
1.2 Filezila

bash
sudo apt-get install filezilla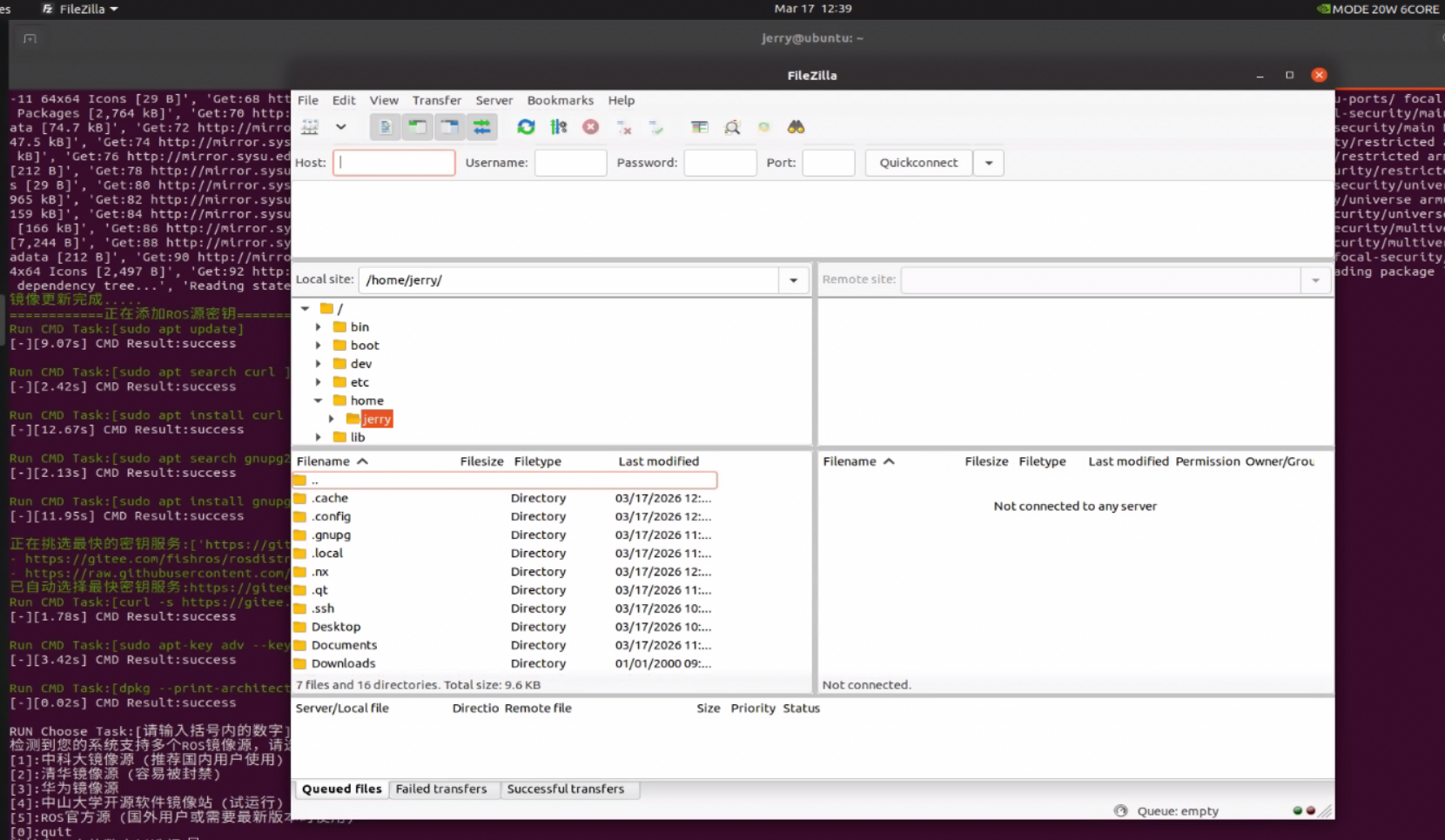
1.3 Jtop
bash
pip3 install jetson-stats
jetson_release -v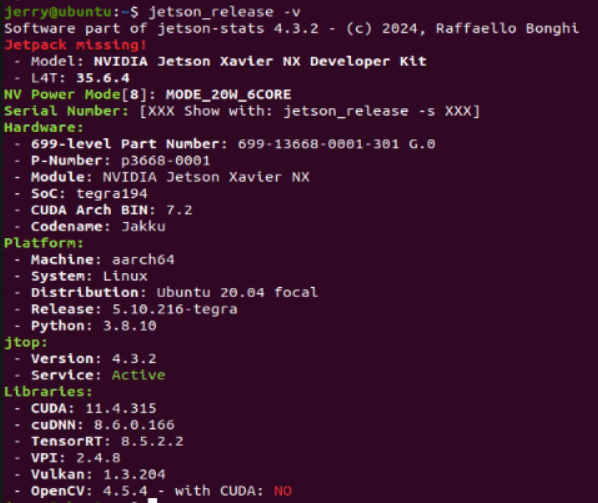
2. 换源+ROS安装(ROS1 - ROS2)
bash
wget http://fishros.com/install -O fishros && . fishrosRun CMD Task:dpkg --print-architecture
-0.01s CMD Result:success
Run CMD Task:mkdir -p /tmp/fishinstall/tools/translation/assets
-0.00s CMD Result:success
Run CMD Task:wget https://fishros.org.cn/forum/topic/1733 -O /tmp/t1733 -q --no-check-certificate --timeout 10 \&\& rm -rf /tmp/t1733
-0.00s CMD Result:success
已为您切换语言至当前所在国家语言:zh_CN
基础检查通过...
===============================================================================
======欢迎使用一键安装工具,人生苦短,三省吾身,省时省力省心!=======
======一键安装已开源,请放心使用:https://github.com/fishros/install =======
===============================================================================
.-~~~~~~~~~-._ _.-~~~~~~~~~-.
.' ~. .~ `.
.'// 开卷有益 \./ 书山有路 \ `.
.'// 可以多看看小鱼的文章 | 关注B站鱼香ROS机器人 \ `.
.'// .-~~~~~~~~~~~~~~-._ | _,-~~~~~~~~~~~. \`.
.'//.-" `-. | .-' "-.\`.
.'//.============-.. \ | / ..-============.\`.
.'\|/`
RUN Choose Task:请输入括号内的数字
---众多工具,等君来用---
ROS相关:
1:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
3:一键安装:rosdep(小鱼的rosdepc,又快又好用)
4:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
9:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
11:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
16:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)
AI板块:
6:一键安装:NodeJs环境
14:一键安装:科学上网代理工具
18:一键安装/卸载:OpenCode(AI编程助手)
常用软件:
2:一键安装:github桌面版(小鱼常用的github客户端)
7:一键安装:VsCode开发工具
8:一键安装:Docker
10:一键安装:微信(可以在Linux上使用的微信)
12:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
15:一键安装:QQ for Linux
配置工具:
5:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
13:一键配置:python国内源
17:一键配置: Docker代理(支持VPN+代理服务两种模式)
0:quit
请输入\[\]内的数字以选择:1
Run CMD Task:wget http://mirror.fishros.com/install/tools/tool_install_ros.py -O /tmp/fishinstall/tools/tool_install_ros.py --no-check-certificate
-0.07s CMD Result:success 169|:80... connected.
Run CMD Task:wget http://mirror.fishros.com/install/tools/tool_config_rosenv.py -O /tmp/fishinstall/tools/tool_config_rosenv.py --no-check-certificate
-0.06s CMD Result:success 169|:80... connected.
Run CMD Task:wget http://mirror.fishros.com/install/tools/tool_config_system_source.py -O /tmp/fishinstall/tools/tool_config_system_source.py --no-check-certificate
-0.06s CMD Result:success 169|:80... connected.urce.py
欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供
欢迎使用ROS开箱子工具,本工具由鱼香ROS小鱼贡献..
小鱼:检测当前系统ubuntu20.04:focal 支持一键安装ROS
=========接下来这一步很很很很重要,如果不知道怎么选请选择1========
RUN Choose Task:请输入括号内的数字
新手或首次安装一定要一定要一定要换源并清理三方源,换源!!!系统默认国外源容易失败!!
1:更换系统源再继续安装
2:不更换继续安装
0:quit
请输入\[\]内的数字以选择:1
RUN Choose Task:请输入括号内的数字
请选择换源方式,如果不知道选什么请选2
1:仅更换系统源
2:更换系统源并清理第三方源
0:quit
请输入\[\]内的数字以选择:2
Run CMD Task:sudo rm -rf /etc/apt/sources.list
-0.00s CMD Result:success
删除一个资源文件
Run CMD Task:sudo rm -rf /etc/apt/sources.list.d
-0.00s CMD Result:success
Run CMD Task:sudo mkdir -p /etc/apt/sources.list.d
-0.00s CMD Result:success
源选择方式说明:
自动测速选择最快的源: 系统将自动测试各个源的速度,并选择最快的源
根据测速结果手动选择源: 系统将测试各个源的速度,然后让您从测试结果中选择
RUN Choose Task:请输入括号内的数字
请选择源的选择方式
1:自动测速选择最快的源
2:根据测速结果手动选择源
0:quit
请输入\[\]内的数字以选择:1
Run CMD Task:dpkg --print-architecture
-0.01s CMD Result:success
检测到当前系统:ubuntu 架构:arm64 代号:focal,正在为你搜索适合的源...
搜索到可用源:'https://ports.ubuntu.com/ubuntu-ports', 'https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports', 'https://mirror.sysu.edu.cn/ubuntu-ports/', 'https://ports.ubuntu.com/ubuntu-ports', 'https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports', 'http://ports.ubuntu.com/ubuntu-ports', 'http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports', 'http://mirror.sysu.edu.cn/ubuntu-ports/', 'http://ports.ubuntu.com/ubuntu-ports', 'http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports'
接下来将进行自动测速以为您选择最快的源:
http://ports.ubuntu.com/ubuntu-ports 延时:0.85s
http://ports.ubuntu.com/ubuntu-ports 延时:1.00s
为您选择最快镜像源:http://mirror.sysu.edu.cn/ubuntu-ports/
创建文件:/etc/apt/sources.list
Run CMD Task:sudo mv /tmp/a113f8a3-9015-481c-b739-4cd3378b6ce6_sources.list /etc/apt/sources.list
-0.00s CMD Result:success
替换镜像源完成,尝试进行更新....
Run CMD Task:sudo apt update
-\]\[46.06s\] CMD Result:success em.erse DEP-11 64x64@2 Icons \[29 B\]\]\]
搞定了,不信你看,累死宝宝了,还不快去给小鱼点个赞~
'Get:1 http://mirror.sysu.edu.cn/ubuntu-ports/ focal InRelease \[265 kB\]', 'Get:2 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates InRelease \[128 kB\]', 'Get:3 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports InRelease \[128 kB\]', 'Get:4 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security InRelease \[128 kB\]', 'Get:5 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main arm64 Packages \[940 kB\]', 'Get:6 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main Translation-en \[506 kB\]', 'Get:7 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main arm64 DEP-11 Metadata \[489 kB\]', 'Get:8 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main DEP-11 48x48 Icons \[98.4 kB\]', 'Get:9 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main DEP-11 64x64 Icons \[163 kB\]', 'Get:10 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/main DEP-11 64x64@2 Icons \[15.8 kB\]', 'Get:11 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/restricted arm64 Packages \[1,300 B\]', 'Get:12 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/restricted Translation-en \[6,212 B\]', 'Get:13 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe arm64 Packages \[8,458 kB\]', 'Get:14 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe Translation-en \[5,124 kB\]', 'Get:15 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe arm64 DEP-11 Metadata \[3,587 kB\]', 'Get:16 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe DEP-11 48x48 Icons \[3,016 kB\]', 'Get:17 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe DEP-11 64x64 Icons \[7,794 kB\]', 'Get:18 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/universe DEP-11 64x64@2 Icons \[44.3 kB\]', 'Get:19 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse arm64 Packages \[114 kB\]', 'Get:20 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse Translation-en \[104 kB\]', 'Get:21 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse arm64 DEP-11 Metadata \[44.9 kB\]', 'Get:22 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse DEP-11 48x48 Icons \[23.1 kB\]', 'Get:23 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse DEP-11 64x64 Icons \[192 kB\]', 'Get:24 http://mirror.sysu.edu.cn/ubuntu-ports/ focal/multiverse DEP-11 64x64@2 Icons \[214 B\]', 'Get:25 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main arm64 Packages \[3,080 kB\]', 'Get:26 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main Translation-en \[600 kB\]', 'Get:27 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main arm64 DEP-11 Metadata \[276 kB\]', 'Get:28 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main DEP-11 48x48 Icons \[64.2 kB\]', 'Get:29 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main DEP-11 64x64 Icons \[103 kB\]', 'Get:30 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/main DEP-11 64x64@2 Icons \[29 B\]', 'Get:31 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted arm64 Packages \[63.5 kB\]', 'Get:32 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted Translation-en \[548 kB\]', 'Get:33 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted arm64 DEP-11 Metadata \[212 B\]', 'Get:34 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted DEP-11 48x48 Icons \[29 B\]', 'Get:35 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted DEP-11 64x64 Icons \[29 B\]', 'Get:36 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/restricted DEP-11 64x64@2 Icons \[29 B\]', 'Get:37 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe arm64 Packages \[1,187 kB\]', 'Get:38 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe Translation-en \[303 kB\]', 'Get:39 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe arm64 DEP-11 Metadata \[446 kB\]', 'Get:40 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe DEP-11 48x48 Icons \[297 kB\]', 'Get:41 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe DEP-11 64x64 Icons \[520 kB\]', 'Get:42 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/universe DEP-11 64x64@2 Icons \[29 B\]', 'Get:43 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse arm64 Packages \[13.1 kB\]', 'Get:44 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse Translation-en \[8,316 B\]', 'Get:45 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse arm64 DEP-11 Metadata \[212 B\]', 'Get:46 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse DEP-11 48x48 Icons \[1,867 B\]', 'Get:47 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse DEP-11 64x64 Icons \[2,497 B\]', 'Get:48 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-updates/multiverse DEP-11 64x64@2 Icons \[29 B\]', 'Get:49 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main arm64 Packages \[45.4 kB\]', 'Get:50 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main Translation-en \[16.3 kB\]', 'Get:51 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main arm64 DEP-11 Metadata \[5,240 B\]', 'Get:52 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main DEP-11 48x48 Icons \[7,156 B\]', 'Get:53 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main DEP-11 64x64 Icons \[10.7 kB\]', 'Get:54 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/main DEP-11 64x64@2 Icons \[29 B\]', 'Get:55 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/restricted arm64 DEP-11 Metadata \[216 B\]', 'Get:56 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/restricted DEP-11 48x48 Icons \[29 B\]', 'Get:57 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/restricted DEP-11 64x64 Icons \[29 B\]', 'Get:58 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/restricted DEP-11 64x64@2 Icons \[29 B\]', 'Get:59 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe arm64 Packages \[24.3 kB\]', 'Get:60 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe Translation-en \[16.3 kB\]', 'Get:61 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe arm64 DEP-11 Metadata \[30.5 kB\]', 'Get:62 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe DEP-11 48x48 Icons \[13.3 kB\]', 'Get:63 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe DEP-11 64x64 Icons \[22.7 kB\]', 'Get:64 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/universe DEP-11 64x64@2 Icons \[29 B\]', 'Get:65 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/multiverse arm64 DEP-11 Metadata \[212 B\]', 'Get:66 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/multiverse DEP-11 48x48 Icons \[29 B\]', 'Get:67 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/multiverse DEP-11 64x64 Icons \[29 B\]', 'Get:68 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-backports/multiverse DEP-11 64x64@2 Icons \[29 B\]', 'Get:69 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main arm64 Packages \[2,764 kB\]', 'Get:70 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main Translation-en \[518 kB\]', 'Get:71 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main arm64 DEP-11 Metadata \[74.7 kB\]', 'Get:72 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main DEP-11 48x48 Icons \[27.5 kB\]', 'Get:73 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main DEP-11 64x64 Icons \[47.5 kB\]', 'Get:74 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/main DEP-11 64x64@2 Icons \[29 B\]', 'Get:75 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted arm64 Packages \[59.0 kB\]', 'Get:76 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted Translation-en \[527 kB\]', 'Get:77 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted arm64 DEP-11 Metadata \[212 B\]', 'Get:78 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted DEP-11 48x48 Icons \[29 B\]', 'Get:79 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted DEP-11 64x64 Icons \[29 B\]', 'Get:80 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/restricted DEP-11 64x64@2 Icons \[29 B\]', 'Get:81 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe arm64 Packages \[965 kB\]', 'Get:82 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe Translation-en \[221 kB\]', 'Get:83 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe arm64 DEP-11 Metadata \[159 kB\]', 'Get:84 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe DEP-11 48x48 Icons \[95.4 kB\]', 'Get:85 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe DEP-11 64x64 Icons \[166 kB\]', 'Get:86 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/universe DEP-11 64x64@2 Icons \[29 B\]', 'Get:87 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse arm64 Packages \[7,244 B\]', 'Get:88 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse Translation-en \[6,448 B\]', 'Get:89 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse arm64 DEP-11 Metadata \[212 B\]', 'Get:90 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse DEP-11 48x48 Icons \[1,867 B\]', 'Get:91 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse DEP-11 64x64 Icons \[2,497 B\]', 'Get:92 http://mirror.sysu.edu.cn/ubuntu-ports/ focal-security/multiverse DEP-11 64x64@2 Icons \[29 B\]', 'Fetched 44.7 MB in 20s (2,213 kB/s)', 'Reading package lists...', 'Building dependency tree...', 'Reading state information...', "4 packages can be upgraded. Run 'apt list --upgradable' to see them."
镜像更新完成.....
============正在添加ROS源密钥=================
Run CMD Task:sudo apt update
-9.07s CMD Result:success em.see
Run CMD Task:sudo apt search curl
-2.42s CMD Result:success o0-0ubuntu0.20.04.1 allm64rm6464
Run CMD Task:sudo apt install curl -y
-\]\[12.67s\] CMD Result:success lled.)url arm64 7.68.0-1ubuntu2.25 \[157 kB
Run CMD Task:sudo apt search gnupg2
-2.13s CMD Result:success package)
Run CMD Task:sudo apt install gnupg2 -y
-\]\[11.95s\] CMD Result:success lled.)64 gnupg2 all 2.2.19-3ubuntu2.5 \[5,320 B
正在挑选最快的密钥服务:'https://gitee.com/fishros/rosdistro/raw/master/ros.asc', 'https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc'
https://gitee.com/fishros/rosdistro/raw/master/ros.asc 延时:0.22s
https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc 延时:0.48s
已自动选择最快密钥服务:https://gitee.com/fishros/rosdistro/raw/master/ros.asc
Run CMD Task:curl -s https://gitee.com/fishros/rosdistro/raw/master/ros.asc \| sudo apt-key add -
-1.78s CMD Result:success minal)
Run CMD Task:sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
-3.42s CMD Result:success >" 1 new signaturem --recv-keys F42ED6FBAB17C654
Run CMD Task:dpkg --print-architecture
-0.02s CMD Result:success
RUN Choose Task:请输入括号内的数字
检测到您的系统支持多个ROS镜像源,请选择您想要使用的ROS镜像源(默认清华):
1:中科大镜像源 (推荐国内用户使用)
2:清华镜像源 (容易被封禁)
3:华为镜像源
4:中山大学开源软件镜像站 (试运行)
5:ROS官方源 (国外用户或需要最新版本时使用)
0:quit
请输入\[\]内的数字以选择: