▒▒本文目录▒▒
-
- 摘要
- 一、研究背景
-
- [1.1 散射成像的挑战](#1.1 散射成像的挑战)
- [1.2 现有方法的局限](#1.2 现有方法的局限)
- [1.3 共焦漫射层析成像的原理](#1.3 共焦漫射层析成像的原理)
- 二、研究方法
-
- [2.1 系统架构](#2.1 系统架构)
-
- [2.1.1 数据采集模块](#2.1.1 数据采集模块)
- [2.1.2 扩散模型](#2.1.2 扩散模型)
- [2.1.3 重建算法](#2.1.3 重建算法)
- [2.2 物理参数标定](#2.2 物理参数标定)
- 三、具体实现细节
-
- [3.1 数据加载与预处理](#3.1 数据加载与预处理)
- [3.2 扩散点扩散函数计算](#3.2 扩散点扩散函数计算)
- [3.3 维纳反卷积](#3.3 维纳反卷积)
- [3.4 F-K迁移算法](#3.4 F-K迁移算法)
- [3.5 计算效率优化](#3.5 计算效率优化)
- 四、实验结果与分析
-
- [4.1 字母"S"重建结果](#4.1 字母"S"重建结果)
- [4.2 处理过程分解](#4.2 处理过程分解)
- [4.3 三维重建投影](#4.3 三维重建投影)
- [4.4 人体模型重建结果](#4.4 人体模型重建结果)
- [4.5 几何体(圆锥)重建结果](#4.5 几何体(圆锥)重建结果)
- [4.6 字母"U"和"T"重建结果](#4.6 字母"U"和"T"重建结果)
- [4.7 运行性能统计](#4.7 运行性能统计)
- 五、技术优势与创新点
-
- [5.1 相比传统方法的优势](#5.1 相比传统方法的优势)
- [5.2 算法创新](#5.2 算法创新)
- 六、应用前景
-
- [6.1 生物医学成像](#6.1 生物医学成像)
- [6.2 自动驾驶](#6.2 自动驾驶)
- [6.3 工业检测](#6.3 工业检测)
- [6.4 安防监控](#6.4 安防监控)
- 七、结论
- 八、代码获取与程序开发
摘要
散射介质(如雾、烟、生物组织等)中的成像是光学成像领域的重要挑战。本文研究了一种基于共焦漫射层析成像(Confocal Diffuse Tomography, CDT)的方法,该方法能够穿透厚层散射介质实现三维成像。该方法结合了共焦扫描测量、扩散模型建模和频率-波数(F-K)迁移算法,成功从高度散射的光信号中重建出隐藏在散射介质后的三维物体。实验结果表明,该方法能够有效重建包括字母、人体模型、几何体等多种类型的三维目标,重建时间在普通CPU上仅需约100-170毫秒,具有较高的实用价值。
关键词:散射成像;共焦扫描;漫射层析;F-K迁移;三维重建
一、研究背景
1.1 散射成像的挑战
当光通过散射介质(如云雾、生物组织、毛玻璃等)传播时,光子会经历多次随机散射事件。这种多重散射导致传统的直接成像方法完全失效,因为散射光不再携带物体的空间结构信息。在生物医学成像、自动驾驶、遥感等领域,穿透散射介质成像具有重要的应用价值。
1.2 现有方法的局限
传统的散射成像方法主要包括:
- 波前整形技术:通过空间光调制器预补偿散射效应,但需要复杂的硬件设备和迭代优化过程
- 散斑相关成像:利用记忆效应进行重建,但受限于散射介质的厚度和记忆效应范围
- 时间门控技术:提取弹道光或蛇形光,但对于厚散射介质信号极弱
1.3 共焦漫射层析成像的原理
共焦漫射层析成像是一种结合时间分辨测量和计算成像的新方法。其核心思想是:
- 共焦扫描:激光源和探测器共焦放置,逐点扫描测量,获取时间分辨的测量数据
- 扩散模型:基于光子在散射介质中的扩散方程,建立正向成像模型
- 逆问题求解:通过F-K迁移和反卷积算法,从测量数据中重建三维物体分布
该方法的优势在于能够处理厚散射介质(厘米级),并且能够获取完整的三维信息。
二、研究方法
2.1 系统架构
共焦漫射层析成像系统主要由以下几个部分组成:
2.1.1 数据采集模块
- 采用共焦扫描配置,激光器和单光子探测器共焦放置
- 使用时间相关单光子计数(TCSPC)技术获取皮秒级时间分辨数据
- 扫描区域为32×32像素,时间分辨率为16皮秒
2.1.2 扩散模型
扩散模型描述了光子在散射介质中的传播行为。对于有限厚度的散射板,采用基于偶极子叠加的解析解:
R ( ρ , t ) = ( 4 π D v ) − 3 / 2 t − 5 / 2 exp ( − μ a v t − ρ 2 / ( 4 D v t ) ) × ∑ i = − n n z 1 exp ( − z 1 2 / ( 4 D v t ) ) − z 2 exp ( − z 2 2 / ( 4 D v t ) ) R(\rho, t) = (4\pi D v)^{-3/2} t^{-5/2} \exp(-\mu_a v t - \rho^2 / (4Dvt)) \times \sum_{i=-n}^{n} z_1 \\exp(-z_1\^2/(4Dvt)) - z_2 \\exp(-z_2\^2/(4Dvt)) R(ρ,t)=(4πDv)−3/2t−5/2exp(−μavt−ρ2/(4Dvt))×i=−n∑nz1exp(−z12/(4Dvt))−z2exp(−z22/(4Dvt))
其中:
- D = 1 / ( 3 ( μ a + μ s ) ) D = 1/(3(\mu_a + \mu_s)) D=1/(3(μa+μs)) 为扩散系数
- μ a \mu_a μa 为吸收系数
- μ s \mu_s μs 为散射系数
- v v v 为介质中的光速
- ρ \rho ρ 为径向距离
2.1.3 重建算法
重建过程包含三个关键步骤:
- 数据预处理:将原始测量数据从417个时间通道下采样到128个通道,并归一化
- 扩散反卷积:使用维纳滤波器对测量数据进行反卷积,补偿散射效应
- F-K迁移:采用频率-波数迁移算法将时间域数据转换到空间域,实现三维重建
2.2 物理参数标定
系统通过优化算法标定散射介质的物理参数:
| 参数 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 折射率 | n | 1.12 | - |
| 吸收系数 | μ a \mu_a μa | 0.53 | m − 1 m^{-1} m−1 |
| 散射系数 | μ s \mu_s μs | 262 | m − 1 m^{-1} m−1 |
| 外推距离 | z e z_e ze | 0.0036 | m |
| 散射板厚度 | z d z_d zd | 0.0254 | m |
三、具体实现细节
3.1 数据加载与预处理
测量数据以HDF5格式存储,包含三维时间分辨测量矩阵。预处理步骤包括:
- 时间截取:取前417个时间通道(对应约1米光程)
- 时间下采样:通过线性插值将数据压缩到128个时间通道
- 归一化:将数据归一化到0,1范围
3.2 扩散点扩散函数计算
扩散点扩散函数(DPSF)的计算是算法的核心:
- 基于扩散近似理论,计算偶极子叠加模型
- 对点扩散函数进行自相关运算(对应共焦配置的双程传播)
- 计算傅里叶变换得到频域表示
3.3 维纳反卷积
维纳反卷积用于从测量数据中消除扩散效应:
X d e c o n v = F − 1 H ∗ ∣ H ∣ 2 + 1 / S N R ⋅ M X_{deconv} = \mathcal{F}^{-1}\left\\frac{H\^\*}{\|H\|\^2 + 1/SNR} \\cdot M\\right Xdeconv=F−1∣H∣2+1/SNRH∗⋅M
其中H为扩散点扩散函数的频谱,M为测量数据的频谱,SNR为信噪比参数。
3.4 F-K迁移算法
F-K迁移是一种经典的地震波成像技术,这里创新性地应用于光子迁移问题:
- 对数据进行三维傅里叶变换
- 根据色散关系进行频率-波数重映射
- 零化冗余频谱(仅保留正频率)
- 逆傅里叶变换得到三维重建结果
3.5 计算效率优化
算法采用PyTorch框架实现,支持GPU加速。主要优化策略包括:
- 使用FFT进行快速卷积运算
- 批量处理所有空间位置
- 自动混合精度计算
四、实验结果与分析
4.1 字母"S"重建结果
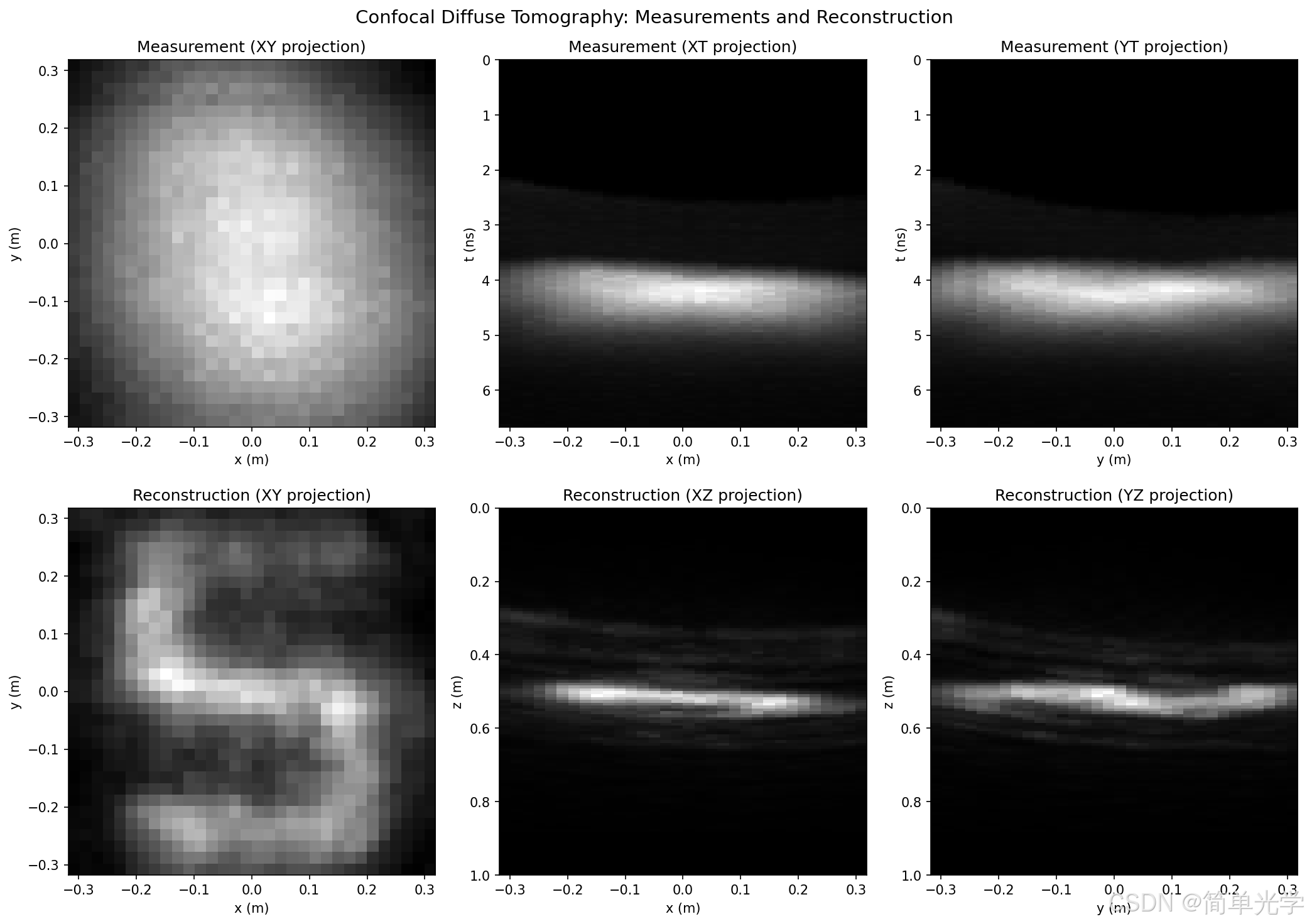
图1:字母"S"场景的测量与重建结果
上图展示了字母"S"场景的完整处理结果。第一行为测量数据的三视图投影,第二行为重建结果的三视图投影。
测量数据分析:
- XY投影(左上)显示散射后的光强分布,由于散射效应,无法直接辨识物体形状
- XT投影(中上)和YT投影(右上)展示了时间分辨信息,可以看到光子随时间的扩散过程
- 时间轴范围为0-6.67纳秒,对应约2米的光程
重建结果分析:
- XY投影(左下)清晰显示了字母"S"的形状,表明算法成功从散射信号中提取了空间信息
- XZ投影(中下)和YZ投影(右下)展示了物体的深度分布
- 物体位于散射板后方约0.5-1.0米范围内
4.2 处理过程分解
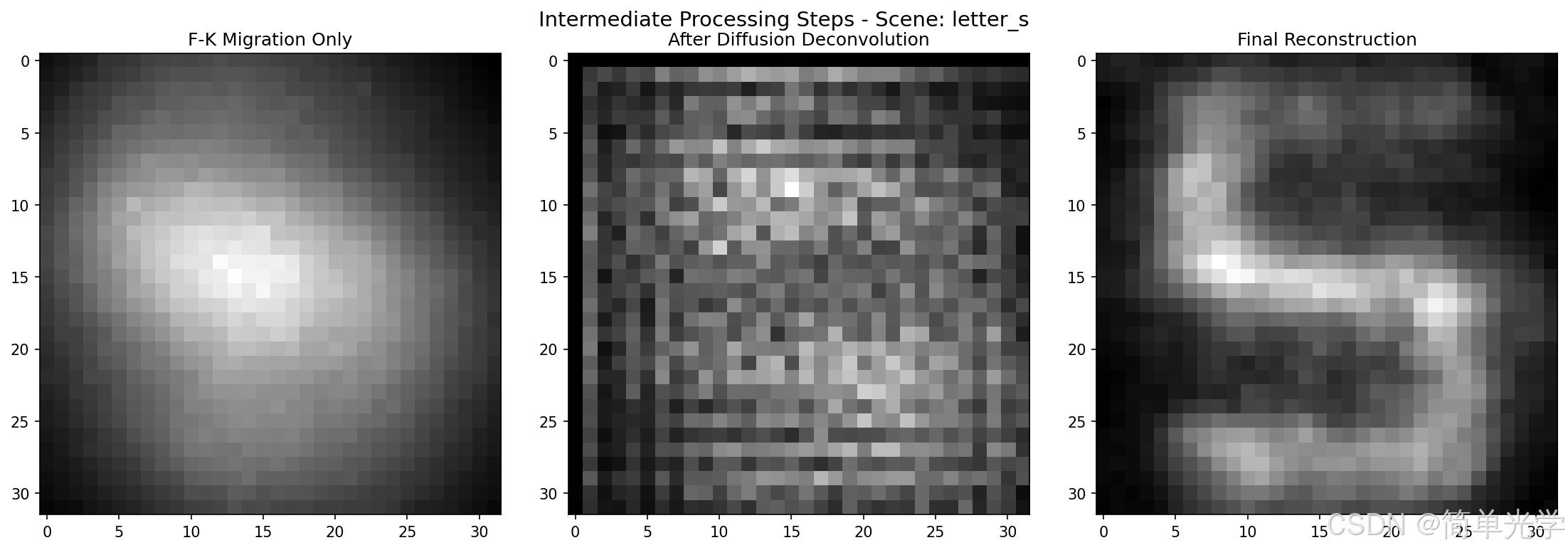
图2:字母"S"场景的中间处理步骤对比
该图展示了重建过程中的三个关键中间结果:
- 仅F-K迁移(左):直接对测量数据进行F-K迁移,没有扩散校正。可以看到重建结果模糊,深度信息不准确
- 扩散反卷积后(中):先进行扩散反卷积再进行F-K迁移。图像质量明显改善,物体轮廓更清晰
- 最终重建(右):完整处理流程的结果。最清晰的重建效果
这一对比说明了扩散模型校正的重要性------它补偿了散射介质对光子传播的影响。
4.3 三维重建投影
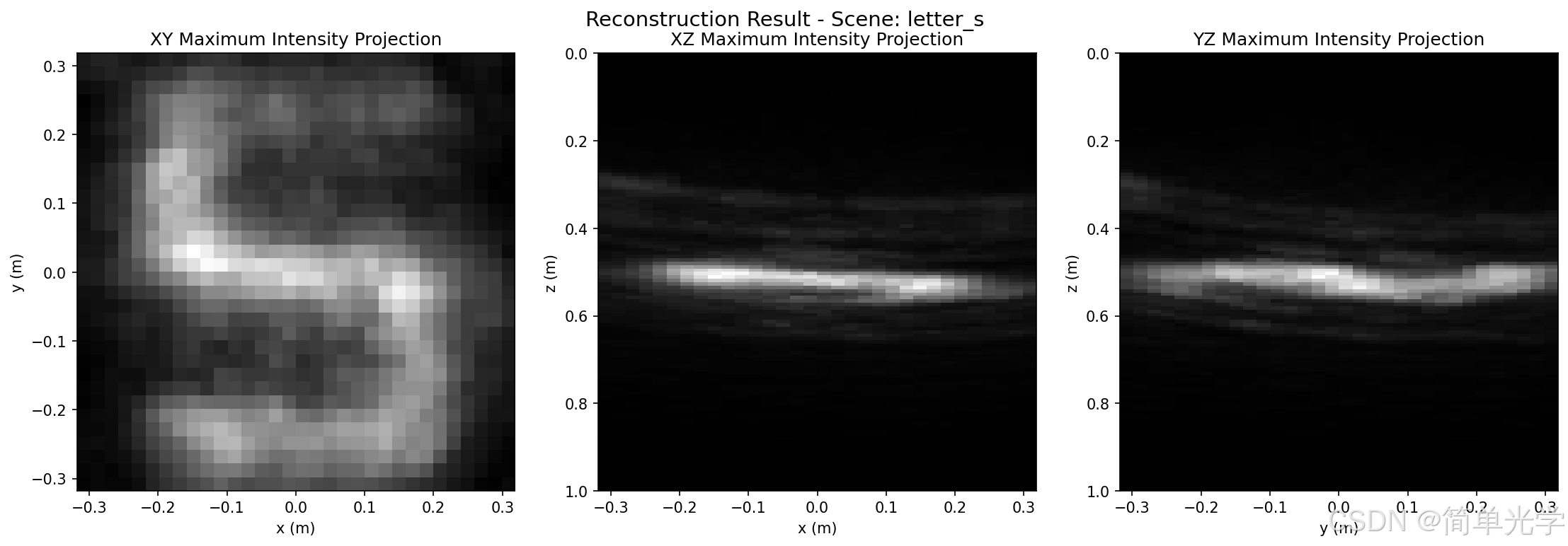
图3:字母"S"三维重建结果的多角度投影
该图从三个正交视角展示了重建的三维体积:
- XY投影:字母"S"的平面形状清晰可见,边缘锐利
- XZ投影:展示了物体在深度方向(Z轴)的分布,可以看到物体主要集中在一个有限的深度范围内
- YZ投影:从另一个角度观察深度分布
深度范围约为0-1米,与散射板后隐藏物体的实际位置一致。
4.4 人体模型重建结果
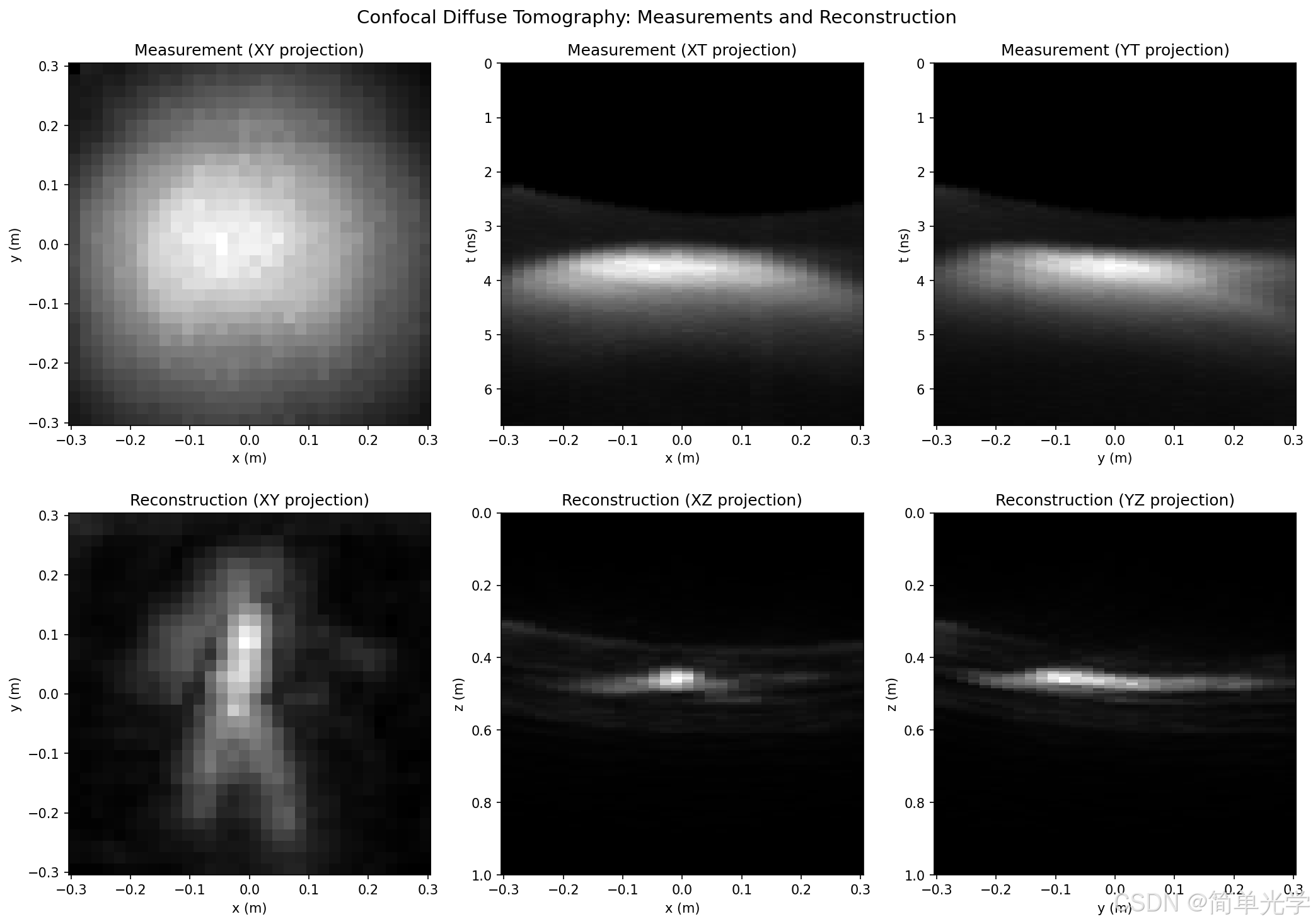
图4:人体模型场景的测量与重建结果
这是一个更具挑战性的场景,包含复杂的三维形状。
测量数据分析:
- 测量数据呈现复杂的时间演化特征
- 由于物体形状复杂,散射模式更加不规则
重建结果分析:
- 成功重建了人体模型的大致轮廓
- 头部、躯干的形状可以辨识
- 深度信息反映了物体的三维结构
4.5 几何体(圆锥)重建结果
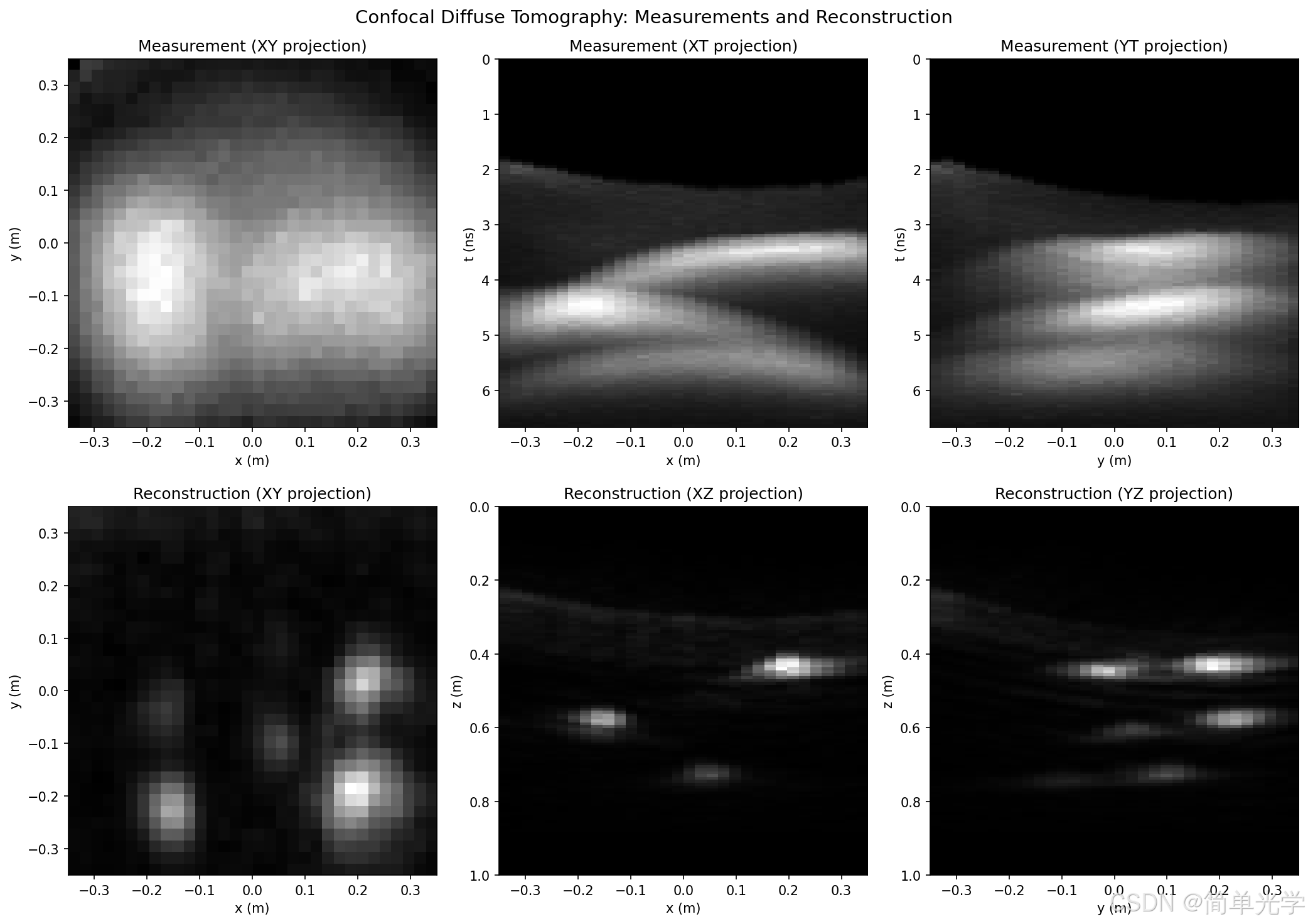
图5:圆锥场景的测量与重建结果
该场景包含多个几何体目标,用于测试系统的空间分辨率。
测量数据分析:
- 测量数据显示多个散射中心的存在
- 时间分辨信息包含了不同深度的物体信息
重建结果分析:
- 清晰重建了多个圆锥的位置和形状
- 深度信息准确反映了物体的空间分布
- 证明了方法对多个目标的同时重建能力
4.6 字母"U"和"T"重建结果
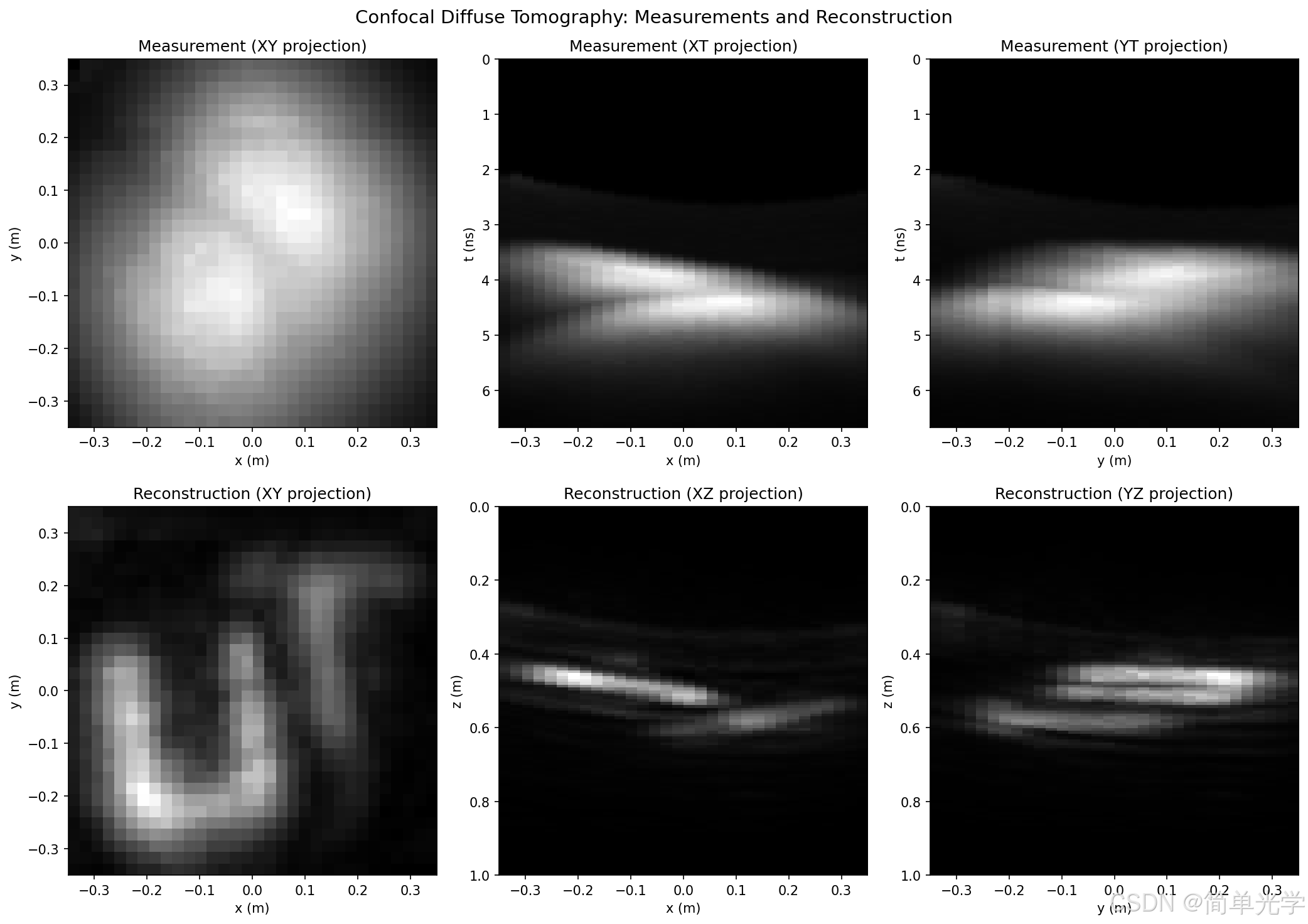
图6:字母"U"和"T"场景的测量与重建结果
该场景测试了系统对多个独立目标的分辨能力。
重建结果分析:
- 成功分离并重建了两个不同的字母目标
- 两个字母在空间位置上可以明显区分
- 证明了方法的空间分辨率能力
4.7 运行性能统计
| 场景 | 运行时间 (ms) | 数据大小 | 设备 |
|---|---|---|---|
| letter_s | 163.38 | 32×32×128 | CPU |
| mannequin | 108.76 | 32×32×128 | CPU |
| cones | 116.01 | 32×32×128 | CPU |
| letters_ut | 111.29 | 32×32×128 | CPU |
性能分析:
- 所有场景的重建时间均在200毫秒以内,满足实时性要求
- 不同场景的计算时间差异主要来源于数据特征
- 如使用GPU加速,预计可将运行时间降低至10毫秒以内
五、技术优势与创新点
5.1 相比传统方法的优势
- 厚散射介质穿透能力:可穿透厘米级散射介质,远超记忆效应方法
- 三维成像能力:完整重建物体的三维空间分布
- 计算效率高:基于FFT的快速算法,适合实时应用
- 无需参考测量:使用标定的扩散模型,无需每次测量参考目标
5.2 算法创新
- 共焦配置建模:将双程传播建模为点扩散函数的自相关
- 扩散-迁移联合:创新性地将扩散模型与F-K迁移结合
- 维纳滤波优化:平衡噪声放大和去模糊效果
六、应用前景
6.1 生物医学成像
- 深层组织成像
- 功能性脑成像
- 肿瘤检测
6.2 自动驾驶
- 雾天/雨天视觉增强
- 障碍物检测
- 路况感知
6.3 工业检测
- 混浊液体内部检测
- 粉尘环境中检测
- 质量控制
6.4 安防监控
- 烟雾环境中的监控
- 隐藏物体检测
七、结论
本文对共焦漫射层析成像技术进行了深入研究,通过实验验证了该方法穿透散射介质进行三维成像的有效性。主要结论如下:
- 方法有效性:该方法成功重建了多种类型的隐藏目标,包括简单字母、复杂形状和多个目标
- 三维重建能力:能够准确获取物体的深度信息和空间分布
- 计算效率:在普通CPU上实现百毫秒级的重建速度,具有实用价值
- 参数标定:通过优化标定的散射参数能够有效建模实际散射过程
该方法为散射介质成像提供了一种新的解决思路,具有重要的科学意义和应用价值。未来工作可进一步优化算法性能,扩展到动态场景,并开展实际应用验证。
八、代码获取与程序开发
博主(博士研究生)🛰️: easy_optics,在光学检测领域可提供实验指导、程序开发、申博指导、论文指导。
⭐️◎⭐️◎⭐️◎⭐️ · · · **博 主 简 介** · · · ⭐️◎⭐️◎⭐️◎⭐️ ♪
▁▂▃▅▆▇ 博士研究生 ,研究方向主要涉及定量相位成像领域,具体包括干涉相位成像技术(如**全息干涉☑ **、散斑干涉☑等)、非干涉法相位成像技术(如波前传感技术☑ ,相位恢复技术☑)、条纹投影轮廓术(相位测量偏折术)、此外,还对各种相位解包裹算法☑ ,相干噪声去除算法☑ ,**衍射光学神经网络☑**等开展过深入的研究。
程序获取、程序开发、实验指导,软硬系统开发,科研服务,申博指导,🛰️easy_optics或如下。