Controller Area Network,控制器局域⽹,是国际上应⽤最⼴泛的现场总线之⼀。
20世纪80年代初德国Bosch公司为解决现代汽⻋中众多控制单元、测试仪器之间的实时数据交换⽽开发的⼀种串⾏通信协议
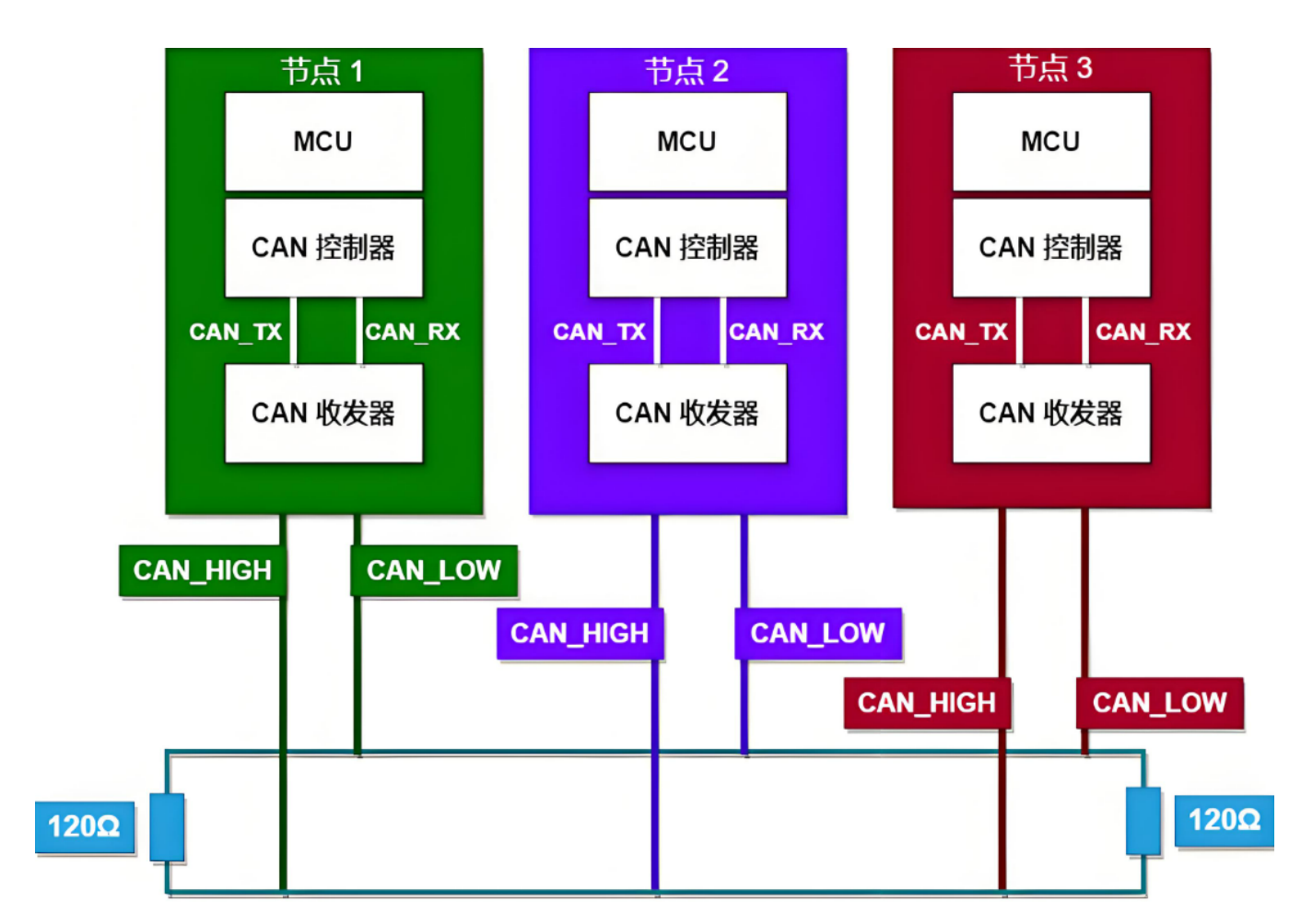
CAN的差分传输
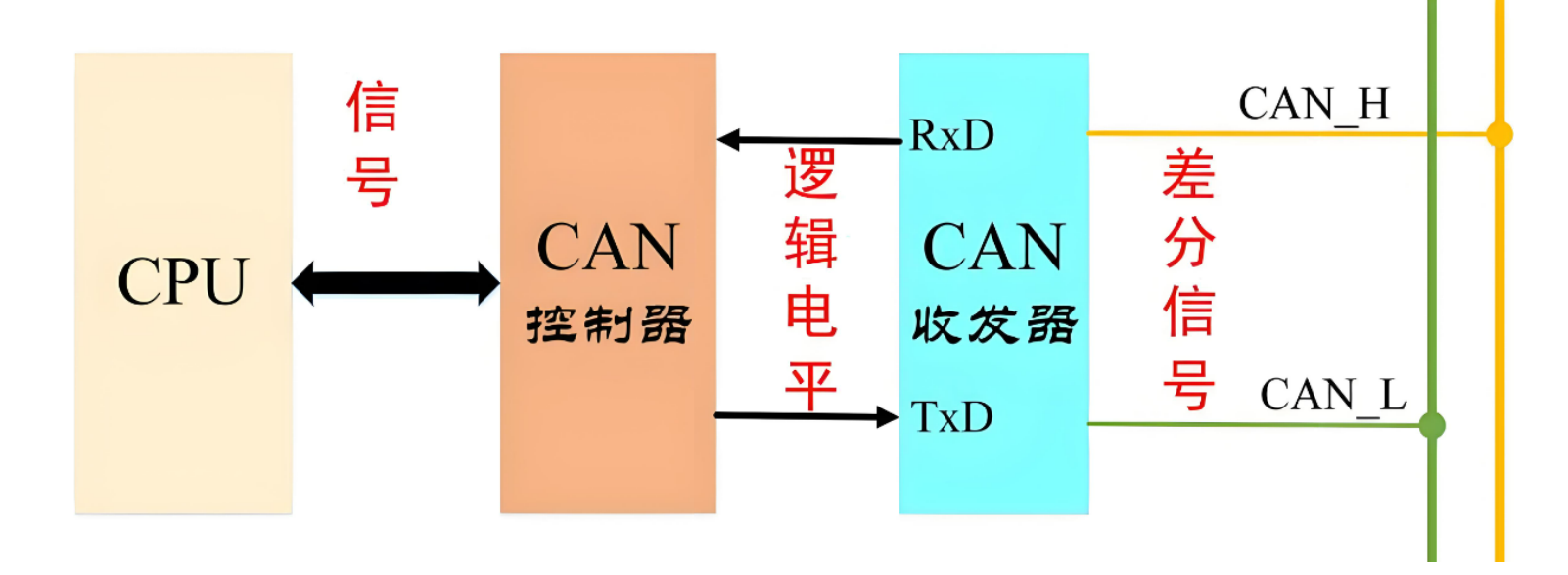
采⽤双线差分信号,两根线构成总线,CAN High与CAN Low,这两根线之间的电位差可以对应两个不同的逻辑状态进⾏编码。
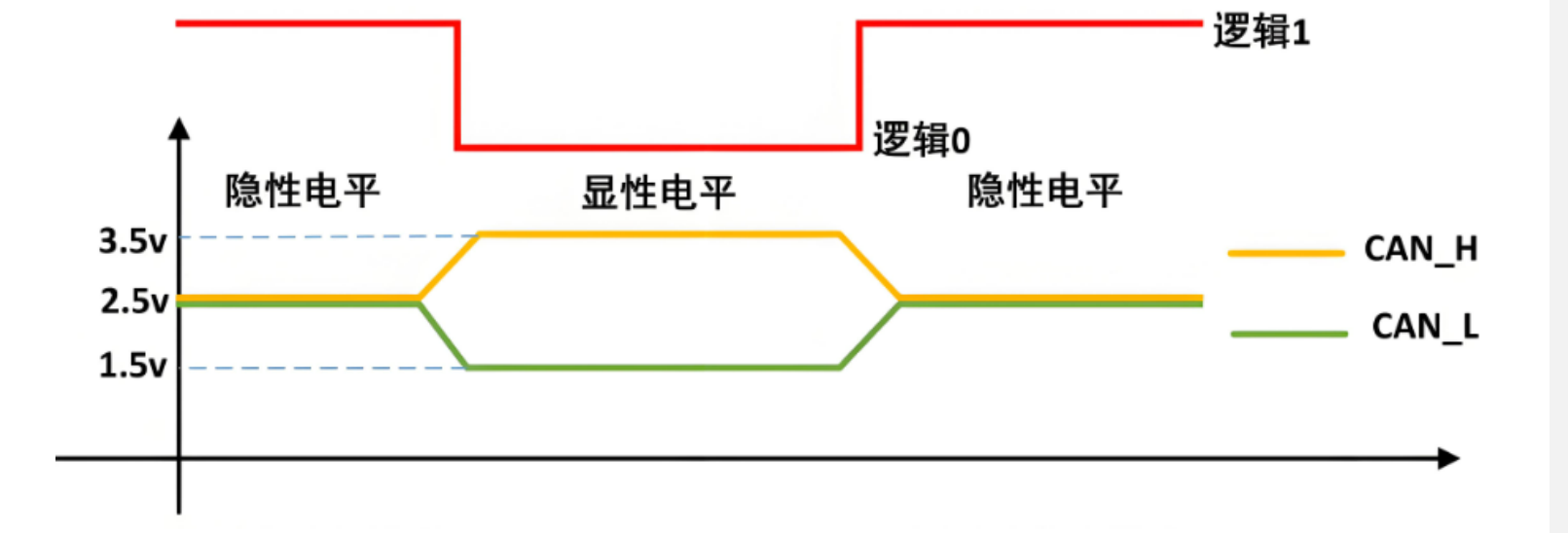
当CAN_H和CAN_L均是2.5V左右,此时CAN_H和CAN_L的压差为0V,此时状态表⽰为逻辑1,称为隐性位。
当CAN_H=3.5V和CAN_L=1.5V,此时CAN_H和CAN_L的压差为2V,此时状态表⽰为逻辑0,称为显性位,竞争时显性位优先。
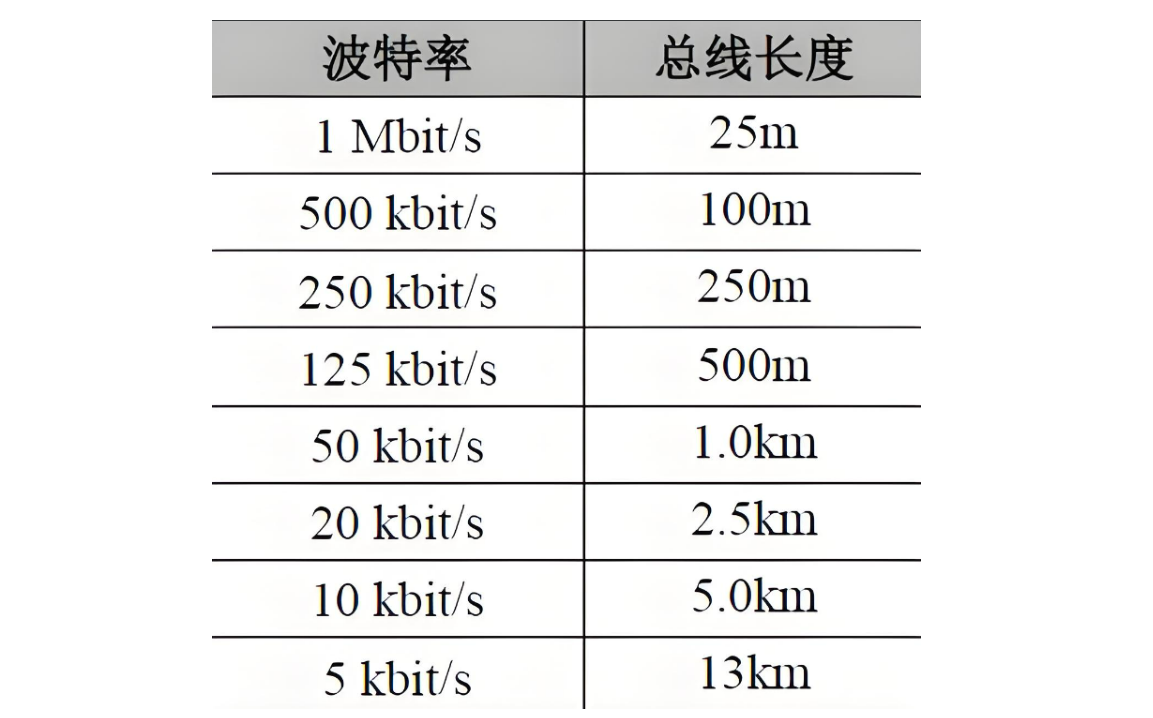
CAN的传输距离
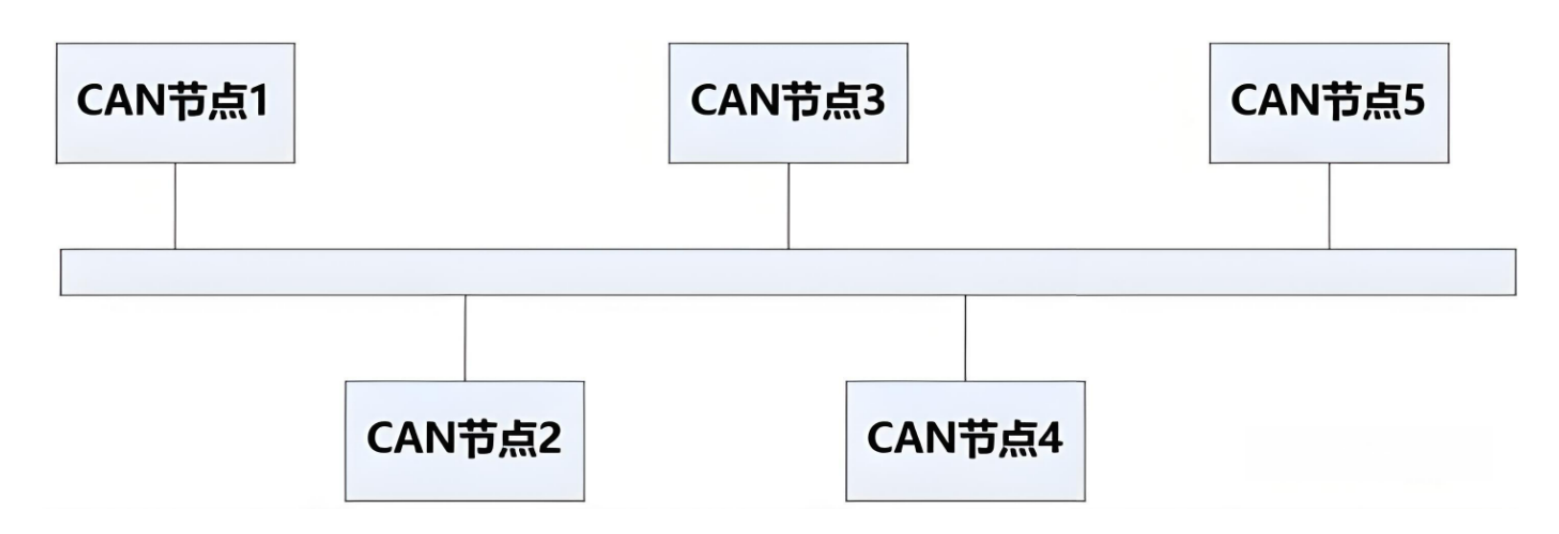
CAN总线组⽹⽅式
CAN总线节点数量
协议本⾝对节点的数量没有限制,实际应⽤中节点数⽬受⽹络硬件的电⽓特性所限制。
总线上节点的数量可以动态改变,发送⼴播报⽂,报⽂可以被所有节点同时接收。
CAN总线数据格式
CAN总线节点上的节点发送数据是以报⽂的形式⼴播给⽹络中所有节点。收发器接收到数据就把数据传送给控制器,再由控制器检查判断
是不是所需数据。不是则忽略。
⽹络上任何⼀个节点在任何时候都可以发送数据。
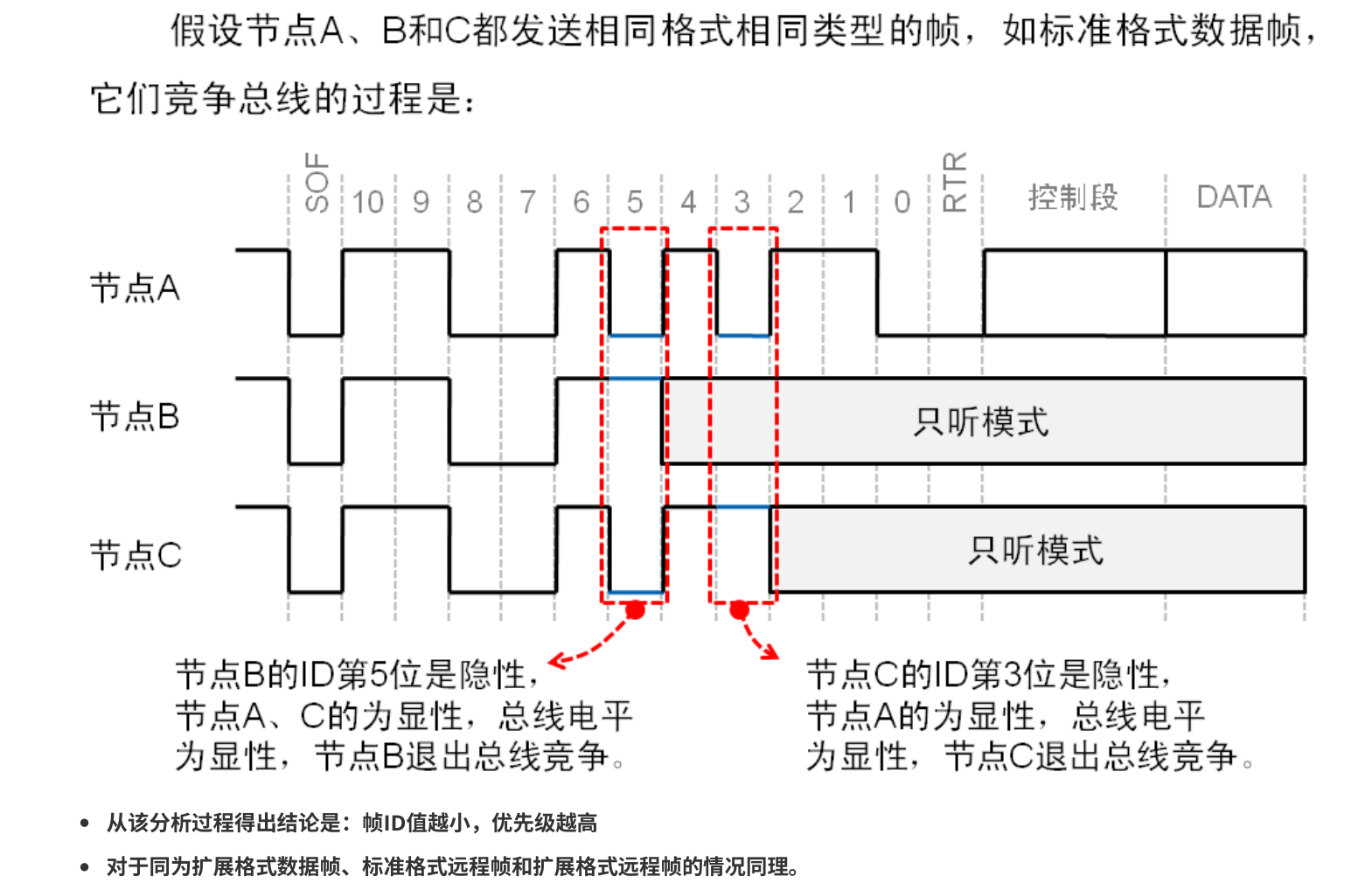
多个节点发送数据,优先级低主动退出发送。
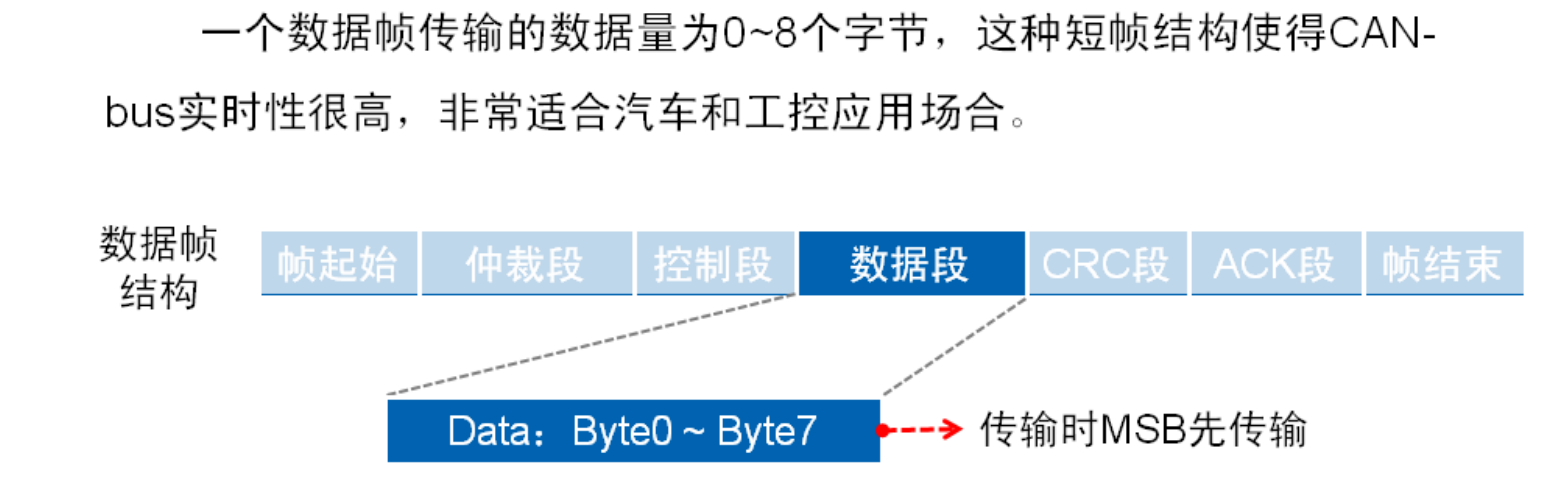
短帧结构,每帧数据信息为0~8字节(具体⽤⼾定义),对数据编码⽽不是地址编码。
CAN每帧都有CRC校验和其他检验措施,严重错误的情况下具有⾃动关闭输出的功能。
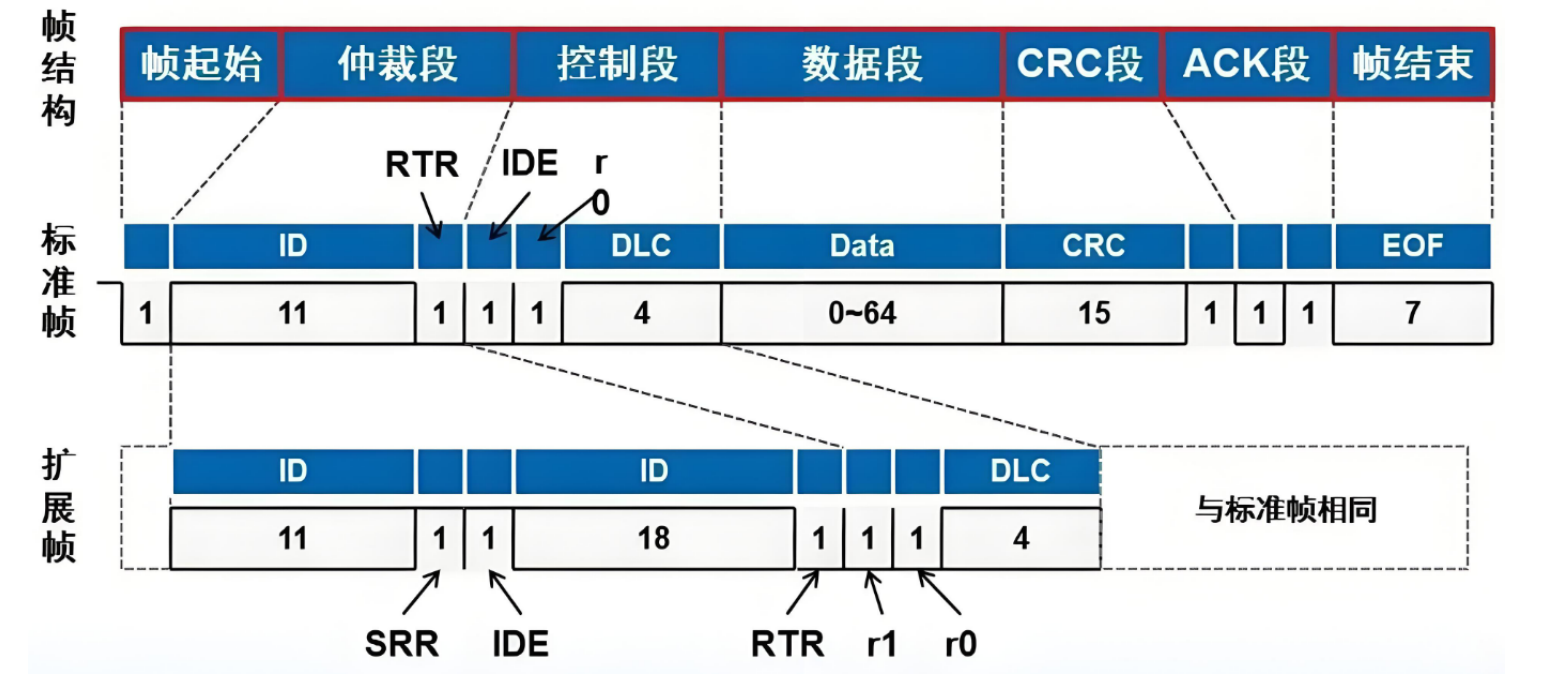
数据帧
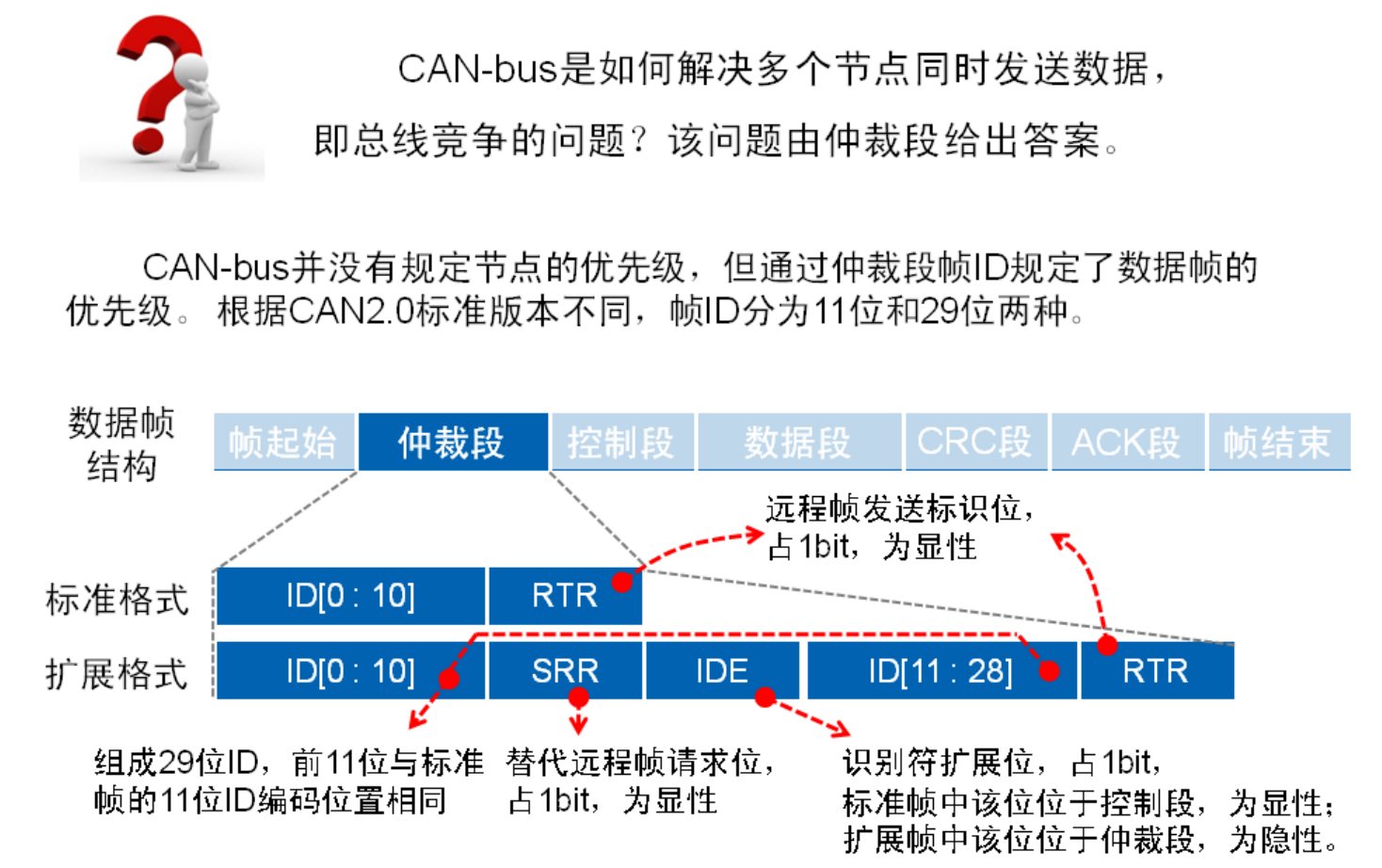
结构上由7个段组成,其中根据仲裁段ID码⻓度的不同,分为标准帧(CAN2.0A)和扩展帧(CAN2.0B)。
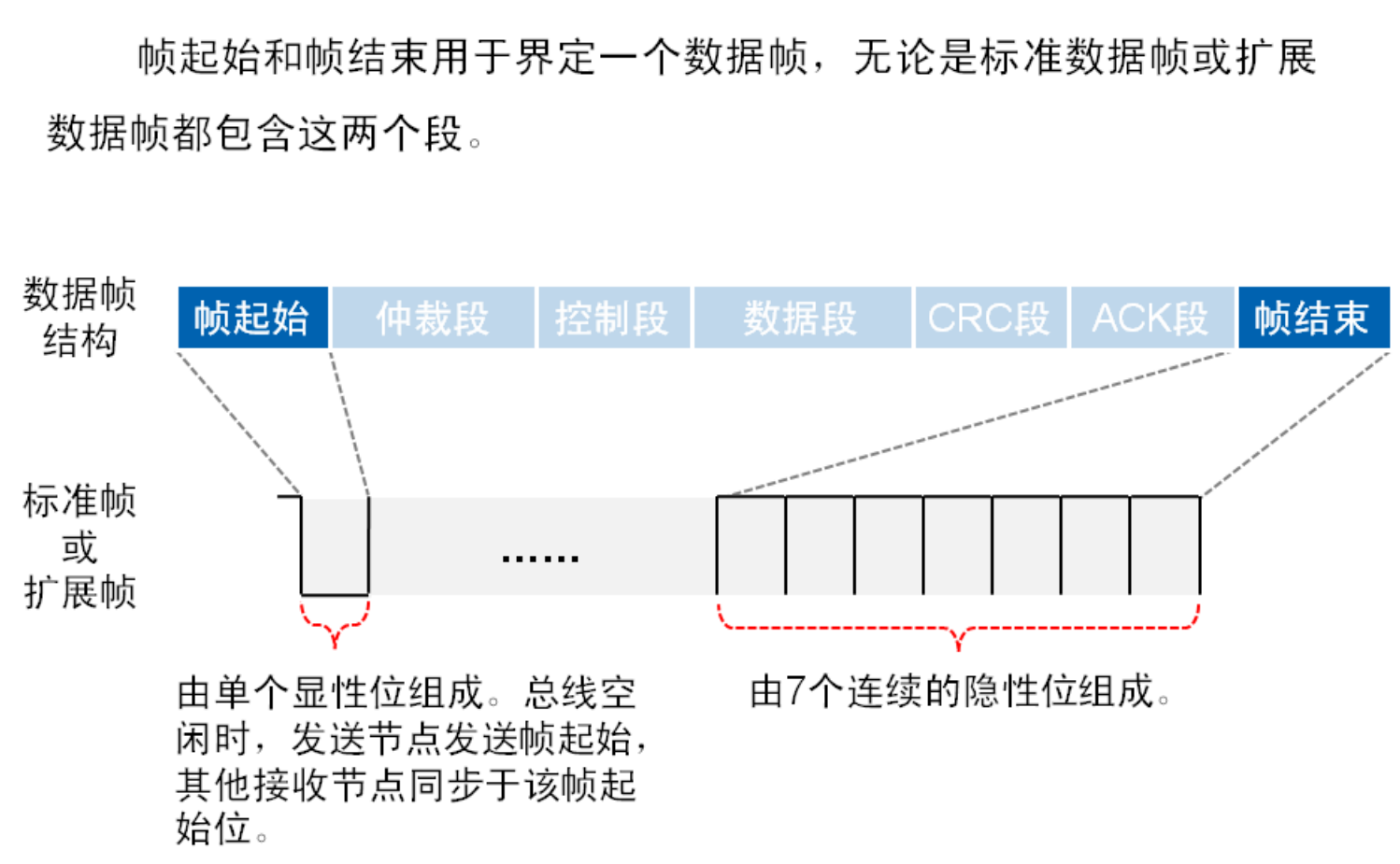
帧起始、帧结束
1个位的低电平表⽰帧的开始
7个位的⾼电平表⽰帧的结束
仲裁段
数据段
CANopen对象字典
CANopen对象字典(OD: Object Dictionary)是CANopen协议最为核⼼的概念。
对象字典就是⼀个有序的对象组,描述了对应CANopen节点的所有参数。
最简单的理解就是json字符串
每个对象采⽤⼀个16位的索引值来寻址,这个索引值通常被称为索引,其范围在0x0000到0xFFFF之间。
为了避免数据⼤量时⽆索引可分配,在某些索引下定义了⼀个8 位的索引值,这个索引值通常被称为⼦索引,其范围是0x00到0xFF之间。
每个索引内具体的参数,最⼤⽤32位的变量来表⽰,即Unsigned32,四个字节。
CANOpen包括多种通信⽅式:主从站⽅式、客⼾端服务器⽅式以及⽣产者消费者模式。
SDO使⽤客⼾端服务器模式。
PDO采⽤⽣产者消费者模式。
整个CANopen采⽤主从⽅式通信。
SDO通信⽅式,⽤来传输⾮实时数据,类似于I2C协议通信、Modbus协议通信, 采⽤问答式通信。
PDO通信⽅式,⽤来传输实时数据,PDO 属于过程数据,即单向传输,⽆需接收节点回应报⽂来确认,属于⽣产消费模型。
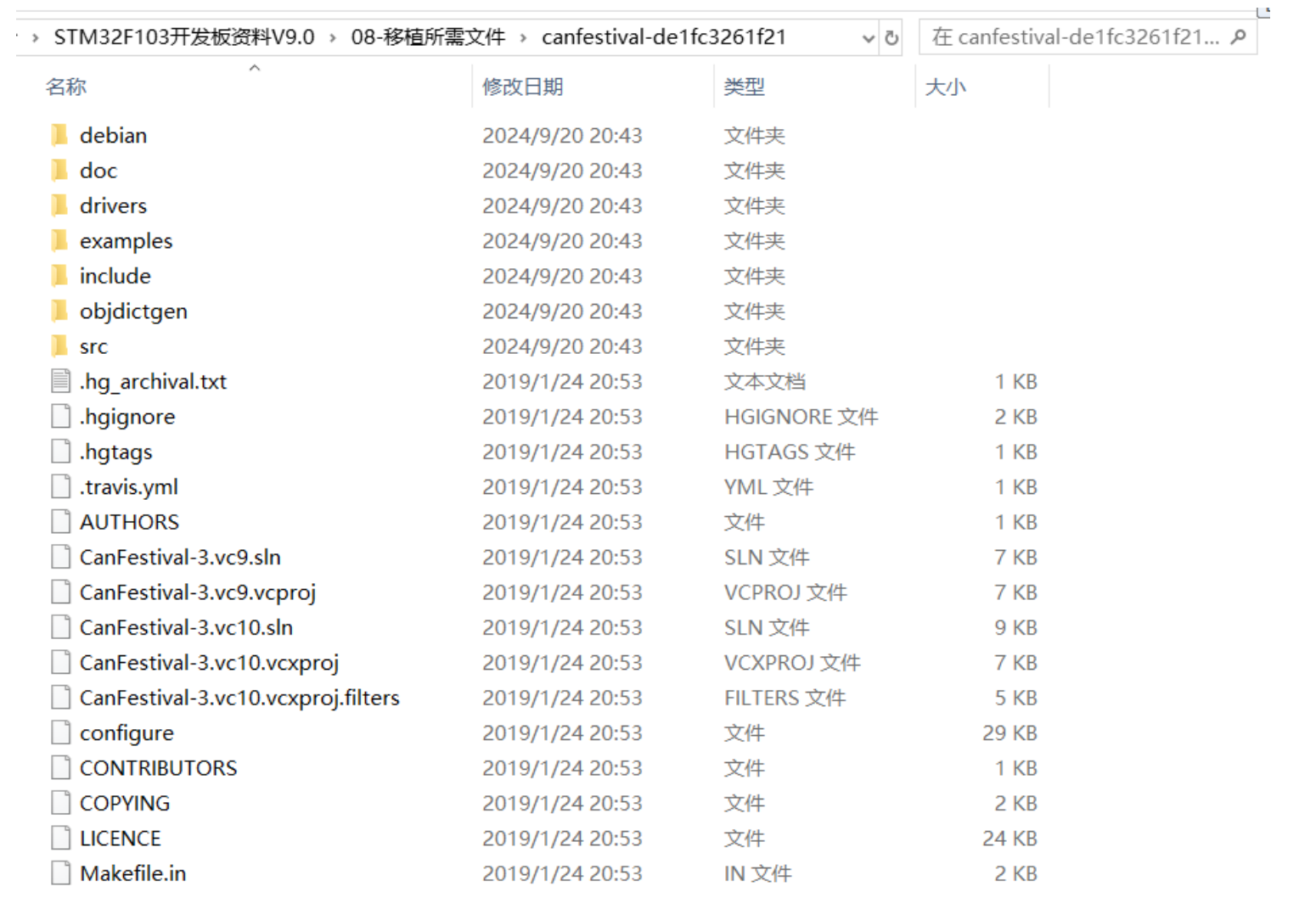
canfestival移植