GPS原理笔记三------GPS卫星轨道理论和计算
- [3 GPS卫星轨道理论和计算](#3 GPS卫星轨道理论和计算)
-
- [3.1 空间坐标系](#3.1 空间坐标系)
-
- [3.1.1 惯性坐标系(ECI)](#3.1.1 惯性坐标系(ECI))
- [3.1.2 地固坐标系(ECEF)](#3.1.2 地固坐标系(ECEF))
- [3.1.3 WGS-84坐标系(WGS-84)](#3.1.3 WGS-84坐标系(WGS-84))
- [3.1.4 直角坐标系间的旋转变换](#3.1.4 直角坐标系间的旋转变换)
- [3.1.5 站心坐标系(ENU)](#3.1.5 站心坐标系(ENU))
- [3.2 时间系统](#3.2 时间系统)
- [3.3 GPS卫星轨道理论](#3.3 GPS卫星轨道理论)
- [3.4 卫星空间位置的计算](#3.4 卫星空间位置的计算)
- [3.5 卫星运行速度的计算](#3.5 卫星运行速度的计算)
- [3.6 卫星轨道的插值计算](#3.6 卫星轨道的插值计算)
- 总结
3 GPS卫星轨道理论和计算
为了确定卫星在某一时刻的空间位置,需要结合时间和空间坐标系。
3.1 空间坐标系
通常用一个物体在空间坐标系中的坐标来描述该物体在空间中的位置。通常分为惯性坐标系和地球坐标系。介绍常用概念:
c
南极、北极:地球自转轴与地球表面的交点,统一称为地级。
赤道面 :通过地球质心(又地心)与地球自转轴垂直的平面。
赤道 :赤道面与地球表面形成的大圆。
子午面 :包含地球自转轴的任何一个平面。
子午圈 :子午面与地球表面相交形成大圆。
黄道 :地球绕太阳公转的轨道与地球表面相交的大圆。
黄赤交角 :黄道面与赤道面的夹角,约23.5°。
南黄级、北黄极:通过地心且与黄道面垂直的直线跟地球表面的交点。
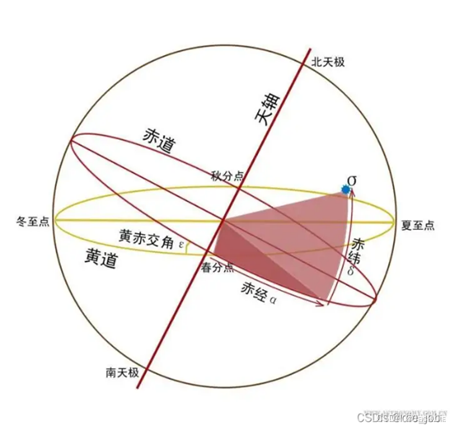
春分点 :当太阳的投影沿着黄道从地球的南半球向北半球运动时与赤道的交点。因地心到春分点的方向不会随地球自转和公转而发生变化,所以春分点是天文和大地测量学的重空间基准点。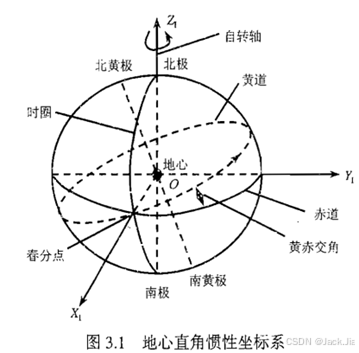
3.1.1 惯性坐标系(ECI)
在空间静止或做匀速直线运动的坐标系叫惯性坐标系。图3.1是地心惯性坐标系,可以用(X,Y,Z)表示坐标。地球质心O为原点,以北极为指向自转轴方向为Z轴,X轴指向春分点,XYZ构成右手直角坐标系统。
严格意义上讲,地球不能看做是惯性坐标系。因为,地球及其质心在绕太阳做非匀速圆周运动,且地球自转轴在空间的方向不是固定不变的,而是存在复杂运动。地球自转轴这种运动的原因是密度不均匀且赤道隆起且在日月引力的共同作用,其中月球引力作用最大。地球自转轴绕北黄极做缓慢旋转,周期大概25800年。地球自转轴在绕北黄极旋转的同时,地球自转轴还存在一种称为章动的局部小幅旋转。
由于GPS卫星旋转周期12小时,远远小于地球公转和岁差和章动现象的周期,所以对于描述GPS卫星轨道周期而言,地心直角坐标系在一小段时间内可以近似看做是做匀速直线运动的惯性坐标系。
3.1.2 地固坐标系(ECEF)
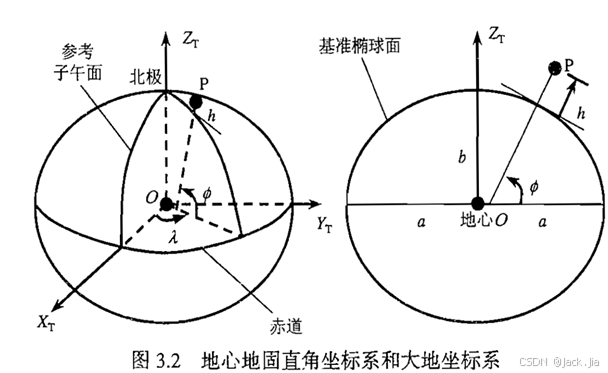
地固坐标系(又叫地球坐标系),地球坐标系是固定在地球上随地球一起在空间做公转和自转运动。由于地固坐标系中,地球上任意一点坐标就不会由地球旋转以及自转轴方位变化有关的岁差和章动而变化。地心地固坐标系(ECEF坐标系)的Z轴与地球自转轴 重合并指向北极,X轴指向参考子午面(格林尼治子午面)与赤道的一个交点,XYZ轴构成右手直角坐标系,
大地坐标系由大地经度、大地维度、大地高度构成,因此也称作LLA坐标系。
图3.2左---地心直角坐标系(X_T, Y_T, Z_T),图3.2右---大地坐标系(φ,γ,h)。
误差说明:
由于地固坐标系的Z轴与地球自转轴重合,然后地球自转轴在地球南北两级每年以几米的速度沿着一个半径约几十米的小圆移动,为了克服地移带来的困难,建议将1900年-1905年地级实际位置平均值作为基准点,这个基准点被称为协议地级(CTP),相应的赤道面叫做协议赤道面。
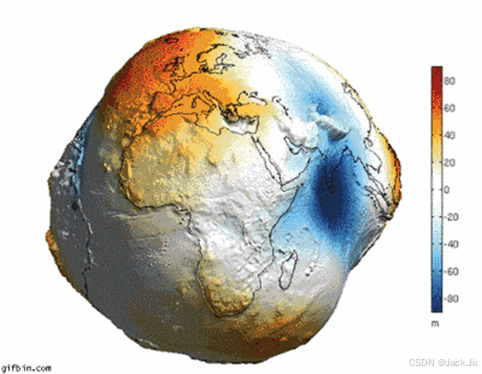
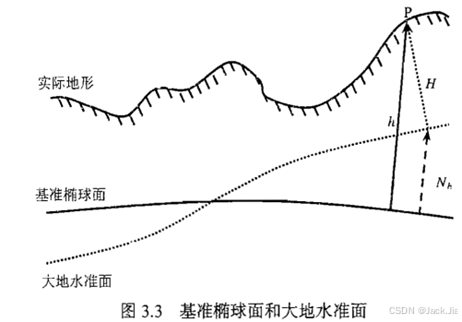
为了给出大地坐标系的大地高度,定义了与地球最接近的地球椭球体来代替凹凸不平的地球,这个拖球体被称为基准椭球体。基准椭球体长半径长a,短半径长b,并呈以短轴为中心的旋转对称。
c
大地纬度φ:过P点的基准椭球面法线与赤道面之间的夹角,范围-90°~ 90°,赤道面以北为正,以南为负。
大地经度γ:过P点的子午面与格林尼治子午面之间的夹角,精度范围-180°~ 180°格林尼治子午面以东为正,以西为负,
大地高度h:从P点到基准椭球面的法线距离,基准椭球面以外为正,以内为负。
大地水准面高度N_h
海拔高度H
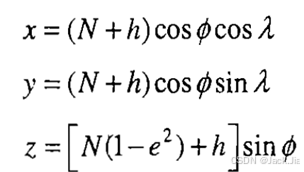
大地坐标系(LLA坐标系)转地心地固坐标系(ECEF坐标系),如下:
参数说明:
c
(x, y, z) :地心地固坐标系
(φ,γ,h) :大地坐标系
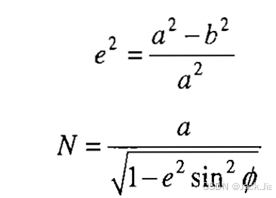
N :基准椭球体卯酉圆曲率半径
e :椭球体偏心率
a :长半径
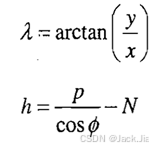
b :短半径地心地固坐标系(ECEF坐标系)转大地坐标系(LLA坐标系),如下:
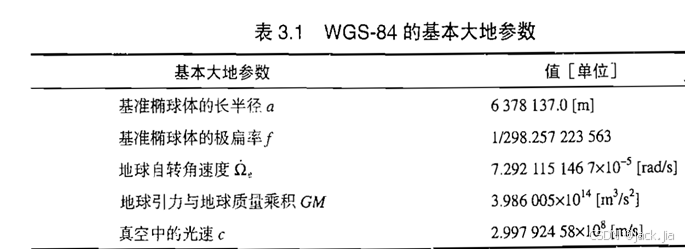
3.1.3 WGS-84坐标系(WGS-84)
1984年由美国国防部制定世界大地坐标系(WGS)是相当精确的直角坐标系,又叫WGS-84直角坐标系或WGS-84直角坐标系。
WGS-84坐标系给出了一些基本参数:
基准椭球体极扁率f定义如下:
偏心率e和极扁率f关系如下:
地球引力常数μ等于,

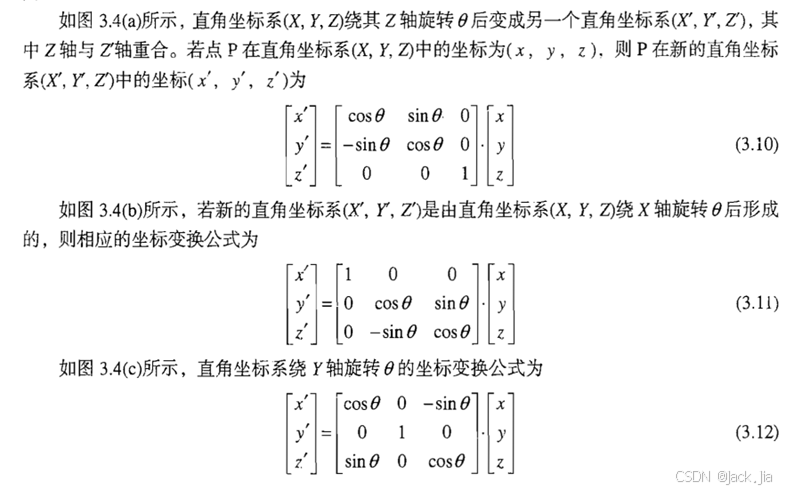
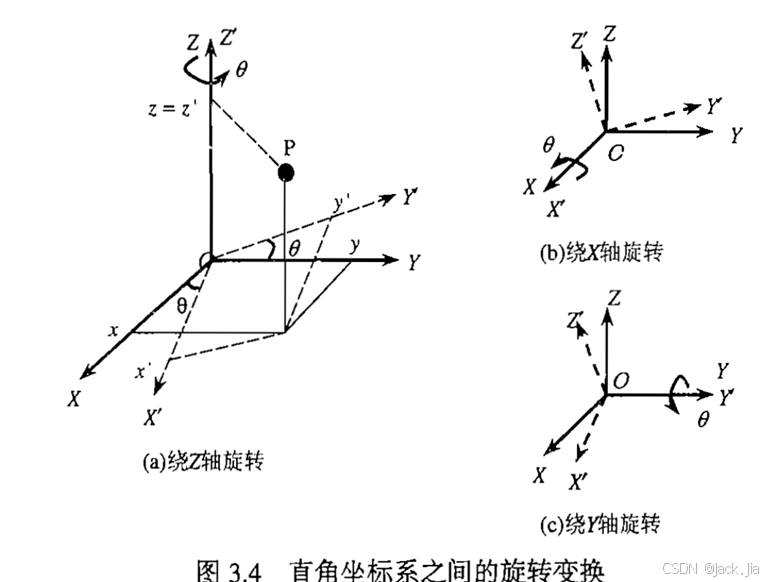
3.1.4 直角坐标系间的旋转变换
不同直角坐标系可以通过平移和旋转互相转换。比如:地心直角坐标系可以通过坐标旋转得到地心地固坐标系。
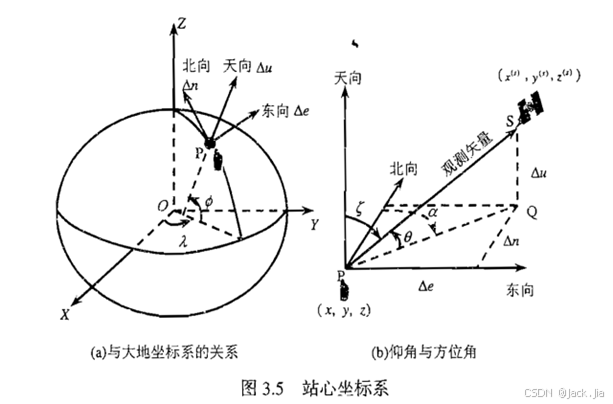
3.1.5 站心坐标系(ENU)
站心坐标系(ENU 坐标系)以用户所在位置P为坐标原点,天向坐标与大地坐标系在该点高度方向一致,北向和东向,三个坐标分别相互垂直。
3.2 时间系统
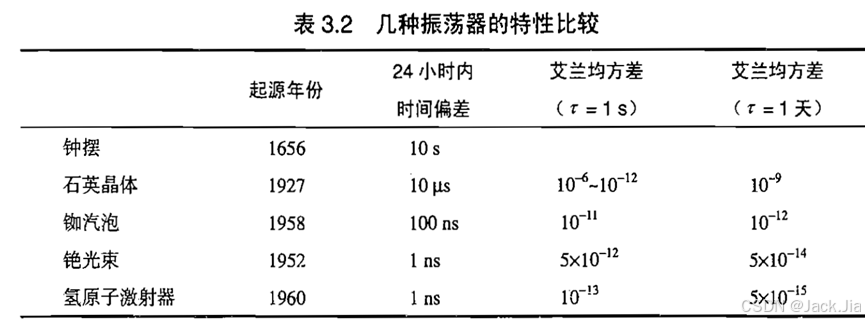
时间是7大基本物理单位之一。时间实际可以分为时刻和时段。建立一个时间系统通常需要反复观察、连续、稳定的周期运动现象作为基准,经常作为时间系统的周期现象有钟摆、地球自转、晶振体振荡频率。
世界时(UT)以地球自转为基础的时间系统,由于极移、地球不恒定速度旋转,导致世界时是一个不严格均匀的时间。
原子时(AT)物质内部两个能级之间跃迁,原子会辐射或吸收一定电磁波能量,而原子钟就是以这种高度稳定的电磁波频率作为振荡频率,相应原子时也是建立在原子钟守时和授时基础之上。1972年,国际原子时成为用来建立协调时间时(UTC)的国际标准。当协调时(UTC)与世界时(UT)差距超过0.9时,协调时采用润秒方法加插1秒,使协调时(UTC)与世界时始终保持在0.9秒误差范围内。
格林尼治时间(GMT)通常指协调时,有时候也指修正世界时UT。
GPS时间(GPST)基于原子时的GPS时间系统,基于地面站上的原子时钟和卫星上的原子钟观测综合所得出,GPST是连续的,不会出现跳秒现象。GPS的零时刻与协调时1980年1月6日(星期天)零时刻相一致。自那时刻起,GPS时开始周二复始地计数。
每颗GPS卫星都装有铷(Rb)原子钟和铯(Cs)原子钟。
晶体振荡器的工作原理是晶体的压电效应,当晶体的形状受到外力作用时,它会在其表面产生压力或电荷。为了启动晶体振荡器,我们将一个随机噪声交流电施加到晶体,晶体开始各种成分的伸长、缩短运动,而这些伸长、缩短运动又引起晶体表面的交流电压,然后我们再将晶体表面这些电压施加到晶体,如此反复。随着噪声交流电压中的一个频率与晶体频率一致的信号成分经过不断放大、反馈,最终成为这一个反馈电路唯一存活下来的信号,而其他信号由于不能和晶振体产生共振而逐渐衰减,于是晶振就以一个单一频率振荡起来了。 频率准确度:我们设置的标准时间值与显示的时间测量值
c
f_0:设置的标准频率
f_0:振荡器的实际工作频率
F :频率偏差率
频率稳定度经常用艾兰均方差σ_A (τ)来衡量。 
根据狭义相对论,指出高速运行的GPS卫星在地面看起来呈现时间膨胀现象, 也就是说GPS上的原子时钟比在地面上的相同原子钟运行慢。根据狭义相对论,我们可以计算、预测GPS卫星原子时钟每天要变慢7μs。
根据广义相对论,GPS卫星运行在高空,原理地球,则由地球质量引起的时空弯曲度越小。对比在时空弯曲度较大的地面上的原子钟,运行在时刻弯曲度较小的GPS卫星原子钟在地面上看起来会变快。通过计算表明,GPS卫星原子钟比在地面上一模一样的原子钟每天要快45 μs。
综合狭义相对论和广义相对论共同作用,在高空高速运行的GPS卫星要比地面上每天要快45 μs-7 μs = 38 μs。
GPS卫星提供的基本频率f_0为10.23MHz。为了补偿相对论效应,我们在设计GPS卫星时钟时,必须减少实际运行的基本频率f_0到10.29 999 995 43MHz,即Δf为-0.00457Hz。这样GPS卫星发射升空后,它的时钟频率和地面看起来正好相等。同时GPS卫星运行是一个椭圆而不是正圆,所以地面上的GPS用户接收机还需要根据卫星当前位置再对相对论效应做适当校正。
3.3 GPS卫星轨道理论
GPS卫星随着时间变化的卫星空间位置称为运行轨道。人造地球卫星在空间中绕地球运行时,它主要收到来自地球的引力影响。假设地球是一个均匀质量的理想球体,并且卫星引力是卫星受到的唯一外力,这种理想状态下卫星的运行轨道叫做无摄运行轨道 ,它可以用开普勒定律(1571~1630)解释。
开普勒第一定律:所有行星绕太阳运行轨道都是呈椭圆,太阳位于一个焦点。
参数解释:
c
a_s :长半径
b_s :短半径
e_s :偏心率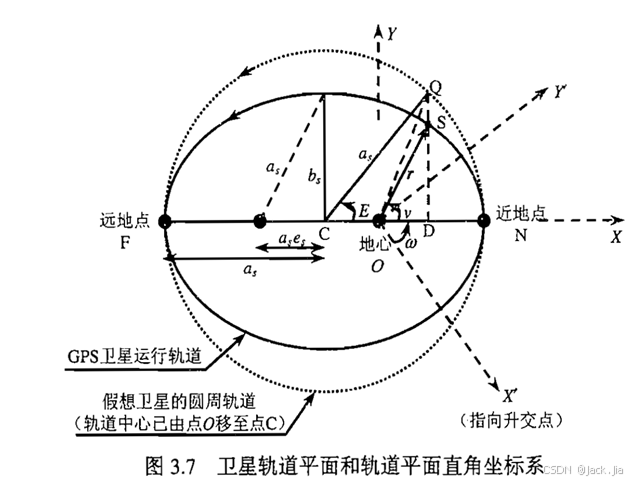
开普勒第二定律:连接行星和太阳的直线在相等时间内扫过的面积相等。
表示卫星运行速度是时刻变化的,在近地点最快,在远地点最慢,折射卫星在运行过程中其动能和势能在时刻交换结果导致。
开普勒第三定律:不同行星绕太阳运行的公转周期平方分别和它们轨道长半径的立方成正比。
参数说明:
c
T: 运行周期
A_s:长半径
n :平均角速度开普勒轨道参数:
说明:
c
地心地固坐标系(wgs-84) :(X_T,Y_T,Z_T)
轨道平面直角坐标系 :(X', Y', Z')GPS的地面监测部分通过持续接收、测定卫星所发射的信号来确定卫星的运行轨道,然后推算出一组以时间为函数的轨道参数来精确描述、预测卫星的运行轨道,再将这些轨道参数发给卫星,让卫星转播。GPS接收机正是接收到这些参数,然后利用这些参数计算出卫星的位置和速度。
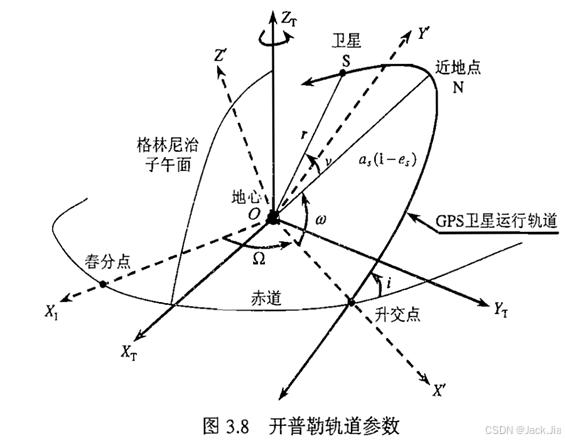
GPS的无摄椭圆轨道运动可以用开普勒轨道参数来描述,而每套开普勒轨道参数由6个数组成,图3.8绘制了这些参数的含义:
c
1、轨道升交点赤经Ω
2、轨道倾角i
3、近地点角距ω
4、长半径a_s
5、偏心率e_s
6、真近点角ν卫星赤道升交点,简称升交点,它是卫星由南向北运行时轨道与赤道的交点。GPS卫星实际不会给出真近点角ν,而是给出两个辅助量,偏近点角E和平近点角M。 真近点角是与时间有关的函数,而其他五个均是常数。
c
真近点角ν : ∠NOS
偏近点角E : ∠NCQ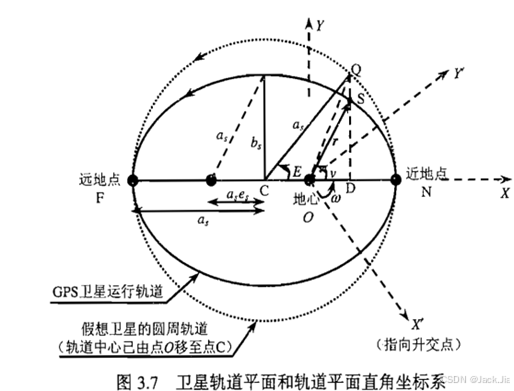
平近点角M :是一个虚构量,假象做圆周运动的卫星和做椭圆运动的真实卫星运动周期T相等,而且假设的圆周运动的卫星角速度和做椭圆运动的真实卫星的平均角速度n相等。这两颗卫星在t_0时刻同时通过近地点N并且运行方向一致,那么在t时刻真是的卫星平近点角M定义为假象卫星角距
根据开普勒方程给出,
上式可以根据平近点角M和偏心率e_s通过迭代计算出真近点角E。为了理解上式,对上式左右都乘1/2 a_s^2得到,
等号右边第一项是点C和圆弧NQ构成的面积,等号右边第二项是三角形COQ的面积,
等号左边是点三角形ONQ的面积。
椭圆轨道极坐标形式(r,v),卫星矢经长度r,r指的是从地心到卫星的距离。椭圆的极坐标方程
参数说明:
c
矢经长度:r
长半径 :a_s
偏心率 :e_s
真近点角:ν
上式改写成
给定E值,
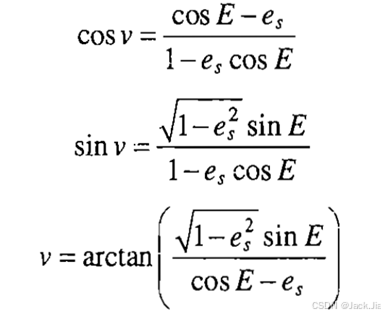
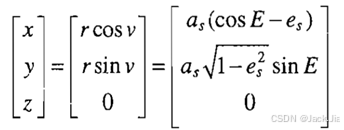
上面接出了v和r值,卫星所在极坐标(r,v)可以转换成轨道平面直角坐标系,可以确定x,y值,
可得卫星直角坐标系的运行速度如下,
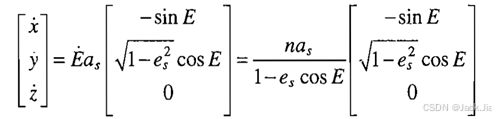
其中,偏近点角E,和偏近点角对时间的导数E' 。
然而,地球卫星除了受到地球的引力,还会受到来自其他力,如:太阳、月球、太阳辐射压力、地球不规则形状、不均匀质地等影响,导致开普勒参数不再是常数。为了精确描述GPS卫星轨道,采用拓展后的开普勒轨道参数,共计16个。
t_oe星历参数:当GPS时间在2小时以内,则这套星历参数被认为是有效,一套星历参数被表示为以t_oe为中心的4小时。每颗卫星播发关于自身星历参数。
轨道六根数:轨道升交点赤经Ω、轨道倾角i、近地点角距ω、长半径a_s、偏心率e_s、真近点角ν。
至此还差9个,∆n、I ̇和Ω ̇分别是对M、i和Ω进行校正;
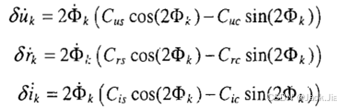
C_us和C_uc是对升交点角距进行校正。
C_rs和C_rc是对轨道半径进行校正。
C_is和C_ic是对轨道倾角进行校正。
刚好介绍了剩余9个,这些是摄动校正量星历参数。
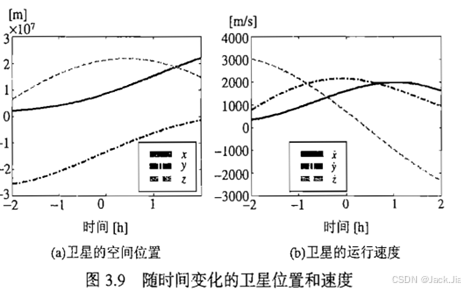
3.4 卫星空间位置的计算
卫星平均角速度n求解如下,
t时刻与t_oe参考时间差值,
卫星平均角速度n求解如下,

参数说明:
c
∆n :卫星平均角速度校正值
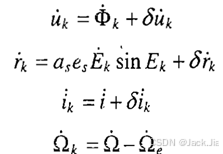
Φ_k :升交点角距
v_k :真近点角
ω :近地点角距
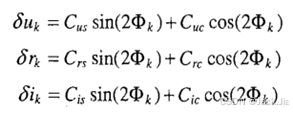
δ_uk :二次谐波摄动量,即对升交点角距u_k作用如下,
δ_rk :二次谐波摄动量,即对升交点角r_k作用如下,
δ_ik :二次谐波摄动量,即对升交点角距i_k作用如下,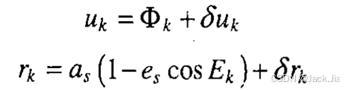

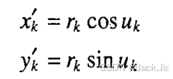
计算轨道平面直角坐标系坐标(x_k', y_k')
升交点赤经线性方程如下,

参数说明:
c
(Ω_e ) ̇ :地球自转角速度常量
Ω_k :t时刻的,卫星升交点在t时刻的WGS-84坐标系中的经度,便可将卫星轨道平面直角坐标系转成WGS-84地心地固直角坐标系坐标如下,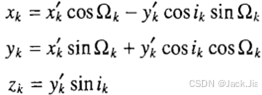
3.5 卫星运行速度的计算
如果需要确定用户站的速度,则需要知道每颗卫星的运行速度。卫星的运动速度简单来说是卫星空间位置对时间的变化率。对(x_k,y_k,z_k)求导得到星历参数表达式的卫星速度公式,
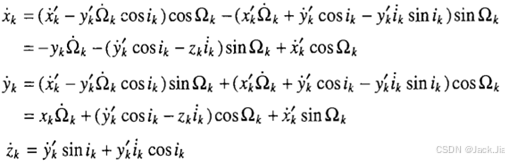
等号右边数据求解如下:
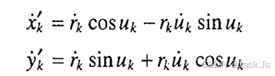

进行求导整理得到如下,


参数说明:
c
(x_k,y_k,z_k) :卫星在地心地固坐标系下的坐标
((x_k ) ̇,(y_k ) ̇,(z_k ) ̇) :卫星在地心地固坐标系下的速度
(x_k',y_k') :卫星在轨道平面直角坐标系坐标坐标
(u_k' ) ̇ :由u_k'求导得到
(r_k' ) ̇ :由i_k'求导得到
(i_k' ) ̇ :由i_k'求导得到
(Ω_k' ) ̇ :由Ω_k'求导得到
(Ω_k' ) ̇ :由Ω_k'求导得到
δ(u_k ) ̇ :由δ_uk求导得到
δ(r_k ) ̇ :由δ_rk求导得到
δ(I_k ) ̇ :由δ_ik求导得到
(ϕ_k ) ̇ :由ϕ_k求导得到
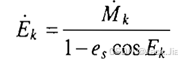
(E_k ) ̇ :由E_k求导得到
(M_k ) ̇ :由M_k求导得到3.6 卫星轨道的插值计算
由于接收机可能同时连接10颗GPS卫星,如果都按照1秒对应计算一个卫星坐标,那么这个计算量过大,会导致卡顿。采用100~200秒的分段三次埃米尔特差值法。差值法要求误差在10cm和1mm/s,它的计算速度要比直接拿星历计算快20倍。
总结
感谢阅读,祝君成功!
-by aiziyou