玩转智能小车或者机器人,少不了要接触ROS2操作系统。准确来说ROS2不是一个操作系统,而是一个基于Ubuntu操作系统之上的中间件框架。
1、ROS2安装前的准备
确认系统支持版本,ROS2 Humble Hawksbill支持Ubuntu 22.04 Jammy Jellyfish;ROS2 jazzy Kilted支持 Ubuntu24.04,选择对应的系统安装即可。
2、ROS2安装
这里选择小鱼儿一键安装脚本,快速便捷。
打开ubuntu终端,输入:
wget http://fishros.com/install -O fishros && . fishros然后会出现以下界面:
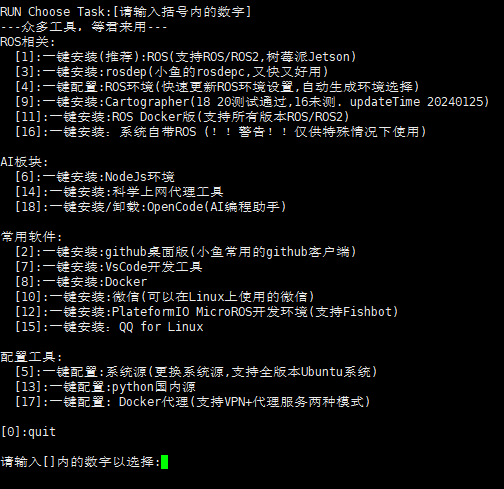
第一次安装时,先选择输入数字5,及13,一键配置系统源为 国内清华或者中科大的。
配置完成后,再执行上面的命令,出现上面菜单,输入数字1,选择ROS2 某个版本,Kilted是最新的稳定版,rolling是开发版本,等待完成安装。
3、测试安装结果
运行示例程序验证安装:
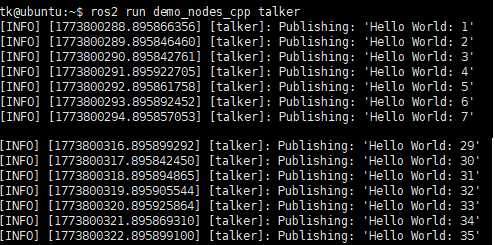
ros2 run demo_nodes_cpp talker新建终端运行监听节点:
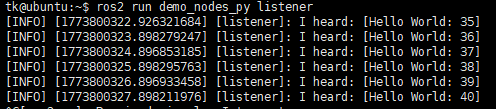
ros2 run demo_nodes_py listener两个终端分别出现下面的窗口,即表示完成了正常的通信。