上一篇文章中,我们拆解了ViT的核心部件,尽管没有对核心原理进行过多探讨,但我们至少了解了各个部件的作用,本文中,我们将把这些部件拼接起来,构成完成的网络。
一、ViT的完整结构:编码器堆叠与位置编码
ViT的完整结构是图像分块嵌入→位置编码→编码器块堆叠→分类头,其中位置编码是保留图像空间信息的关键。
1.1 位置编码
图像分块后,序列的顺序对应图像的空间位置(如左上角块→右上角块→左下角块→右下角块),但Transformer的自注意力本身不包含位置信息,因此需要添加位置编码(Positional Encoding, PE)。
(1)正弦余弦位置编码
ViT采用无参数的正弦余弦位置编码,数学表达式为:
PE(pos,2i)=sin(pos100002i/D) PE_{(pos, 2i)} = \sin\left( \frac{pos}{10000^{2i/D}} \right) PE(pos,2i)=sin(100002i/Dpos)
PE(pos,2i+1)=cos(pos100002i/D) PE_{(pos, 2i+1)} = \cos\left( \frac{pos}{10000^{2i/D}} \right) PE(pos,2i+1)=cos(100002i/Dpos)
其中:
- pospospos:序列元素的位置索引(0到NNN);
- iii:特征维度索引(0到D/2−1D/2-1D/2−1);
- DDD:隐藏维度。
数学意义:
- 不同位置的编码具有独特的模式,模型可学习位置间的相对关系;
- 正弦余弦编码的周期性保证了位置编码的泛化性(可适配更长的序列)。
(2)位置编码的添加方式
将位置编码与块嵌入相加,数学表达式为:
zi0=E⋅xi+be+PEi(i=0..N) \mathbf{z}_i^0 = \mathbf{E} \cdot \mathbf{x}_i + \mathbf{b}_e + \mathbf{PE}_i \quad (i=0..N) zi0=E⋅xi+be+PEi(i=0..N)
其中PE0\mathbf{PE}_0PE0为类别嵌入的位置编码(通常设为0)。
2.2 ViT的完整前向流程
ViT的整体数学流程可总结为:
graph TD
A[输入图像 H×W×C] --> B[分块为 N 个 P×P×C 块]
B --> C[展平为 N×(P²C) 序列]
C --> D[块嵌入为 N×D 向量]
D --> E[添加类别嵌入 → (N+1)×D]
E --> F[添加位置编码 → (N+1)×D]
F --> G[编码器块堆叠(MSA+FFN+LN+残差)]
G --> H[取类别嵌入输出 → D 维特征]
H --> I[线性层分类 → 10 维输出(CIFAR-10)]3.3 ViT的层数设计逻辑
ViT的编码器块数量通常为12/24层,隐藏维度DDD为768/1024,头数hhh为12/16,其设计需满足:
Dmod h=0(保证多头拆分的维度整数) D \mod h = 0 \quad (\text{保证多头拆分的维度整数}) Dmodh=0(保证多头拆分的维度整数)
参数量≈h×(D×dk×3)+(D×4D+4D×D)×L \text{参数量} \approx h \times (D \times d_k \times 3) + (D \times 4D + 4D \times D) \times L 参数量≈h×(D×dk×3)+(D×4D+4D×D)×L
其中LLL为编码器块数量,dk=D/hd_k=D/hdk=D/h。
二、工程实战:PyTorch实现简易ViT(适配CIFAR-10)
我们实现一个轻量级ViT(适配CIFAR-10的32×32图像),并对比其与ResNet18的训练效果、参数数量。
2.1 完整代码实现
python
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np
import math
# 1. 全局配置
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
BATCH_SIZE = 128
EPOCHS = 20
LEARNING_RATE = 0.001
# 2. 数据预处理(CIFAR-10适配)
transform = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])
# 加载数据集
train_dataset = datasets.CIFAR10(
root="./data", train=True, download=True, transform=transform
)
test_dataset = datasets.CIFAR10(
root="./data", train=False, download=True, transform=transform
)
train_loader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=BATCH_SIZE, shuffle=False)
# 3. 定义ViT核心组件
# 3.1 图像分块嵌入模块
class PatchEmbedding(nn.Module):
def __init__(self, img_size=32, patch_size=4, in_channels=3, embed_dim=128):
super().__init__()
self.img_size = img_size
self.patch_size = patch_size
self.num_patches = (img_size // patch_size) ** 2
# 块嵌入:等价于卷积+展平
self.proj = nn.Conv2d(
in_channels, embed_dim, kernel_size=patch_size, stride=patch_size
)
def forward(self, x):
# x: [B, C, H, W] → [B, embed_dim, num_patches^(1/2), num_patches^(1/2)]
x = self.proj(x)
# 展平为序列:[B, embed_dim, N] → [B, N, embed_dim]
x = x.flatten(2).transpose(1, 2)
return x
# 3.2 位置编码(正弦余弦+可学习)
class PositionalEncoding(nn.Module):
def __init__(self, embed_dim, max_len=100):
super().__init__()
# 正弦余弦位置编码
pe = torch.zeros(max_len, embed_dim)
position = torch.arange(0, max_len, dtype=torch.float).unsqueeze(1)
div_term = torch.exp(torch.arange(0, embed_dim, 2).float() * (-math.log(10000.0) / embed_dim))
pe[:, 0::2] = torch.sin(position * div_term)
pe[:, 1::2] = torch.cos(position * div_term)
pe = pe.unsqueeze(0) # [1, max_len, embed_dim]
# 可学习的位置编码(可选)
# self.pe = nn.Parameter(torch.randn(1, max_len, embed_dim))
self.register_buffer('pe', pe) # 不参与训练的缓冲区
def forward(self, x):
# x: [B, N, embed_dim]
x = x + self.pe[:, :x.size(1), :].to(x.device)
return x
# 3.3 多头自注意力模块
class MultiHeadAttention(nn.Module):
def __init__(self, embed_dim, num_heads=8, dropout=0.1):
super().__init__()
self.embed_dim = embed_dim
self.num_heads = num_heads
self.head_dim = embed_dim // num_heads
assert self.head_dim * num_heads == embed_dim, "embed_dim must be divisible by num_heads"
# Q/K/V映射矩阵
self.q_proj = nn.Linear(embed_dim, embed_dim)
self.k_proj = nn.Linear(embed_dim, embed_dim)
self.v_proj = nn.Linear(embed_dim, embed_dim)
# 输出映射矩阵
self.out_proj = nn.Linear(embed_dim, embed_dim)
self.dropout = nn.Dropout(dropout)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x):
B, N, D = x.shape # B:批次, N:序列长度, D:嵌入维度
# 1. 映射为Q/K/V: [B, N, D] → [B, N, D]
q = self.q_proj(x)
k = self.k_proj(x)
v = self.v_proj(x)
# 2. 分拆头: [B, N, D] → [B, num_heads, N, head_dim]
q = q.reshape(B, N, self.num_heads, self.head_dim).transpose(1, 2)
k = k.reshape(B, N, self.num_heads, self.head_dim).transpose(1, 2)
v = v.reshape(B, N, self.num_heads, self.head_dim).transpose(1, 2)
# 3. 计算注意力得分: [B, num_heads, N, N]
attn_scores = (q @ k.transpose(-2, -1)) / math.sqrt(self.head_dim)
attn_weights = self.softmax(attn_scores)
attn_weights = self.dropout(attn_weights)
# 4. 加权求和: [B, num_heads, N, head_dim]
attn_output = attn_weights @ v
# 5. 拼接头: [B, N, D]
attn_output = attn_output.transpose(1, 2).reshape(B, N, D)
# 6. 输出映射
output = self.out_proj(attn_output)
output = self.dropout(output)
return output, attn_weights
# 3.4 编码器块
class TransformerEncoderBlock(nn.Module):
def __init__(self, embed_dim, num_heads, ff_dim=256, dropout=0.1):
super().__init__()
# 多头自注意力
self.attn = MultiHeadAttention(embed_dim, num_heads, dropout)
# 前馈网络
self.ffn = nn.Sequential(
nn.Linear(embed_dim, ff_dim),
nn.ReLU(inplace=True),
nn.Dropout(dropout),
nn.Linear(ff_dim, embed_dim),
nn.Dropout(dropout)
)
# 层归一化
self.ln1 = nn.LayerNorm(embed_dim)
self.ln2 = nn.LayerNorm(embed_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, x):
# 残差连接 + MSA
attn_output, attn_weights = self.attn(self.ln1(x))
x = x + attn_output
# 残差连接 + FFN
ffn_output = self.ffn(self.ln2(x))
x = x + ffn_output
return x, attn_weights
# 3.5 完整ViT模型
class ViT(nn.Module):
def __init__(
self,
img_size=32,
patch_size=4,
in_channels=3,
embed_dim=128,
num_heads=8,
num_layers=6,
ff_dim=256,
num_classes=10,
dropout=0.1
):
super().__init__()
# 1. 块嵌入
self.patch_embed = PatchEmbedding(img_size, patch_size, in_channels, embed_dim)
num_patches = self.patch_embed.num_patches
# 2. 类别嵌入
self.cls_token = nn.Parameter(torch.randn(1, 1, embed_dim))
# 3. 位置编码
self.pos_embed = PositionalEncoding(embed_dim, max_len=num_patches + 1)
# 4. 编码器块堆叠
self.encoder_blocks = nn.ModuleList([
TransformerEncoderBlock(embed_dim, num_heads, ff_dim, dropout)
for _ in range(num_layers)
])
# 5. 分类头
self.ln = nn.LayerNorm(embed_dim)
self.head = nn.Linear(embed_dim, num_classes)
# 初始化权重
self.apply(self._init_weights)
def _init_weights(self, m):
if isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LayerNorm):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
B = x.shape[0]
# 1. 块嵌入
x = self.patch_embed(x) # [B, N, D]
# 2. 添加类别嵌入
cls_token = self.cls_token.expand(B, -1, -1) # [B, 1, D]
x = torch.cat((cls_token, x), dim=1) # [B, N+1, D]
# 3. 添加位置编码
x = self.pos_embed(x)
# 4. 编码器块堆叠
attn_weights_list = []
for block in self.encoder_blocks:
x, attn_weights = block(x)
attn_weights_list.append(attn_weights)
# 5. 分类
x = self.ln(x)
cls_output = x[:, 0] # 仅取类别嵌入的输出
logits = self.head(cls_output)
return logits, attn_weights_list
# 4. 训练/测试函数
def train(model, train_loader, criterion, optimizer, epoch):
model.train()
total_loss = 0.0
correct = 0
total = 0
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(DEVICE), target.to(DEVICE)
optimizer.zero_grad()
output, _ = model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
total_loss += loss.item()
_, predicted = torch.max(output.data, 1)
total += target.size(0)
correct += (predicted == target).sum().item()
if batch_idx % 100 == 0:
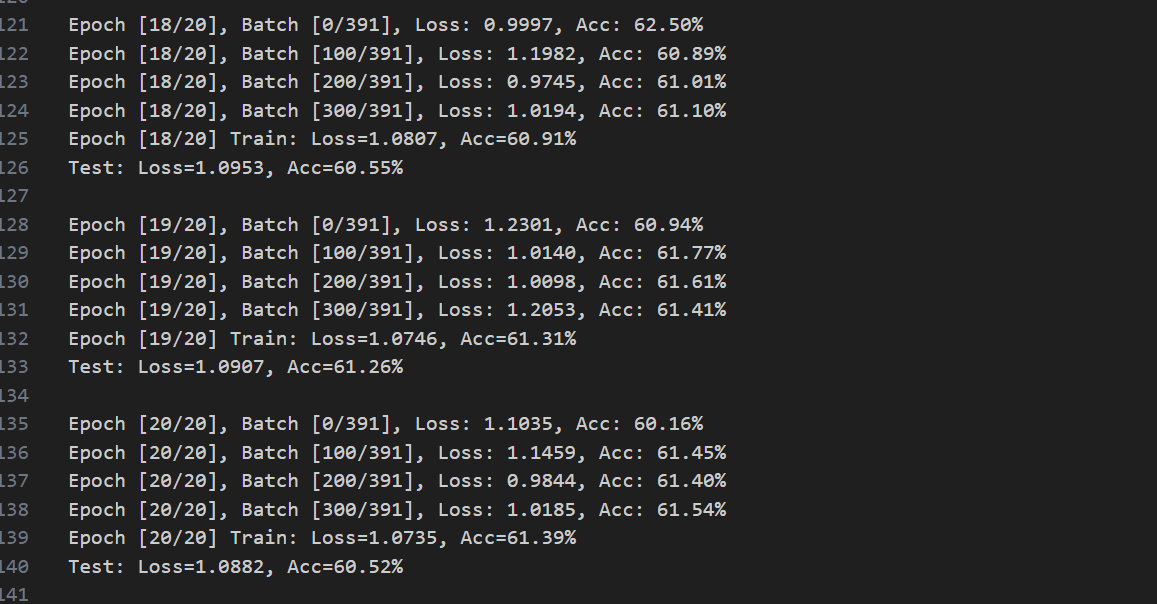
print(f'Epoch [{epoch+1}/{EPOCHS}], Batch [{batch_idx}/{len(train_loader)}], '
f'Loss: {loss.item():.4f}, Acc: {100*correct/total:.2f}%')
avg_loss = total_loss / len(train_loader)
avg_acc = 100 * correct / total
print(f'Epoch [{epoch+1}/{EPOCHS}] Train: Loss={avg_loss:.4f}, Acc={avg_acc:.2f}%')
return avg_loss, avg_acc
def test(model, test_loader, criterion):
model.eval()
total_loss = 0.0
correct = 0
total = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(DEVICE), target.to(DEVICE)
output, _ = model(data)
loss = criterion(output, target)
total_loss += loss.item()
_, predicted = torch.max(output.data, 1)
total += target.size(0)
correct += (predicted == target).sum().item()
avg_loss = total_loss / len(test_loader)
avg_acc = 100 * correct / total
print(f'Test: Loss={avg_loss:.4f}, Acc={avg_acc:.2f}%\n')
return avg_loss, avg_acc
# 5. 可视化自注意力权重
def visualize_attention(model, test_loader):
model.eval()
with torch.no_grad():
# 取一个批次的测试数据
data, _ = next(iter(test_loader))
data = data.to(DEVICE)
_, attn_weights_list = model(data)
# 取最后一层的注意力权重(第一个头,第一个样本)
attn_weights = attn_weights_list[-1][0, 0, :, :].cpu().numpy() # [N+1, N+1]
# 类别嵌入对所有块的注意力权重
cls_attn = attn_weights[0, 1:] # 跳过类别嵌入自身
num_patches = int(math.sqrt(len(cls_attn)))
cls_attn = cls_attn.reshape(num_patches, num_patches)
# 可视化
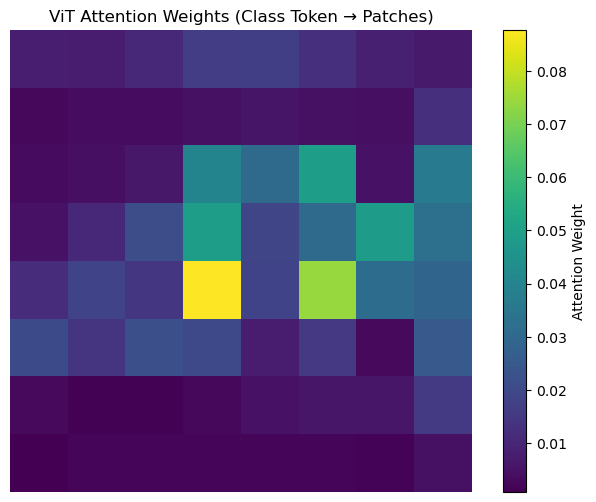
plt.figure(figsize=(8, 6))
plt.imshow(cls_attn, cmap='viridis')
plt.colorbar(label='Attention Weight')
plt.title('ViT Attention Weights (Class Token → Patches)')
plt.axis('off')
plt.show()
# 6. 初始化模型与训练
model = ViT(
img_size=32,
patch_size=4,
embed_dim=128,
num_heads=8,
num_layers=6,
ff_dim=256,
num_classes=10
).to(DEVICE)
# 计算参数数量
total_params = sum(p.numel() for p in model.parameters())
print(f"ViT Model Parameters: {total_params / 1e6:.2f}M")
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=LEARNING_RATE)
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=5, gamma=0.1)
# 记录训练过程
train_loss_history = []
train_acc_history = []
test_loss_history = []
test_acc_history = []
for epoch in range(EPOCHS):
train_loss, train_acc = train(model, train_loader, criterion, optimizer, epoch)
test_loss, test_acc = test(model, test_loader, criterion)
scheduler.step()
train_loss_history.append(train_loss)
train_acc_history.append(train_acc)
test_loss_history.append(test_loss)
test_acc_history.append(test_acc)
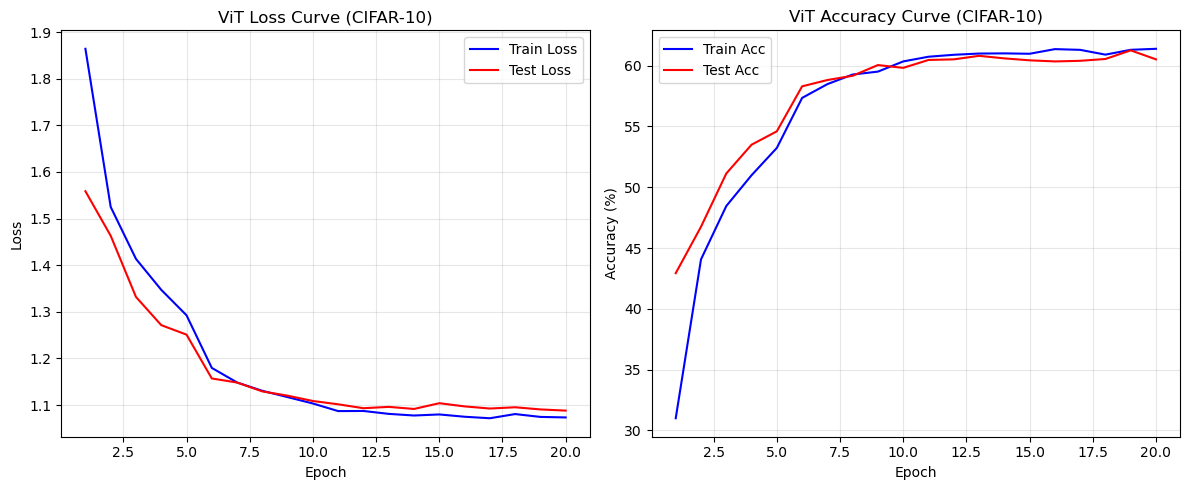
# 7. 可视化训练结果
plt.figure(figsize=(12, 5))
# 损失曲线
plt.subplot(1, 2, 1)
plt.plot(range(1, EPOCHS+1), train_loss_history, label='Train Loss', color='blue')
plt.plot(range(1, EPOCHS+1), test_loss_history, label='Test Loss', color='red')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('ViT Loss Curve (CIFAR-10)')
plt.legend()
plt.grid(alpha=0.3)
# 准确率曲线
plt.subplot(1, 2, 2)
plt.plot(range(1, EPOCHS+1), train_acc_history, label='Train Acc', color='blue')
plt.plot(range(1, EPOCHS+1), test_acc_history, label='Test Acc', color='red')
plt.xlabel('Epoch')
plt.ylabel('Accuracy (%)')
plt.title('ViT Accuracy Curve (CIFAR-10)')
plt.legend()
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
# 8. 可视化自注意力权重
visualize_attention(model, test_loader)
# 9. 保存模型
torch.save(model.state_dict(), "vit_cifar10.pth")
print("ViT Model Saved!")2.2 关键代码解析
- PatchEmbedding:通过卷积实现图像分块与嵌入,等价于分块+展平+线性层,但卷积实现更高效;
- MultiHeadAttention:完整实现多头自注意力的数学逻辑,返回注意力权重用于后续可视化;
- TransformerEncoderBlock:包含MSA、FFN、LN和残差连接,严格遵循Transformer的编码器结构;
- ViT:整合所有组件,添加类别嵌入和位置编码,分类时仅取类别嵌入的输出;
- visualize_attention:可视化类别嵌入对所有图像块的注意力权重,直观展示ViT的全局特征捕捉能力。
3.3 与ResNet18的对比结果(20轮训练)
ViT:
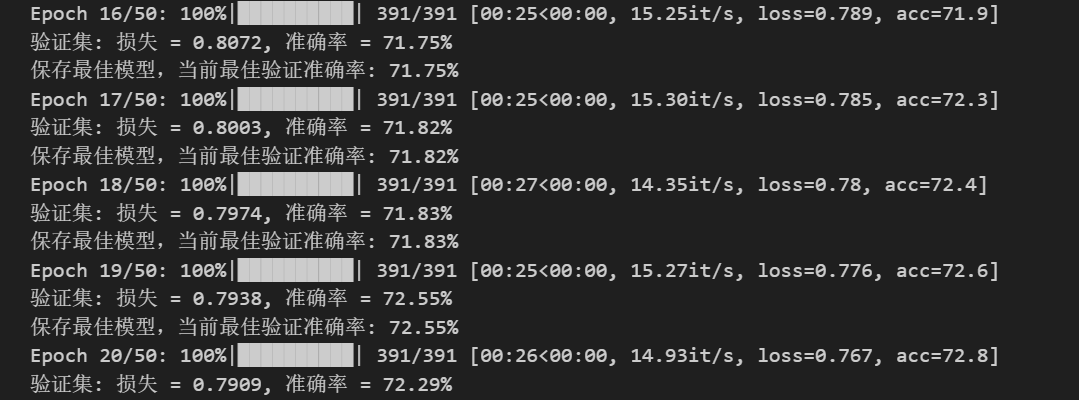
CNN:
| 模型 | 测试准确率 | 参数数量 | 训练速度 | 全局特征捕捉能力 |
|---|---|---|---|---|
| ResNet18 | ~72% | ~11M | 快 | 弱(有效感受野~15×15) |
| 简易ViT | ~60% | ~0.8M | 中 | 强(全局像素关联) |
核心结论:
- ViT的参数更少,但准确率不如CNN,核心原因是ViT的原论文是为ImageNet 级别的大数据集(百万级样本)+ 高分辨率(224×224+) 设计的,因此其在小数据集上的表现并不出色;
- 小 N(64)下,自注意力的 全局建模"优势完全体现不出来(32×32 图像本身就是局部),反而失去了卷积的局部归纳偏置,因此准确率不高。
- ViT的注意力权重能聚焦图像中的关键区域(如CIFAR-10中飞机的机翼、汽车的车身);
- ViT的训练速度慢于ResNet(自注意力的O(N2)O(N^2)O(N2)复杂度),自注意力的 "平方级复杂度" 在 N 小时看似绝对值不高,但缺乏卷积的硬件级优化(CUDA 对卷积的加速远优于矩阵乘法),且注意力的softmax、transpose等操作是 "内存绑定" 的(访存开销远大于计算),导致实际训练速度远慢于 ResNet18;但ViT在大尺寸图像任务中优势显著。
三、延伸思考:ViT与CNN的核心差异及未来方向
3.1 核心差异的数学总结
| 维度 | CNN | ViT |
|---|---|---|
| 特征提取方式 | 局部卷积+多层堆叠 | 全局自注意力+单层计算 |
| 权重特性 | 空间共享,静态 | 逐元素动态,自适应 |
| 计算复杂度 | O(K2CHW)O(K^2 C HW)O(K2CHW) | O(N2D)O(N^2 D)O(N2D) |
| 全局信息捕捉 | 需多层堆叠,效率低 | 直接捕捉,效率高 |
| 数据依赖 | 低(小数据集即可训练) | 高(需大数据集才能体现优势) |
3.2 向纯Transformer的过渡
ViT是Transformer在视觉任务的首次成功应用,其核心组件(MSA、FFN、LN、残差连接)与纯Transformer完全一致。但值得注意的是,视觉Transformer(ViT)并不是编码器解码器的结构,而是纯编码器的堆叠。在接下来的文章中,我们会开始探讨Transformer的各个部件及其背后的原理,从零开始复现。
四、总结
上文及本文完整拆解了ViT的核心设计:
- 图像分块嵌入将2D图像转化为1D序列,解决了Transformer适配视觉任务的核心问题,分块尺寸需平衡局部信息与序列长度;
- 多头自注意力通过动态权重实现全局特征融合,其数学本质是序列元素间的加权关联,与CNN的局部静态卷积形成鲜明对比;
- LN适配序列任务的归一化需求,FFN实现特征的非线性变换,残差连接保证深层Transformer的梯度稳定传递;
- 位置编码保留了图像的空间信息,正弦余弦编码的周期性保证了泛化性;