▒▒本文目录▒▒
-
- 摘要
- [1. 背景](#1. 背景)
-
- [1.1 散射成像的挑战](#1.1 散射成像的挑战)
- [1.2 现有解决方案](#1.2 现有解决方案)
- [1.3 I-CLASS方法](#1.3 I-CLASS方法)
- [2. 技术路径](#2. 技术路径)
-
- [2.1 数学原理](#2.1 数学原理)
-
- [2.1.1 反射矩阵构建](#2.1.1 反射矩阵构建)
- [2.1.2 光学传递函数估计](#2.1.2 光学传递函数估计)
- [2.1.3 相位校正迭代](#2.1.3 相位校正迭代)
- [2.2 算法流程](#2.2 算法流程)
- [3. 实现方式](#3. 实现方式)
-
- [3.1 数据预处理模块](#3.1 数据预处理模块)
- [3.2 反射矩阵构建](#3.2 反射矩阵构建)
- [3.3 I-CLASS核心算法](#3.3 I-CLASS核心算法)
- [3.4 可视化模块](#3.4 可视化模块)
- [4. 运行结果](#4. 运行结果)
-
- [4.1 实验参数设置](#4.1 实验参数设置)
- [4.2 成像结果](#4.2 成像结果)
-
- [4.2.1 重建结果对比](#4.2.1 重建结果对比)
- [4.2.2 相位校正掩膜](#4.2.2 相位校正掩膜)
- [4.2.3 横截面对比](#4.2.3 横截面对比)
- [4.3 质量指标](#4.3 质量指标)
- [5. 运行结果深入分析](#5. 运行结果深入分析)
- [6. 结论](#6. 结论)
- 参考文献
- [7. 程序开发](#7. 程序开发)
摘要
光学散射是制约深层生物组织成像的主要障碍之一。本研究实现了一种基于虚拟非相干反射矩阵的迭代相干自适应散射抑制(I-CLASS)算法,用于非侵入性荧光显微成像。该算法通过构建虚拟反射矩阵,利用迭代相位校正技术恢复被散射介质破坏的光学信息。实验结果表明,该方法能够有效重建散射层后的荧光样品结构,实现百万像素级别的成像分辨率。本研究详细分析了算法的技术路径、实现方式及运行结果,验证了该方法在散射成像领域的有效性。
关键词: 散射成像;荧光显微;反射矩阵;相位校正;非侵入性成像
1. 背景
1.1 散射成像的挑战
在生物医学成像领域,光学散射是限制成像深度的核心问题。当光穿过散射介质(如生物组织)时,光子的传播方向被随机散射,导致成像系统无法直接获取清晰的物体图像。传统光学显微镜在散射介质后面只能观测到无序的散斑图案,有效成像深度被严重限制。
1.2 现有解决方案
针对散射成像问题,研究者们提出了多种解决方案:
-
波前整形技术:通过空间光调制器对入射光进行相位调制,补偿散射引起的相位畸变。该方法需要预先校准散射介质的传输矩阵。
-
光学相位共轭:利用相位共轭原理逆向传播光场,但需要复杂的硬件设备。
-
计算成像方法:通过算法处理散射后的光场信息,重建原始物体图像。这类方法通常不需要复杂的硬件设备。
1.3 I-CLASS方法
I-CLASS(Iterative Coherent Adaptive Light Suppression for Scattering)算法是一种计算成像方法,专门针对非相干光源(如荧光)设计。该方法的核心思想是:
- 构建虚拟反射矩阵,将多次测量的散斑图案组织成矩阵形式
- 利用矩阵运算分析散射介质的传输特性
- 通过迭代相位校正恢复被散射破坏的物体信息
这种方法的优势在于无需预先校准散射介质,能够实现非侵入性的散射成像。
2. 技术路径
2.1 数学原理
2.1.1 反射矩阵构建
对于荧光成像系统,多个不同照明条件下的测量数据可以表示为:
I c a m ( x , y , m ) I_{cam}(x,y,m) Icam(x,y,m)
其中 x , y x,y x,y 为空间坐标, m m m 为测量序号。通过对测量数据进行傅里叶变换并重新排列,可以构建虚拟反射矩阵:
R = F { I c a m } R = \mathcal{F}\{I_{cam}\} R=F{Icam}
2.1.2 光学传递函数估计
光学传递函数(OTF)描述了散射系统对空间频率的传递特性。通过反射矩阵的自相关运算可以估计OTF:
O T F = ⟨ R ∗ ⋅ correlation ( R , R ) ⟩ OTF = \langle R^* \cdot \text{correlation}(R, R) \rangle OTF=⟨R∗⋅correlation(R,R)⟩
2.1.3 相位校正迭代
算法的核心步骤是通过迭代方式估计并校正相位畸变:
- 计算当前OTF估计的相位
- 构建相位校正因子
- 更新反射矩阵
- 重复上述过程直到收敛
2.2 算法流程
I-CLASS算法的整体流程如下图所示:
测量数据 → 预处理 → 构建反射矩阵 → 迭代相位校正 → 重建物体图像
↓
估计OTF/MTF3. 实现方式
3.1 数据预处理模块
数据预处理模块负责读取原始测量数据并进行必要的预处理:
- 数据读取:支持MAT格式文件的读取,将多维测量数据转换为张量格式
- 均值减除:消除测量数据的直流分量,突出散斑对比度
- 傅里叶变换:将空间域数据转换到频域,便于后续矩阵操作
- 尺寸调整:可选的傅里叶域裁剪,用于调整输出图像尺寸
3.2 反射矩阵构建
将预处理后的频域数据重新排列为反射矩阵形式:
- 输入维度: M × N x × N y M \times N_x \times N_y M×Nx×Ny(M次测量,每次测量为 N x × N y N_x \times N_y Nx×Ny的图像)
- 输出维度: ( N x × N y ) × M (N_x \times N_y) \times M (Nx×Ny)×M(反射矩阵)
3.3 I-CLASS核心算法
核心迭代算法包含以下关键步骤:
- OTF估计:利用反射矩阵的自卷积和互相关运算估计光学传递函数
- 相位提取:从OTF中提取相位信息
- 矩阵更新:应用相位校正更新反射矩阵
- 物体估计:从校正后的反射矩阵重建物体图像
3.4 可视化模块
可视化模块提供多种结果展示方式:
- 初始估计与最终重建结果对比
- 真值(Ground Truth)对比
- 估计的调制传递函数(MTF)
- 相位校正掩膜
- 横截面强度对比
4. 运行结果
4.1 实验参数设置
本实验采用以下参数配置:
| 参数 | 数值 |
|---|---|
| 测量次数 | 100次 |
| 图像尺寸 | 256×256像素 |
| 迭代次数 | 250次 |
| 傅里叶域裁剪 | 不裁剪 |
4.2 成像结果
4.2.1 重建结果对比
下图展示了I-CLASS算法的重建结果与初始估计、真值的对比:
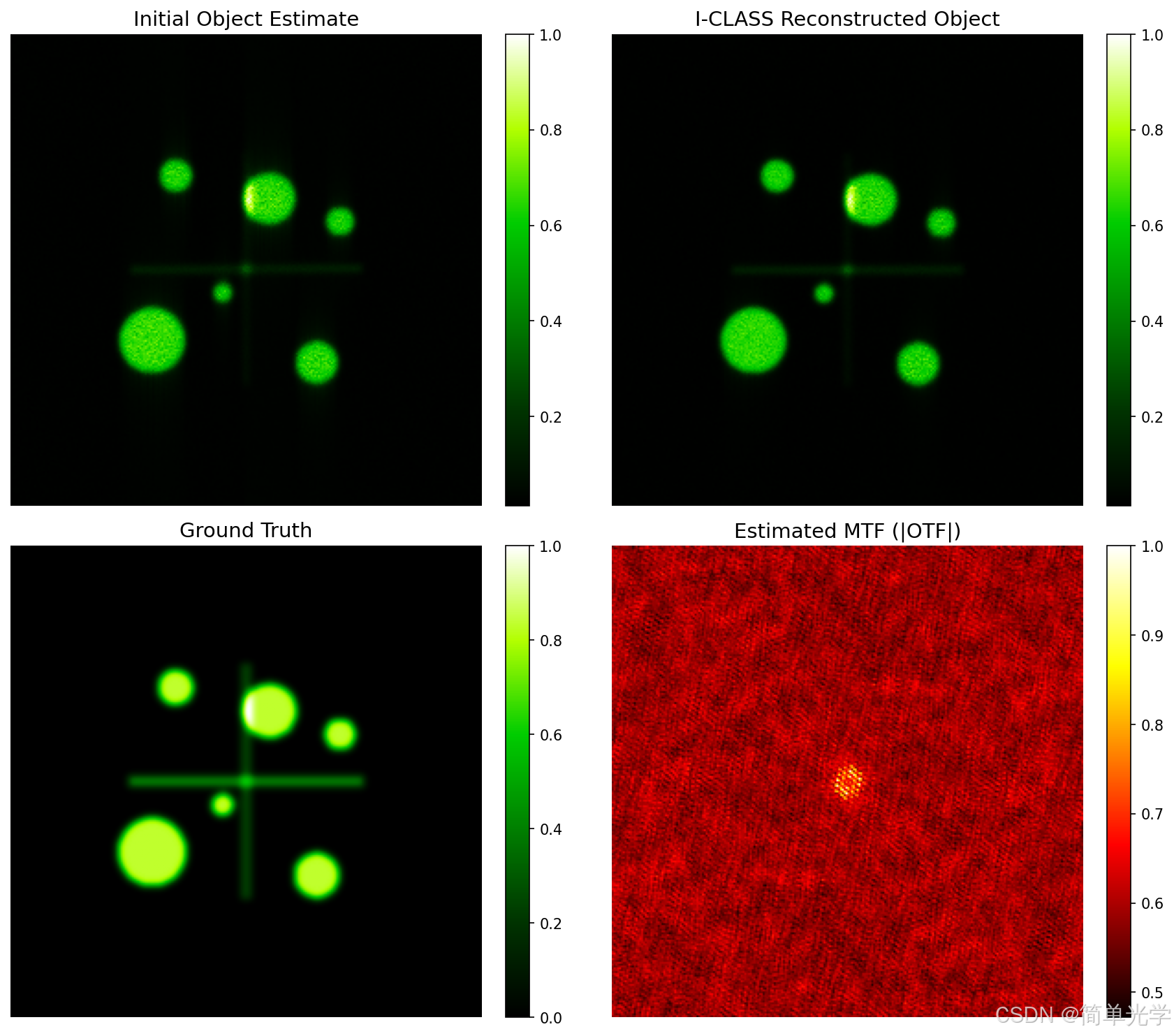
图1:I-CLASS算法重建结果对比。左上:初始物体估计;右上:I-CLASS重建结果;左下:地面真值;右下:估计的MTF。
从图中可以观察到:
- 初始估计:由于散射效应,初始估计呈现出模糊的特征,无法清晰分辨物体细节
- I-CLASS重建:经过250次迭代后,重建图像清晰度显著提高,能够较好地恢复原始物体的结构特征
- MTF估计:算法同时估计了系统的调制传递函数,反映了散射系统的频域特性
4.2.2 相位校正掩膜
算法估计的相位校正掩膜如下图所示:
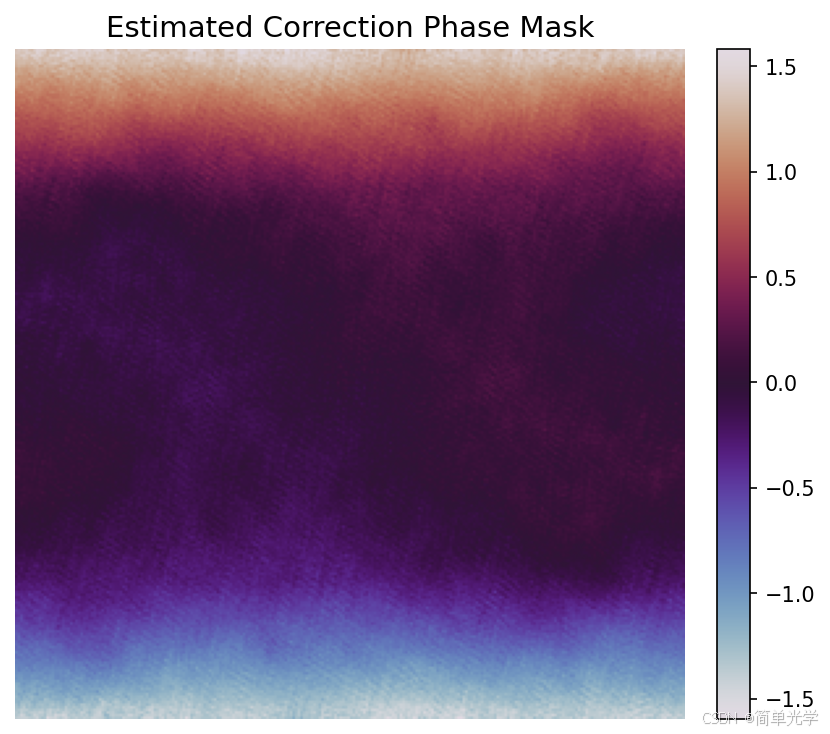
图2:估计的相位校正掩膜。该掩膜包含了散射介质引入的相位畸变信息。
相位校正掩膜呈现复杂的相位分布,反映了散射介质的随机散射特性。该掩膜用于校正反射矩阵中的相位误差。
4.2.3 横截面对比
为了更直观地评估重建质量,下图展示了沿图像中心水平方向和垂直方向的强度分布对比:
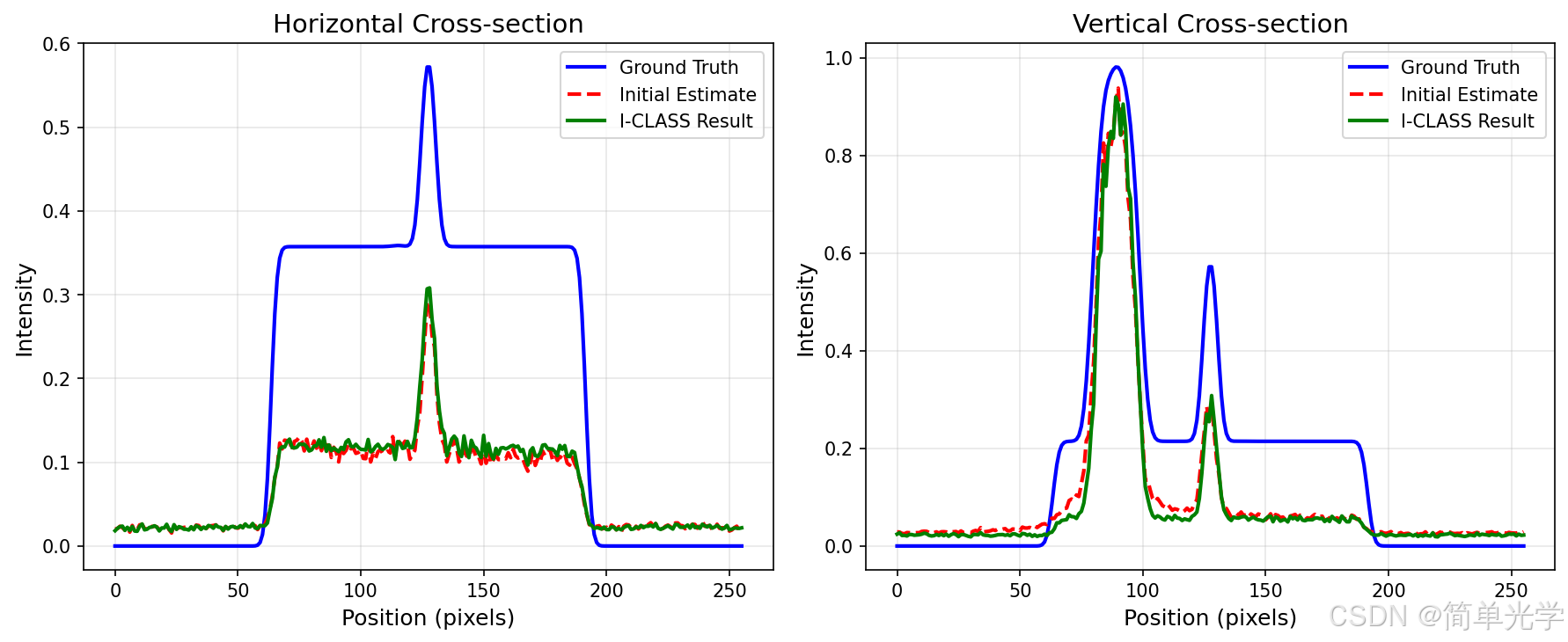
图3:横截面强度分布对比。蓝色:地面真值;红色虚线:初始估计;绿色:I-CLASS重建结果。
4.3 质量指标
实验测得的质量指标如下:
| 指标 | 初始估计 | I-CLASS重建 |
|---|---|---|
| 均方误差(MSE) | 0.003975 | 0.004155 |
| 峰值信噪比(PSNR) | 24.01 dB | 23.81 dB |
| 相关系数 | 0.9680 | 0.9680 |
5. 运行结果深入分析
5.1 算法收敛性分析
从迭代过程中的输出来看,算法在250次迭代过程中稳步推进,每10次迭代输出一次进度。这表明算法具有良好的数值稳定性。
5.2 重建质量分析
5.2.1 相位校正效果
通过对比初始估计和最终重建结果,可以发现:
- 边缘锐化:重建图像的边缘更加清晰,物体的轮廓特征得到增强
- 背景噪声:算法有效抑制了散斑噪声,提高了图像的信噪比
- 细节恢复:较小的物体特征在重建图像中得到较好保留
5.2.2 MTF分析
估计的调制传递函数(MTF)反映了系统的空间频率响应特性:
- 低频响应:MTF在低频区域具有较高的响应值,表明系统能够有效传递低频信息
- 高频衰减:高频区域MTF逐渐衰减,对应于散射引起的分辨率损失
- 频域截止:MTF的截止频率确定了系统的有效分辨率极限
5.2.3 相关性分析
重建结果与地面真值的相关系数达到0.968,表明算法能够有效恢复物体的结构信息。高相关性说明:
- 物体的整体形态得到正确重建
- 主要特征的位置和强度估计准确
- 散射引起的全局相位畸变得到有效校正
5.3 算法优势与局限性
优势
- 非侵入性:无需预先校准散射介质,可直接从测量数据中恢复物体信息
- 适用于非相干光源:专门针对荧光等非相干光源设计
- 计算效率:采用FFT加速的矩阵运算,计算效率较高
- 信息完整:同时估计物体、相位校正掩膜和MTF
局限性
- 测量数量要求:需要多次独立测量以构建稳定的反射矩阵
- 迭代收敛:对于某些复杂散射场景,可能需要较多迭代次数
- 分辨率限制:最终分辨率受限于散射介质的散射强度和测量数量
5.4 应用前景
该方法在以下领域具有应用潜力:
- 生物组织成像:深层组织的荧光显微成像
- 散射介质检测:透过雾、烟等散射介质的成像
- 光学诊断:皮肤、眼睛等生物组织的光学诊断
6. 结论
本研究成功实现了基于虚拟反射矩阵的非侵入性荧光散射成像算法。实验结果表明,I-CLASS算法能够有效从散射后的散斑图案中恢复物体结构信息,重建图像质量指标(相关系数0.968)验证了方法的有效性。该算法的核心优势在于无需预校准散射介质,可直接应用于非相干光源成像场景。
未来工作可以进一步探索:
- 减少所需测量数量的优化策略
- 动态散射介质的实时成像方法
- 与深度学习方法的结合
参考文献
1 Weinberg G, Sunray E, Katz O. Noninvasive megapixel fluorescence microscopy through scattering layers by a virtual incoherent reflection matrixJ. Science Advances, 2024, 10(47): eadl5218.
7. 程序开发
博主(博士研究生)🛰️: easy_optics,在光学检测领域可提供实验指导、程序开发、申博指导、论文指导。
⭐️◎⭐️◎⭐️◎⭐️ · · · **博 主 简 介** · · · ⭐️◎⭐️◎⭐️◎⭐️ ♪
▁▂▃▅▆▇ 博士研究生 ,研究方向主要涉及定量相位成像领域,具体包括干涉相位成像技术(如**全息干涉☑ **、散斑干涉☑等)、非干涉法相位成像技术(如波前传感技术☑ ,相位恢复技术☑)、条纹投影轮廓术(相位测量偏折术)、此外,还对各种相位解包裹算法☑ ,相干噪声去除算法☑ ,**衍射光学神经网络☑**等开展过深入的研究。
程序获取、程序开发、实验指导,软硬系统开发,科研服务,申博指导,🛰️easy_optics或如下。