汽车通信技术正从传统CAN总线向SOME/IP和DDS演进。SOME/IP是基于IP的面向服务中间件,由宝马2011年研发,解决了CAN总线带宽不足问题,支持服务发现和远程调用,带宽达100Mbps以上。DDS则是以数据为中心的实时分发服务,具有20多种QoS策略,适合自动驾驶海量数据传输。当前趋势是SOME/IP处理简单控制指令,DDS处理传感器数据,二者在智能汽车中协同工作。
如果说 CAN 是汽车的"老式电报机",那么 SOME/IP 就是汽车进入"移动互联网时代"的标志。
1. SOME/IP 的起源:宝马的"野心"
SOME/IP 全称是 Scalable service-Oriented MiddlewarE over IP(基于 IP 的可扩展面向服务的中间件)。
-
诞生时间: 2011 年左右。
-
幕后推手: BMW(宝马)。
-
背景: 当时宝马正在研发下一代车载网络架构。随着车载娱乐系统(IVI)、摄像头辅助驾驶(ADAS)的需求激增,传统的 CAN 总线(最高 1Mbps)和 FlexRay(最高 10Mbps)已经带宽爆表。
-
标准化: 宝马开源了该协议,随后它被纳入了 AUTOSAR(汽车开放系统架构) 4.1 标准中,成为了车载以太网(Automotive Ethernet)通信的核心标准。
2. 技术背景:为什么要"推倒重建"?
为什么不能直接用 CAN?或者为什么不直接用纯 TCP/IP?
A. 从"信号"到"服务"的飞跃
传统的 CAN 总线是面向信号 (Signal-Oriented) 的。
-
逻辑: 节点 A 拼命往总线上发信号(比如"车速=60"),不管节点 B 听不听。这在传感器简单的时代很好用,但在软件定义汽车(SDV)时代,这种"广播式"通信效率太低。
-
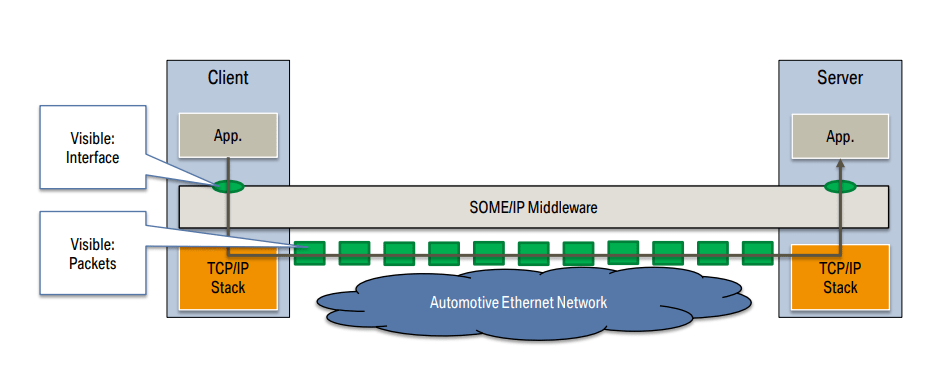
SOME/IP 逻辑: 它是面向服务 (Service-Oriented Architecture, SOA) 的。节点 B 只需要订阅"车速服务",当车速变化或 B 请求时,A 才发送。这就像从"大喇叭广播"变成了"精准的微信私聊"。
B. 车载以太网的兴起
以太网(Ethernet)进入汽车后,物理层带宽跳升到了 100Mbps 甚至 1Gbps。但是,民用的 TCP/IP 协议栈太通用了,汽车需要一套:
-
轻量级: 嵌入式芯片(如你关注的 MCU/NAD)算力有限。
-
硬实时: 刹车指令不能有延迟。
-
可扩展: 适配从简单的传感器到复杂的自动驾驶芯片。
3. SOME/IP 的核心技术特性
SOME/IP 并不是一个简单的协议,它是一整套通信机制,主要包含以下三个核心部分:
① 序列化 (Serialization)
将内存中的结构化数据(如 C 语言的 struct)转换成可以在网络上传输的二进制流。它规定了数据的排列顺序(大端字节序)、填充方式等,确保发送方的"意图"能被接收方完美还原。
② 远程过程调用 (RPC)
这让一台电脑(比如 TBox)可以像调用自己的函数一样,去调用另一台电脑(比如座舱域控制器)上的功能。
-
Request & Response: 我问你答。
-
Fire & Forget: 我发个指令(如"关窗"),你执行就行,不用回我。
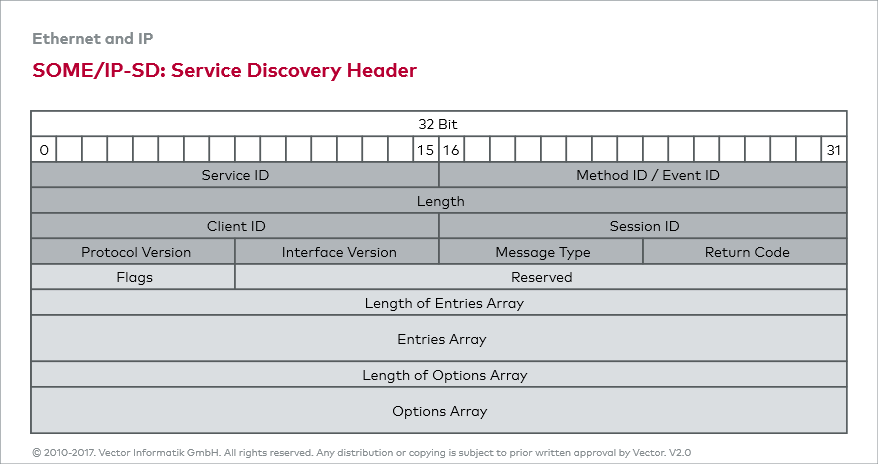
③ 服务发现 (SOME/IP-SD)
这是 SOME/IP 的灵魂。
-
在 CAN 总线里,所有的路径都是写死的。
-
在 SOME/IP 里,服务提供者会发送 "Offer Service" (我在这,我有车速数据),服务使用者会发送 "Find Service"(谁能告诉我车速?)。这实现了车载软件的"即插即用"。
4. 核心对比:SOME/IP vs. CAN
| 维度 | CAN / CAN FD | SOME/IP (车载以太网) |
|---|---|---|
| 通信模型 | 面向信号 (Signal-based) | 面向服务 (Service-oriented / SOA) |
| 带宽 | 1Mbps / 5-8Mbps | 100Mbps / 1Gbps+ |
| 有效载荷 | 8 字节 / 64 字节 | 可达 1400+ 字节(支持大包) |
| 连接方式 | 广播 (Everyone hears) | 点对点、多播、订阅 |
| 典型应用 | 车身控制、动力系统 | 自动驾驶、智能座舱、OTA 升级 |
在智能驾驶(AD)和软件定义汽车(SDV)的浪潮中,如果说 SOME/IP 是为了解决"服务调用"的问题,那么 DDS 的出现则是为了解决"数据洪流"下的超高性能交互问题。
1. DDS 的起源:从深海到星辰
DDS 全称是 Data Distribution Service(数据分发服务)。
-
诞生背景: 它最早并不是为汽车设计的。20 世纪 90 年代,美国的 RTI (Real-Time Innovations) 公司在为美国海军的复杂分布式系统提供解决方案时,开发了这种技术。
-
标准化: 2003 年,全球著名的标准组织 OMG (Object Management Group)(也是 UML、CORBA 标准的制定者)正式发布了 DDS 标准。
-
应用领域: 在进入汽车行业之前,DDS 已经广泛应用于 国防、航天、核电站、空中交通管制 等对可靠性和实时性要求近乎苛刻的领域。
2. 技术核心:从"面向服务"到"以数据为中心"
这是理解 DDS 最关键的技术背景。
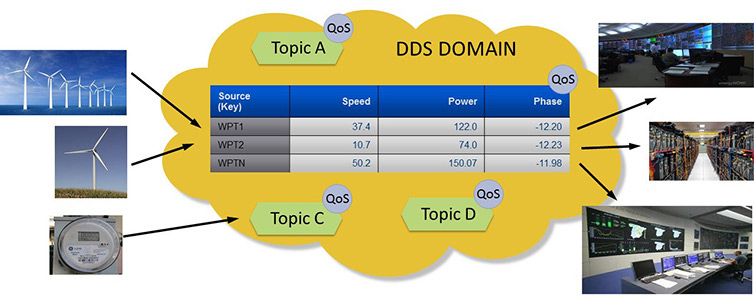
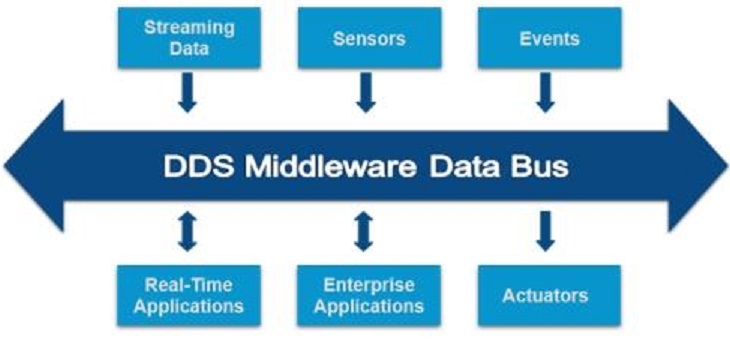
A. 什么是"以数据为中心" (Data-Centric)?
在 SOME/IP 或传统的 RPC(远程过程调用)中,重点是"过程":节点 A 调用节点 B 的一个功能。
而在 DDS 中,重点是"数据":
-
中间件(DDS)不仅负责搬运数据,它还理解数据。
-
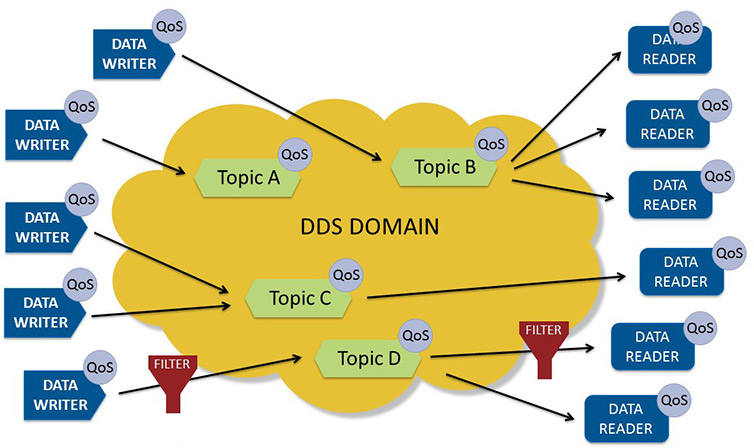
发送方(Publisher)只需把数据往"数据空间"一丢,接收方(Subscriber)声明自己需要什么样的数据,DDS 就会自动匹配并分发。
-
节点之间完全解耦: A 不知道 B 的存在,也不关心 B 的 IP 地址。
B. 杀手锏:QoS (Quality of Service) 服务质量
DDS 能够战胜其他中间件的核心武器是它拥有 20 多种 QoS 策略。通过配置这些参数,你可以精确控制数据的传输行为:
-
Reliability(可靠性): 是"必须送达"还是"尽力而为"?
-
Deadline(截止日期): 数据如果没在 10ms 内到达,就触发报警。
-
History(历史): 如果新订阅者上线,要不要把之前的 10 条旧数据补发给它?
-
Durability(持久性): 数据在发送完后,是否要在内存中保留以备后来的订阅者使用?
3. 为什么汽车行业现在疯抢 DDS?
随着自动驾驶从 L2 向 L4/L5 演进,车内通信发生了质变:
-
数据量爆炸: 激光雷达、高清摄像头的数据量以 Gbps 计。传统的以太网协议栈(TCP/IP)在处理这么大数据量时,CPU 占用率极高,而 DDS 的零拷贝(Zero-copy)等技术能极大地减轻负担。
-
安全性(Safety): 自动驾驶涉及生命安全。DDS 的强实时性和确定性(Determinism)符合 ISO 26262 道路车辆功能安全标准。
-
ROS2 的推动: 机器人开发系统 ROS2 默认使用 DDS 作为底层通信中间件。由于很多自动驾驶原型车是基于 ROS2 开发的,这直接把 DDS 带进了量产车领域。
4. 深度对比:DDS vs. SOME/IP
| 特性 | SOME/IP | DDS |
|---|---|---|
| 通信模型 | 面向服务 (SOA),Client-Server | 以数据为中心 (Data-Centric),Pub-Sub |
| 耦合度 | 弱耦合(需要服务发现) | 极低耦合(完全通过 Topic 匹配) |
| 实时性 | 较好(依赖 TCP/UDP) | 极强(支持硬实时配置) |
| 灵活性 | 较低,逻辑相对固定 | 极高,通过 20+ QoS 动态调整 |
| 资源消耗 | 较轻量,适合 MCU/NAD | 较重(协议栈复杂),更适合高算力 SoC |
| 典型场景 | 车身控制、IVI 娱乐系统、诊断 | 自动驾驶感知融合、规划控制 |
5. 行业现状:两者的"合流"
现在的趋势并不是"谁取代谁",而是 "SOME/IP + DDS" 共存:
-
SOME/IP 负责简单的、逻辑清晰的跨域控制(如 TBox 远程控制、网关指令)。
-
DDS 负责自动驾驶域内(智驾大脑内部)海量传感器数据的分发。
-
AUTOSAR CP 依然统治着动力底盘(CAN 为主),而 AUTOSAR AP 则同时支持 SOME/IP 和 DDS。