双 gem5 Host + SimBricks PCIe NIC + Switch的分布式仿真架构:
- 每个 gem5 实例模拟一个主机(Host),内部包含 PCIe Device Adapter,对接外部 SimBricks Adapter。
- SimBricks Adapter 将 gem5 的 PCIe 事务转换为 SimBricks 协议,连接到 NIC 模型。
- 两个 NIC 通过一个中央 Switch 实现网络互联,完成跨主机通信。
dist/:用于在多台物理主机上运行分布式 SimBricks 仿真时的代理。
在分布式系统(Distributed Systems)中,"Proxy" 的核心概念依然是**"代表"** 或**"中介"**。
在这个具体的 SimBricks 仿真场景中,它的作用通常是:
- 通信桥梁:当仿真任务分散在多台物理机器上时,这些机器需要互相交换数据(例如模拟的网络包或硬件信号)。Proxy 进程负责接收本地模拟的数据,并将其转发给远程主机上的其他模拟组件。
- 解耦与抽象:它让本地的模拟模块不需要知道远程机器的具体细节(如IP地址、复杂的网络拓扑),只需要把数据交给本地的 Proxy,由 Proxy 负责后续的传输和处理。
simbricks-runSimBricks 核心启动器是 SimBricks 框架的顶层脚本 / 二进制程序,负责解析配置、管理子进程(如 gem5/NIC/Switch)、协调组件启动顺序和通信,是运行 SimBricks 仿真的入口。
--verbose启用详细日志模式执行时会输出所有组件(gem5 主机、NIC、Switch、Adapter)的实时日志(包括调试信息、通信报文、时序同步数据),默认模式只输出关键错误 / 完成信息,调试时必开。
--force强制覆盖 / 清理旧状态并重新运行1. 清理上一次仿真残留的临时文件(如 socket 套接字、日志文件、进程 pid 文件);2. 忽略 "端口已占用""旧进程未退出" 等非致命提示,强制启动新仿真;3. 避免因前一次仿真异常退出导致的启动失败。
pyexps/simple_ping.py仿真任务的配置脚本路径SimBricks 的仿真逻辑(组件拓扑、参数、workload)都通过 Python 脚本定义,这个文件是官方示例:- 定义了 "两台 gem5 主机通过 SimBricks NIC + Switch 执行 ping 测试" 的完整拓扑;- 内置了组件启动参数、端口映射、时间同步规则等。
simbricks-run --verbose --force pyexps/simple_ping.py- KVM:简单说就是 Linux 系统内置的 "硬件虚拟化加速引擎",能让软件模拟器(比如 gem5/QEMU)直接调用 CPU 的虚拟化指令(如 Intel VT-x/AMD-V),而不是纯软件模拟 CPU 指令,速度能提升几十倍甚至上百倍。
- /dev/kvm:是 KVM 给用户层程序(比如模拟器)提供的 "访问接口"(字符设备文件),模拟器需要读写这个文件才能调用 KVM 加速。
- 传入容器 :如果你的 SimBricks 是跑在 Docker / 容器里的,容器默认隔离了宿主机的设备文件,需要手动把
/dev/kvm映射到容器内,模拟器才能用这个接口。
 SimBricks 里的 gem5 模拟器默认是纯软件模拟 CPU 指令,如果你跑的是 "全系统仿真"(带 Linux 内核),开启 KVM 后,gem5 会把 Guest OS 的非特权指令直接交给宿主机 CPU 执行,不用再逐行翻译,整个仿真的启动速度、网络 ping 测试的响应速度都会大幅提升。
SimBricks 里的 gem5 模拟器默认是纯软件模拟 CPU 指令,如果你跑的是 "全系统仿真"(带 Linux 内核),开启 KVM 后,gem5 会把 Guest OS 的非特权指令直接交给宿主机 CPU 执行,不用再逐行翻译,整个仿真的启动速度、网络 ping 测试的响应速度都会大幅提升。
如果你的 SimBricks 跑在 Docker 容器里,启动容器时加以下参数即可:
启动容器时映射/dev/kvm,并赋予权限
docker run -it --privileged -v /dev/kvm:/dev/kvm 你的-simbricks-image:tag
-
--privileged:赋予容器访问宿主机设备的权限(也可以用--device /dev/kvm更精细); -
-v /dev/kvm:/dev/kvm:把宿主机的/dev/kvm映射到容器内相同路径。 -
容器(Docker):把它想象成一个 "轻量级的独立小电脑"------ 有自己的文件系统、环境、程序,但它不是真的独立操作系统,而是共享宿主机(你真实的电脑 / 服务器)的内核和硬件。
-
跑在容器里的 SimBricks:就是把 SimBricks 的所有依赖(编译好的二进制、gem5、配置文件等)都打包在这个 "小电脑" 里运行,而不是直接装在你的真实系统上。
容器有自己独立的文件系统(相当于一个封闭的文件夹),宿主机的文件默认不在这个文件夹里,容器内的程序看不到。
"映射文件 / 设备到容器内" = 把宿主机的某个文件 / 设备,"链接" 到容器的文件系统里,让容器内的程序能像访问自己的文件一样访问它。
比如 /dev/kvm 是宿主机的 "硬件虚拟化接口",容器内的 SimBricks/gem5 要用到这个接口,就必须把宿主机的 /dev/kvm 映射到容器内的同一个路径(比如 /dev/kvm)。
SimBricks 的 sims/external/qemu 目录通常是通过 git submodule 拉取 QEMU 源码,但构建 Docker 镜像时:
- 要么是没有初始化 submodule ,导致
sims/external/qemu是空目录; - 要么是 submodule 拉取失败,QEMU 源码不完整;
- 要么是 Docker 构建上下文(
build context)没有包含 QEMU 源码目录。
jiake@Super:~/project/simbrick/simbricks$ git submodule update --recursive
jiake@Super:~/project/simbrick/simbricks$ git submodule init
jiake@Super:~/project/simbrick/simbricks$ git submodule status
7e7566532db183cf0000369f1de70939d6a8e2a7 sims/external/bmv2 (heads/main)
ee36df04362b958e0bde8d400aacba48f978a97b sims/external/femu (heads/main)
2c500a6a7527a1305e1a8e03f53ea11e90b71b73 sims/external/gem5 (heads/main)
1ce6dca3b68da284eb0ce4a47f7790d0a0e745d8 sims/external/ns-3 (ns-3.38-55-g1ce6dca3b)
c247fb0c7c5fd4e24b5f08f65857b7bf08ce20fe sims/external/qemu (heads/main)
jiake@Super:~/project/simbrick/simbricks$ cat .git/config | grep -A3 submodule
submodule "sims/external/bmv2"
active = true
url = https://github.com/simbricks/bmv2.git
submodule "sims/external/femu"
active = true
url = https://github.com/simbricks/femu.git
submodule "sims/external/gem5"
active = true
url = https://github.com/simbricks/gem5.git
submodule "sims/external/ns-3"
active = true
url = https://github.com/simbricks/ns-3.git
submodule "sims/external/qemu"
active = true
url = https://github.com/simbricks/qemu.git
SimBricks 的构建逻辑全部定义在项目根目录的 Makefile、docker/rules.mk 等文件中,所有 make 命令的执行都依赖这些规则文件
Linux/Shell 中,命令的输出分两种:
stdout(标准输出,正常日志,对应符号1>);stderr(错误输出,报错信息,对应符号2>)。
格式:命令 > 输出文件路径 simbricks-run --verbose --force pyexps/simple_ping.py > simbricks_output.log
覆盖写入:每次运行清空旧日志,保存新日志
make docker-images &> make_docker_build.log
追加写入:保留旧日志,新日志加在末尾(适合多次调试) make docker-images &>> make_docker_build.log
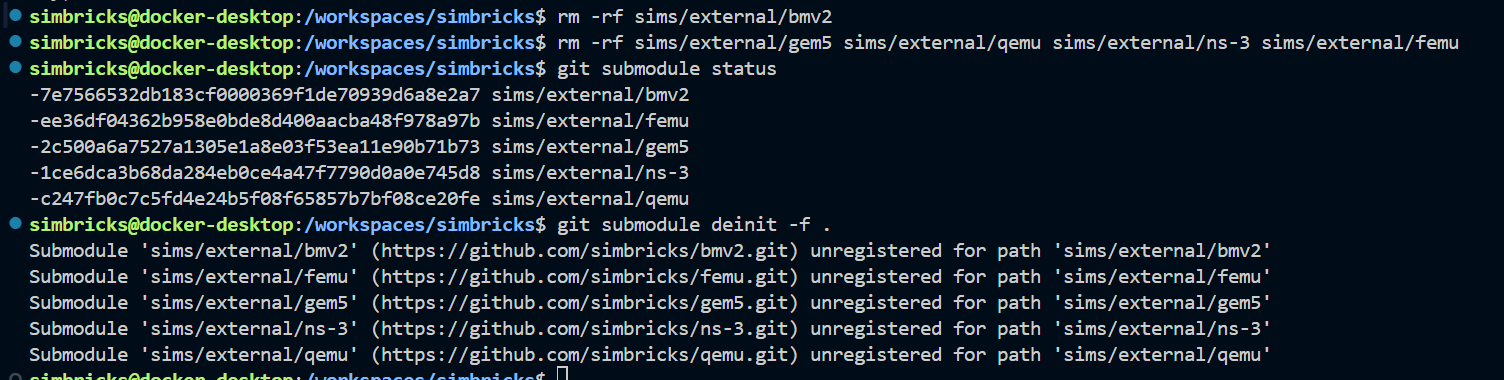
git submodule status 输出开头带 -(如 -c247fb0c7... sims/external/qemu),这是关键信号------ 它表示:
Submodule 已在
.gitmodules中配置,但本地并未实际检出(checkout)源码文件(仅记录了 commit ID,目录为空 / 不完整)。
简单说:
git submodule status带-→ Submodule 未真正初始化(只是 "登记了信息",但没下载源码);- Docker 构建时复制的是 "空的 / 不完整的
sims/external/qemu目录",自然找不到configure脚本
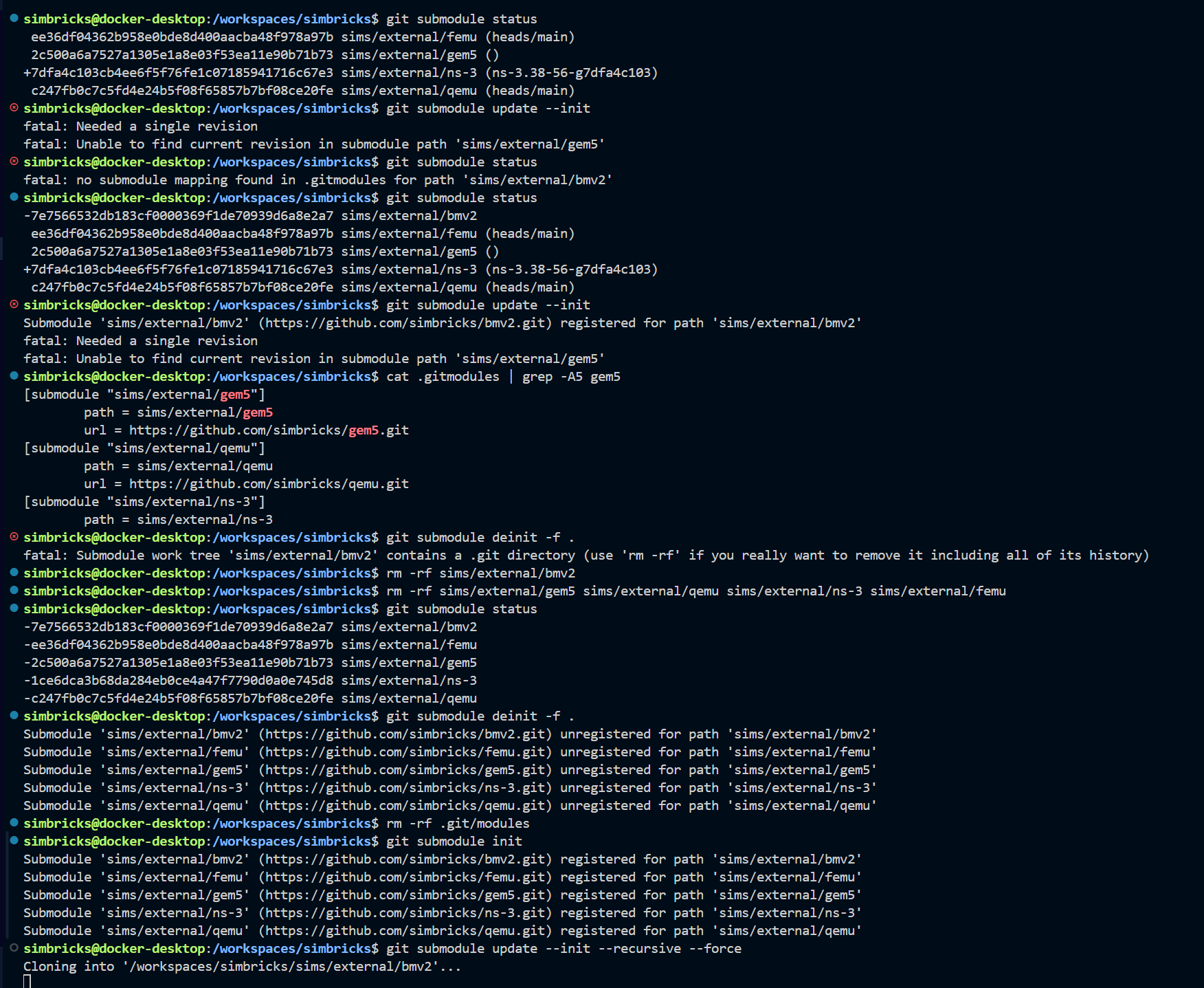
强制清理并重新拉取 QEMU Submodule(核心)
# 进入 SimBricks 项目根目录
cd ~/project/cxl/simbricks
# 1. 取消初始化 QEMU Submodule(清除旧配置)
git submodule deinit -f sims/external/qemu
# 2. 删除本地空的 QEMU 目录
rm -rf sims/external/qemu
# 3. 重新初始化并拉取 QEMU 源码(递归拉取所有依赖)
git submodule update --init --recursive sims/external/qemu
# 4. 验证 Submodule 状态(关键:开头无 `-`)
git submodule status✅ 正常输出示例:c247fb0c7c5fd4e24b5f08f65857b7bf08ce20fe sims/external/qemu (heads/main)(无 - 前缀)。
Project
先通过git submodule update --init拉取外部模拟器模块进项目,然后再依据需求进行编译
安装gem5
make -j16 sims/external/gem5/ready
make -j16 build-images > buildImage.log 2>&1
网络
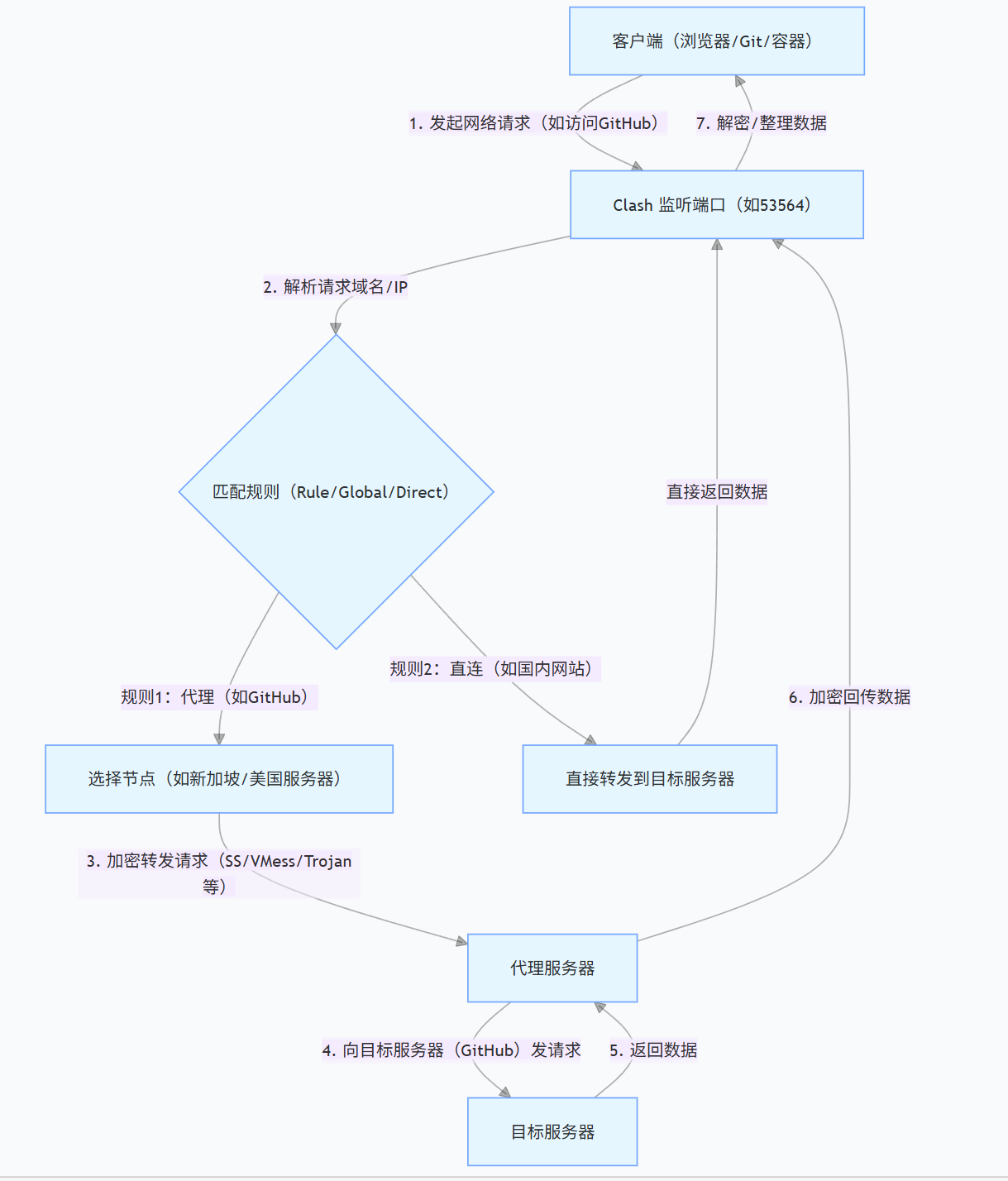
Clash
Clash 本质是本地代理网关,核心作用是 "接管网络请求 → 按规则路由 → 加密转发 → 接收数据并返回"
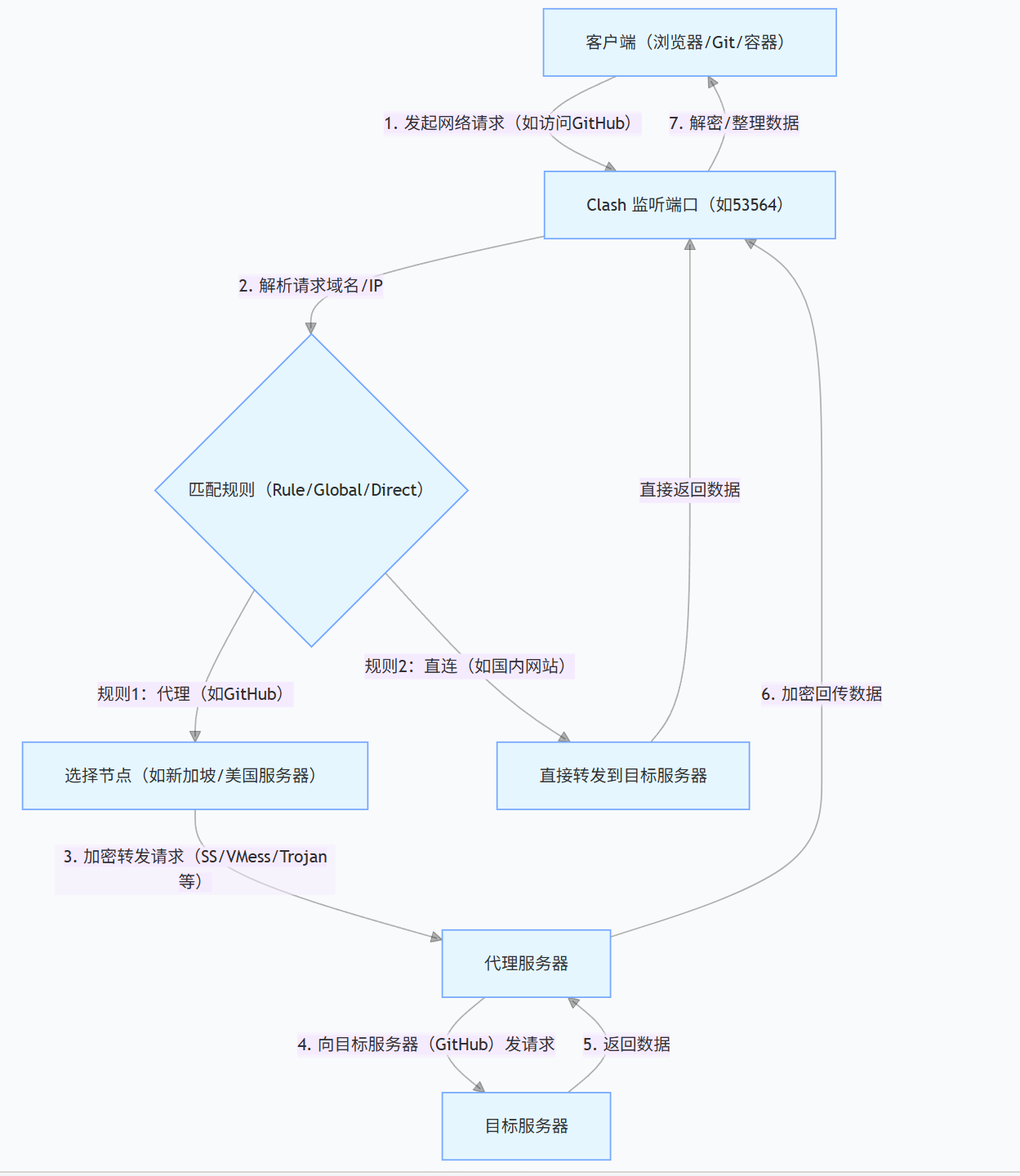
- 监听端口:Clash 会在宿主机本地监听一个端口(如你的 53564),所有配置了代理的程序,都会把请求发到这个端口;
- 规则路由:不是所有请求都走代理(比如访问百度直连,访问 GitHub 走代理);
- 加密转发:Clash 把请求加密后发给远端代理服务器,避免被运营商拦截 / 限速。
Vscode的Docker容器
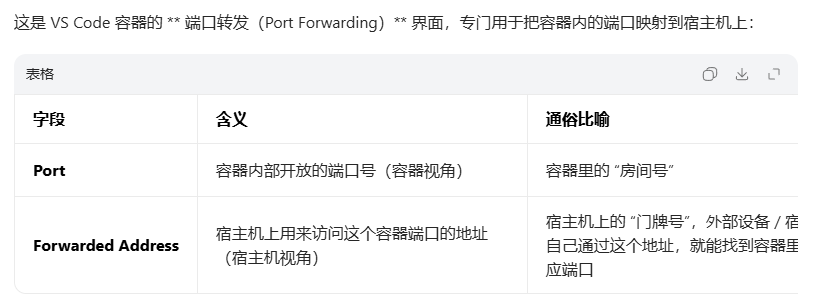
- 容器里的
Port: 46551→ 容器内的服务在46551端口监听 - 宿主机上的
Forwarded Address: 127.0.0.1:64712→ 你在宿主机浏览器里访问127.0.0.1:64712,流量会自动转发到容器的46551端口
端口转发是「容器→宿主机」,不是「宿主机→容器」
- 这个界面只显示容器内端口被转发到宿主机的条目(比如容器里跑了个 Web 服务,要让宿主机访问);
- 你的 Clash 代理
53564是宿主机上的端口,是「宿主机→容器」的方向(容器要访问宿主机的代理),不属于 "容器端口转发" 的范畴,所以不会出现在这个列表里。
Devcontainer
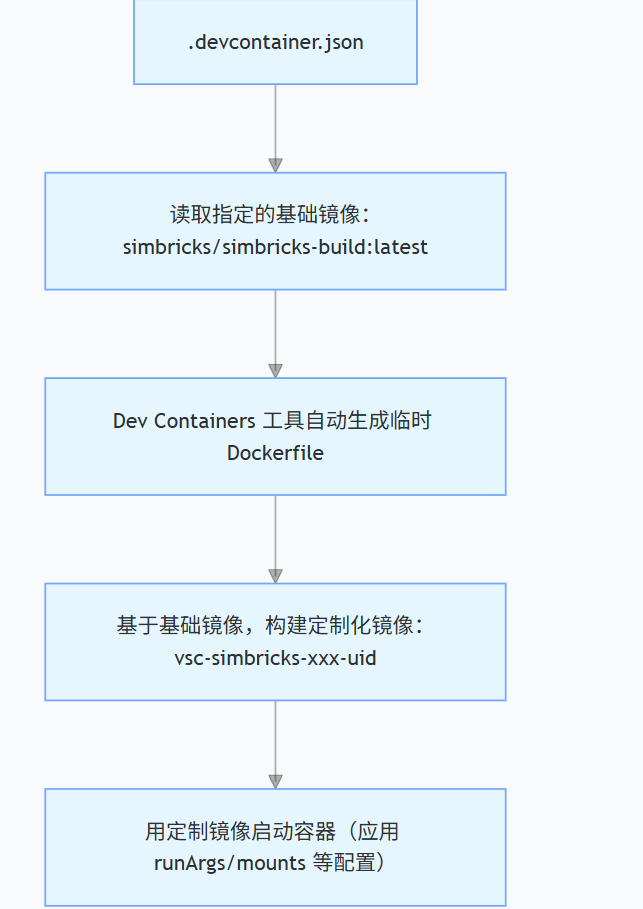
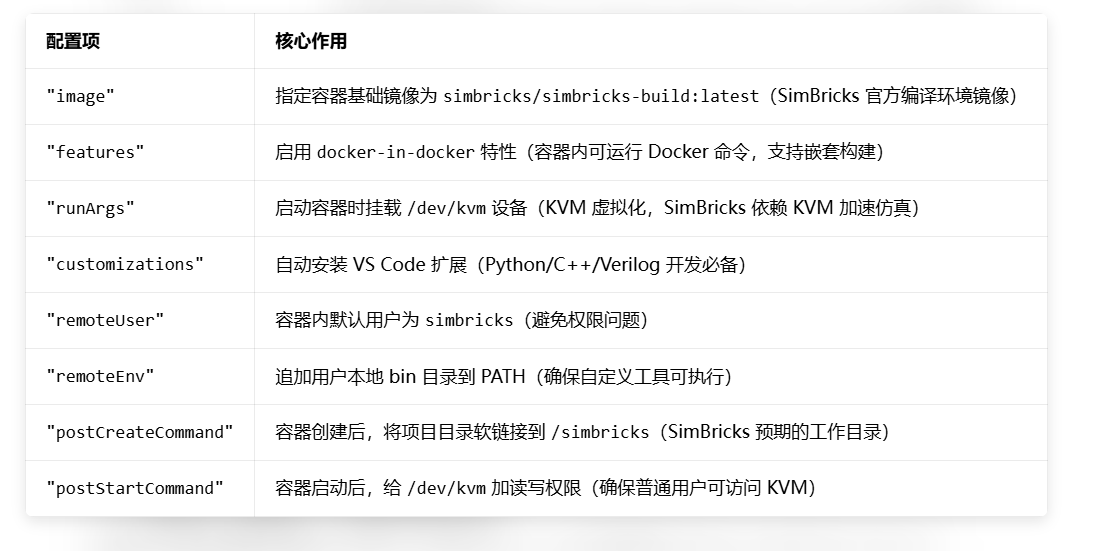
.devcontainer.json不是 "包装出 Image" ,也不是直接用配置里的image启动容器;- 它的逻辑是:基于你指定的基础镜像(
simbricks/simbricks-build:latest),临时构建一个 "定制化镜像"(就是你看到的vsc-simbricks-xxx-uid),再用这个定制镜像启动容器; - 你看到的
vsc-simbricks-xxx-uid:latest是 VS Code Dev Containers 工具自动构建的中间定制镜像,而非你配置里的原始基础镜像。
devcontainer自身就会产生一个中间的Image镜像
- 基础镜像 :你配置里的
image: "simbricks/simbricks-build:latest"(原始镜像,只读); - 定制镜像 :
vsc-simbricks-xxx-uid:latest(Dev Containers 自动构建,包含你的个性化配置:安装 docker-compose 插件、创建软链接、调整权限等); - 容器:最终运行的是这个定制镜像的实例。

- 原始镜像只读 :你配置里的
simbricks/simbricks-build:latest是只读的,无法直接把postCreateCommand等操作写入; - 配置需要固化 :
apt install docker-compose-plugin、ln -s等操作需要在镜像层中固化,否则每次启动容器都要重新执行,效率低; - 用户权限适配 :
remoteUser: simbricks和 UID/GID 调整(-uid后缀的由来)需要修改镜像的用户配置,因此必须构建新镜像; - 简化使用:工具自动处理镜像构建,你只需要写配置,无需手动写 Dockerfile。
- 你运行
.devcontainer.json时,Dev Containers 工具会:- 检查是否已有对应的定制镜像(
vsc-simbricks-xxx-uid); - 如果没有,就基于基础镜像构建(这就是你在 Docker 终端看到这个镜像的原因);
- 用这个定制镜像启动容器,应用
runArgs/mounts等运行时配置;
- 检查是否已有对应的定制镜像(
- 这个定制镜像的命名规则是:
vsc-<项目名>-<随机哈希>-uid,其中uid是为了适配宿主机 / 容器的用户 UID 一致性(避免权限问题)。
核心逻辑:基础镜像 → 定制镜像 → 容器,而非直接用基础镜像启动容器。
网络相关
- 不会重新构建定制镜像 (
vsc-simbricks-xxx-uid):镜像的构建只和image、postCreateCommand、remoteUser等 "镜像层配置" 相关,--network=host是容器运行时参数(不写入镜像层); - 会重新创建容器 :修改
runArgs后,VS Code 会停止旧容器,用 "原定制镜像 + 新的运行时参数(--network=host)" 启动新容器(镜像不变,容器是新的)
要让 Dev Container 创建的容器直接使用宿主机网络栈,只需在 .devcontainer.json 的 runArgs 中添加 --network=host 参数即可。
核心原因:--network=host 不解决「GitHub 访问链路」问题
虽然你配置了 --network=host 让容器复用宿主机网络,但容器内拉取 Git 子模块慢的核心问题不是「网络隔离」,而是:GitHub 本身对国内网络的访问带宽限制 / 链路拥堵 (即使宿主机能访问,也可能是 "能通但极慢"),--network=host 只是让容器走宿主机的网络栈,无法改变「GitHub 国际链路慢」的本质。
补充:你可能的误解
--network=host 仅保证:
- 容器和宿主机 "走同一个网络出口"(比如同一个路由器、同一个代理);
- 但如果宿主机访问 GitHub 本身就慢(比如无代理、直连国际链路),容器也会同步这个 "慢",而非提速
为什么宿主机能访问但容器仍慢?(常见诱因)
1. 宿主机的代理未同步到容器(最常见)
宿主机可能通过代理访问 GitHub(速度快),但容器虽然共享宿主机网络,却未配置代理环境变量,导致容器仍直连 GitHub(慢):
- 宿主机代理是 "进程级配置",而非 "系统级转发",容器不会自动继承;
- 即使
--network=host,容器内也需手动配置代理才能复用宿主机的代理。
Docker
Docker 的核心是 dockerd(Docker 守护进程),所有 docker build/docker run 命令都是通过 /var/run/docker.sock(Docker 套接字)和 dockerd 通信的。
挂载套接字 就是把宿主机的 /var/run/docker.sock 文件映射到容器内,让容器里的 docker 命令直接和宿主机的 dockerd 通信 ------ 容器内只有 docker 客户端,没有 dockerd 服务
-v 是 docker run 命令的参数,全称是 --volume(卷),核心作用是:将宿主机的文件 / 目录,挂载(映射)到容器内的指定位置,实现宿主机和容器之间的文件双向同步。
你可以把它理解成:给容器开一个 "窗口",直接访问宿主机的文件 / 目录。
-v <宿主机路径>:<容器内路径>
<宿主机路径>:必须是绝对路径 (如/var/run/docker.sock);<容器内路径>:也必须是绝对路径;- 两者用冒号
:分隔,不能有空格。
"runArgs": "-v", "/var/run/docker.sock:/var/run/docker.sock"
这两种写法最终实现的效果完全一致 (都是把宿主机 /var/run/docker.sock 挂载到容器内同路径),只是语法形式不同:
- 第一种用
.devcontainer.json原生的mounts字段(结构化配置); - 第二种用
runArgs传递docker run -v参数(命令行参数形式)。
两者本质都是 Docker 的绑定挂载(bind mount)
Image
- 镜像(Image)本身确实是只读的,不能改、不能运行。
- Docker Desktop 里给镜像加的 "启动 / 暂停" 按钮,并不是在操作镜像,而是:一键用这个镜像,新建并启动一个容器。
- 界面上写的是对镜像的操作,但实际动作是:基于镜像 → 新建容器 → 启动容器。
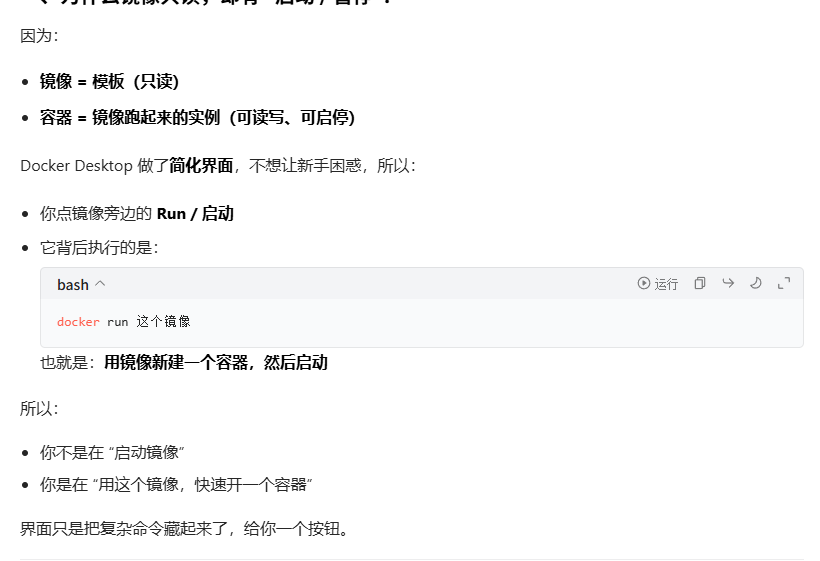
Docker Desktop 里镜像的 Actions 一般包括:
- Run:运行(新建容器)
- Pull:拉取(从仓库下载更新)
- Push:推送到仓库
- Tag:打标签(改名)
- Delete:删除镜像
- View details:看层信息
VSCODE+DOCKER
在 VS Code 中通过 Ctrl+Shift+P 打开 Dev Container 后,VS Code 内置的终端(Terminal)直接就是容器内的终端(准确来说是容器内的 shell 会话),而非宿主机的终端
# 1. 查看当前主机名(容器 ID)
hostname
# 结果:一串随机字符(如 b4618f36007f),和 Docker 容器 ID 一致,而非宿主机名
# 2. 查看当前进程的 cgroup(容器隔离标识)
cat /proc/1/cgroup
# 结果:包含 docker 相关路径(如 /docker/xxx),宿主机执行则无此内容
# 3. 查看 Docker 容器列表(容器内执行会调用宿主机 Docker,但自身是容器)
docker ps
# 结果:能看到当前运行的 Dev Container 容器(自身),证明在容器内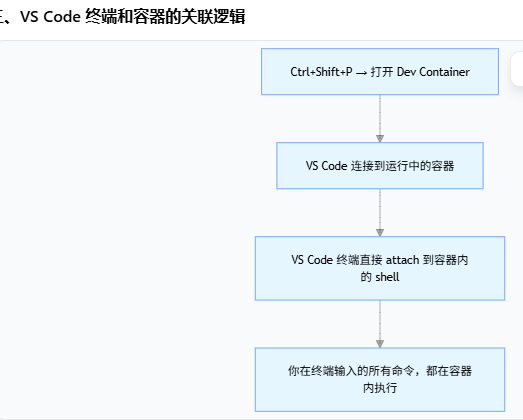

容器内网络
容器内拉取 Git 子模块的网络情况
容器启动后执行 git submodule update --init 时,网络走的是容器自身的网络栈(而非宿主机直接代理):
- 容器默认使用 Docker 网桥网络(IP 段通常是
172.17.0.0/16); - 容器的 DNS、代理、MTU 等网络配置独立于宿主机;
- 你遇到的 "拉取慢 / 中断",本质是容器内访问 GitHub 的网络链路不稳定(DNS 解析慢、带宽受限、HTTP/2 协议兼容性差等)。
- 网络配置优先在容器内修改(无需重新构建定制镜像,即时生效);
- 若要永久生效,可修改
.devcontainer.json让配置自动注入,下次启动容器时无需重复改; - 不需要重新构建定制镜像(网络配置是容器运行时属性,而非镜像层属性)。
DIND

Simbrick
采用使用宿主机的方式,不再安装docker in docker
- 原来的 DinD(Docker in Docker):你在出租屋里(容器),自己买了一套完整的厨房设备(独立 Docker 环境),自己做饭(跑容器 / 建镜像);
- 挂载套接字:你在出租屋里,不买厨房设备,直接通过墙上的管道(套接字)用房东家(宿主机)的厨房做饭,做完的饭(镜像 / 容器)也留在房东家。
Docker 的核心是 dockerd(Docker 守护进程),所有 docker build/docker run 命令都是通过 /var/run/docker.sock(Docker 套接字)和 dockerd 通信的。
example2分布式TCP代理
把仿真组件拆分到两个 Fragment(物理机 / 进程组),并通过 TCP 代理实现跨 Fragment 的时序同步和数据通信。
example1同一网络下双主机PCIE连结,单机部署
# 1. 导入 SimBricks 核心模块
# 实例化模块:负责定义仿真组件的部署方式(比如 Fragment)
from simbricks.orchestration import instantiation as inst
# 仿真模块:负责定义仿真逻辑和模拟器类型(比如 QemuSim、I40eNicSim)
from simbricks.orchestration import simulation as sim
# 系统模块:负责定义核心仿真对象(主机、网卡、交换机、磁盘等)
from simbricks.orchestration import system
# 实例化辅助工具:提供简化实例化的函数(比如 simple_instantiation)
from simbricks.orchestration.helpers import instantiation as inst_helpers
# 仿真辅助工具:提供简化仿真配置的函数(比如 simple_simulation)
from simbricks.orchestration.helpers import simulation as sim_helpers
# 2. 创建系统根对象
# sys 是整个仿真系统的"总容器",所有组件(主机、网卡、交换机)都要挂载到这个对象下
sys = system.System()
# 3. 创建基础磁盘镜像
# DistroDiskImage:SimBricks 预定义的 Linux 发行版磁盘镜像(比如 Ubuntu/CentOS)
# 参数 "base" 表示使用默认的基础镜像(需提前通过 SimBricks 脚本构建)
distro_disk_image = system.DistroDiskImage(sys, "base")
# 4. 创建第一台主机(host0)
# 注释掉的 CorundumLinuxHost 是另一种网卡(Corundum)的主机模型,这里改用 I40E 网卡
# I40ELinuxHost:使用 Intel I40E 网卡驱动的 Linux 主机(Full System 全系统仿真)
# host0 = system.CorundumLinuxHost(sys)
host0 = system.I40ELinuxHost(sys)
# 给 host0 挂载基础磁盘镜像(系统盘)
host0.add_disk(distro_disk_image)
# 给 host0 挂载 Linux 配置磁盘镜像(用于自动配置 IP、网关等网络参数)
host0.add_disk(system.LinuxConfigDiskImage(sys, host0))
# 5. 创建第一块网卡(nic0)并挂载到 host0
# IntelI40eNIC:模拟 Intel I40E 万兆网卡
nic0 = system.IntelI40eNIC(sys)
# 给 nic0 分配 IPv4 地址 10.0.0.1/24(默认子网掩码 255.255.255.0)
nic0.add_ipv4("10.0.0.1")
# 通过 PCIe 总线将 nic0 挂载到 host0(模拟物理机插网卡的过程)
host0.connect_pcie_dev(nic0)
# 6. 创建第二台主机(host1)(和 host0 配置完全对称)
host1 = system.I40ELinuxHost(sys)
# 挂载相同的基础磁盘镜像
host1.add_disk(distro_disk_image)
# 挂载配置磁盘镜像
host1.add_disk(system.LinuxConfigDiskImage(sys, host1))
# 7. 创建第二块网卡(nic1)并挂载到 host1
nic1 = system.IntelI40eNIC(sys)
# 分配 IP 地址 10.0.0.2/24(和 host0 同网段)
nic1.add_ipv4("10.0.0.2")
# PCIe 挂载到 host1
host1.connect_pcie_dev(nic1)
# 8. 创建以太网交换机(switch0)并连接两台主机的网卡
# EthSwitch:模拟二层以太网交换机(无 IP,仅转发帧)
switch0 = system.EthSwitch(sys)
# 将 nic0 的以太网接口连接到 switch0
switch0.connect_eth_peer_if(nic0._eth_if)
# 将 nic1 的以太网接口连接到 switch0
switch0.connect_eth_peer_if(nic1._eth_if)
# 9. 配置主机上运行的应用程序
# 给 host0 配置 Ping 客户端:目标是 nic1 的 IP(10.0.0.2)
ping_client_app = system.PingClient(host0, nic1._ip)
# wait=True:表示仿真会等待 ping 完成后再结束(否则可能主机还没启动就退出)
ping_client_app.wait = True
# 将 ping 应用添加到 host0 的启动项中(主机启动后自动运行 ping 10.0.0.2)
host0.add_app(ping_client_app)
# 给 host1 配置无限睡眠应用:让 host1 一直运行(不退出),以响应 host0 的 ping
host1.add_app(system.Sleep(host1, infinite=True))
# 10. 定义仿真器映射(指定每个组件用什么模拟器运行)
# simple_simulation:简化的仿真配置函数,返回一个 Simulation 对象
simulation = sim_helpers.simple_simulation(
sys, # 传入系统总容器
# compmap:组件类型 → 模拟器类型的映射
compmap={
# 所有 FullSystemHost(包括 I40ELinuxHost)用 QemuSim 模拟器(QEMU 全系统仿真)
system.FullSystemHost: sim.QemuSim,
# Intel I40E 网卡用 I40eNicSim 模拟器(专门的网卡仿真器)
system.IntelI40eNIC: sim.I40eNicSim,
# 以太网交换机用 SwitchNet 模拟器(SimBricks 轻量级交换机仿真器)
system.EthSwitch: sim.SwitchNet,
},
)
# 11. 定义实例化配置(部署方式)
# simple_instantiation:简化的实例化配置函数,返回 Instantiation 对象
instantiation = inst_helpers.simple_instantiation(simulation)
# 创建一个 Fragment(部署单元):所有组件都放在这个 Fragment 里
fragment = inst.Fragment()
# 将仿真中所有模拟器(QEMU、I40eNicSim、SwitchNet)添加到这个 Fragment
fragment.add_simulators(*simulation.all_simulators())
# 将 Fragment 赋值给实例化配置(表示所有组件部署在同一个 Fragment/物理机)
instantiation.fragments = [fragment]
# 12. 最终输出实例化列表(供 SimBricks 调度器读取,启动仿真)
instantiations = [instantiation]system.System()是 "根",所有硬件组件(主机、网卡、交换机)都属于这个系统;simulation是 "逻辑层",定义每个组件用什么模拟器运行;instantiation是 "部署层",定义模拟器在哪个 Fragment(物理机)上运行。
隐藏的关键逻辑:
LinuxConfigDiskImage会自动给主机配置网卡 IP、路由,无需手动在系统内配置;connect_pcie_dev(nic)不仅是 "挂载网卡",还会自动建立主机和网卡之间的 PCIe 通信通道;connect_eth_peer_if会自动建立网卡和交换机之间的以太网帧传输通道。
运行逻辑:当你执行这段配置后,SimBricks 会:
-
启动 QEMU 运行 host0 和 host1;
-
启动 I40eNicSim 运行 nic0 和 nic1;
-
启动 SwitchNet 运行 switch0;
-
所有组件在同一个进程组 / 物理机内时序同步运行;
-
host0 启动后自动 ping 10.0.0.2,host1 一直运行以响应 ping。
-
构建一个双主机 + 交换机的网络仿真系统,通过 QEMU 模拟主机、专用模拟器模拟网卡 / 交换机,实现 ping 连通性验证;
-
代码分为三层:硬件组件定义 → 模拟器映射 → 部署方式配置;
-
所有组件部署在同一个 Fragment 中,保证时序同步,确保仿真逻辑的时间一致
Fragment
在 SimBricks 中,Fragment 是模拟器实例的部署单元,你可以把它理解成:
-
一个「容器 / 进程组」,或者「一台物理机 / 虚拟机」
-
所有被加入同一个
Fragment的模拟器(QEMU Host、NIC、Switch),会被调度在同一台物理机器上启动和运行 -
不同
Fragment可以部署在不同物理机上(分布式仿真),而你代码中fragments = [fragment]表示所有组件都在一个 Fragment 里(单机部署)。fragment = inst.Fragment()
把所有模拟器(QEMU、NIC、Switch)都加入同一个 Fragment
fragment.add_simulators(*simulation.all_simulators())
instantiation.fragments = [fragment] # 仅一个 Fragment
仿真的核心问题是「时间一致性」------ 不同模拟器(比如 QEMU 模拟主机、NIC 模拟网卡、Switch 模拟交换机)必须基于统一的时间轴运行,否则会出现:
- 主机发了一个数据包,但网卡还没 "走到" 对应的时间点,导致数据包丢失
- 交换机转发延迟计算错误,出现 "未来的包先到" 的逻辑错误
SimBricks 的时序同步分为两种级别,核心差异在 Fragment 部署方式:
| 部署方式 | 同步机制 | 精度 / 效率 |
|---|---|---|
| 同一 Fragment(单机) | 基于共享内存 + 全局时间锁:所有模拟器运行在同一台机器,通过共享内存交换时间戳,由一个核心进程统一控制 "时间步进"(比如所有模拟器都必须走完 100ns,才能进入下一个 100ns) | 精度高(纳秒级)、延迟低 |
| 不同 Fragment(分布式) | 基于网络通信 + 时间戳同步:不同机器的模拟器通过网络传递时间信息,需要做网络延迟补偿,同步逻辑更复杂 | 精度略低、有网络开销 |
你的代码中所有组件在同一个 Fragment,因此能直接使用最高精度的「共享内存全局时间同步」,确保 QEMU 主机、I40E 网卡、Switch 交换机的时间轴完全一致:
- 当
host0(QEMU)在时间 T 发送一个 ping 包时,nic0(I40E NIC)会在同一时间 T 接收并处理 switch0(Switch)会在时间 T + 转发延迟 处理这个包,nic1会在对应时间接收,最终host1会在正确的时间响应
容器相关
⚠️ warning: redirecting to https://gitlab.com/... → 只是 Git 仓库地址重定向(从 qemu.org 跳转到 gitlab.com),非错误,不影响拉取。
本地加载的 Submodule 是否进入 Docker 容器,取决于Docker 构建上下文 和COPY/ADD 指令,和 "本地是否加载 Submodule" 无直接关联(但本地状态会影响构建上下文)。
simbricks/simbricks-build:latest 镜像中预装了 SimBricks 编译运行的所有依赖,本地默认没有,需要手动安装
容器通过 --device=/dev/kvm 和 postStartCommand 配置了 KVM 访问,但本地需要手动满足:
-
❌ 本地缺失 1:未确认 KVM 硬件支持(SimBricks 依赖 KVM 加速 QEMU 仿真);
-
❌ 本地缺失 2:普通用户无
/dev/kvm读写权限(默认只有 root 可访问); -
❌ 本地缺失 3:未加载 KVM 内核模块(部分系统默认未启用)。
-
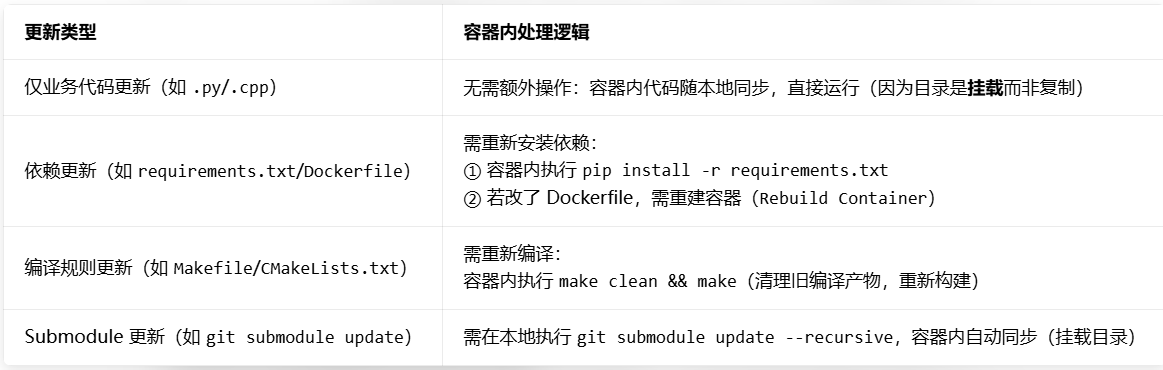
✅ 代码更新:Git 上传 / 拉取仍在本地执行(容器内操作最终也同步到本地);
-
⚠️ 运行适配:代码更新后,容器环境可能需要重新编译 / 安装依赖(如新增依赖、修改编译规则);
-
❌ 容器本身:代码更新不会自动修改容器镜像,需手动触发 "环境重建"。
容器对 "上传" 的影响
- 无负面影响 :Git 是分布式版本控制,代码的提交 / 推送本质是操作本地
.git仓库,容器只是 "运行代码的环境",不改变 Git 核心逻辑; - 正向作用:可先在容器内验证修改后的代码是否能编译 / 运行(容器环境和团队一致,避免 "本地能跑、远程跑不了");
- 注意点 :
- 如果修改了
requirements.txt/Dockerfile/Makefile等 "环境相关文件",需在容器内验证环境适配(如make clean && make),再提交代码; - 容器内的代码修改会实时同步到本地(因为 Dev Container 通常挂载本地目录到容器),无需手动复制。
- 如果修改了

环境一致性:消除 "环境不一致导致的迭代问题"
- 无容器:团队成员本地环境不同(如 GCC 版本、依赖库版本),代码更新后可能 "你能跑、我跑不了";
- 有容器:所有人使用相同的
simbricks/simbricks-build镜像,代码更新后,只要容器内验证通过,团队其他成员拉取后也能直接运行(仅需同步代码,无需适配环境)。
-
容器是 "无状态" 的:容器内的代码修改会同步到本地(挂载目录),但如果删除容器,容器内的临时编译产物会丢失(需重新编译);
-
核心保障:代码更新必须通过 Git 提交(本地 / 容器内提交均可),否则容器删除后修改会丢失。
-
Reopen in Container 过程的日志保存:需通过 VS Code 终端重定向或 Docker 日志命令捕获;
-
容器内日志的保存位置 :
- 若保存到挂载的本地目录 → 退出容器后本地可直接查看;
- 若保存到容器内非挂载目录 → 退出容器后本地无法查看(需手动拷贝);
-
Dev Container 默认会将本地项目目录挂载到容器内,因此容器内保存到项目目录的日志,本地可直接访问。
VS Code 的 "Reopen in Container" 本质是调用 docker run 等命令
镜像是容器的 "模板 / 只读蓝图",容器是镜像的 "可运行实例" ------ 类比理解:
- 镜像 = 手机 App 的安装包(只读、不可运行,包含运行所需的所有代码 / 依赖 / 配置);
- 容器 = 安装后正在运行的 App(可读写、独立运行,基于安装包创建,多个实例可同时运行)。

- 镜像:只读、不可修改、可重复使用 ,包含运行程序的所有环境(如 SimBricks 的
simbricks-build:latest镜像包含 GCC、依赖库、Python 包等); - 容器:可读写、独立运行、生命周期可控(启动 / 停止 / 删除),基于镜像创建,运行时会在镜像的只读层上添加一层 "可写层",所有修改都在可写层(删除容器后,可写层消失,镜像不变)。

docker in docker
features/src/docker-in-docker at main · devcontainers/features
Docker in Docker = 在 Docker 容器里面,再运行一个完整的 Docker 环境 也就是:容器套容器。
- 外面一层:宿主机器上的 Docker
- 里面一层:容器内部又装了 Docker 服务,可以自己建镜像、跑容器
就像:
电脑里开虚拟机 → 虚拟机里再开一个虚拟机
真正的 Docker in Docker(DinD)
- 容器内部独立运行一个全新 dockerd 进程
- 有自己的镜像、容器存储
- 和宿主机 Docker 完全隔离
- 缺点:性能差、权限高、不稳定
② Docker from Docker(挂载方式,更常用)
plaintext
-v /var/run/docker.sock:/var/run/docker.sock- 容器里用的还是宿主机的 Docker
- 只是把控制接口映射进去
- 更轻、更快、更稳定
报错
1
官方文档里 {"ghcr.io/devcontainers/features/docker-in-docker:2": {}} 的写法是语法正确的,但你遇到的报错是 "配置参数的默认值适配问题" + "网络访问失败" 的双重问题,和写法无关。
报错 1:Invalid compose_version value: 2 ------ 是 "参数名误解" 导致的误判
你看到的报错里 Invalid compose_version value: 2,不是你写的配置错了,而是:
- Dev Container 安装 DinD 特性时,内部脚本会读取
dockerDashComposeVersion参数(官方文档里的选项名),而非compose_version; - 你的配置里没显式指定
dockerDashComposeVersion,脚本会用默认值v2(这本身是对的); - 真正的问题是:网络失败导致脚本提前终止,返回了错误的参数提示 (脚本没拿到正确的参数值,误报
compose_version=2无效)。
简单说:compose_version 是报错信息的 "伪因",核心是网络问题导致脚本没正常读取默认参数。
DinD 特性安装脚本需要:
- 从 GitHub 拉取 Docker Compose、Buildx 等组件;
- 验证 TLS 证书、建立 HTTPS 连接;
你的环境中:
- 容器内访问 GitHub 时 TLS 连接超时 / 中断(网络不稳定、DNS 解析失败、证书过期等);
- 脚本下载组件失败 → 后续参数校验逻辑混乱 → 抛出错误的
compose_version提示; - 最终 DinD 特性安装失败,Dev Container 启动终止。
simbricks/simbricks-build:latest 镜像可能:
- 预装了部分 Docker 组件(如 moby),和 DinD 特性的安装脚本冲突;
- 镜像内的 CA 证书过期,导致 TLS 连接验证失败;
- 镜像的网络配置(如 DNS)未适配 DinD 特性的网络访问需求。
虽然官方默认写法没错,但显式指定参数可避免脚本误判,修改 .devcontainer.json:
"features": { "ghcr.io/devcontainers/features/docker-in-docker:2": { "dockerDashComposeVersion": "v2", // 显式指定 Compose 版本 "moby": true, // 用 Moby 替代 Docker CE(适配镜像) "azureDnsAutoDetection": false // 关闭 Azure DNS 自动检测(非 Azure 环境) }
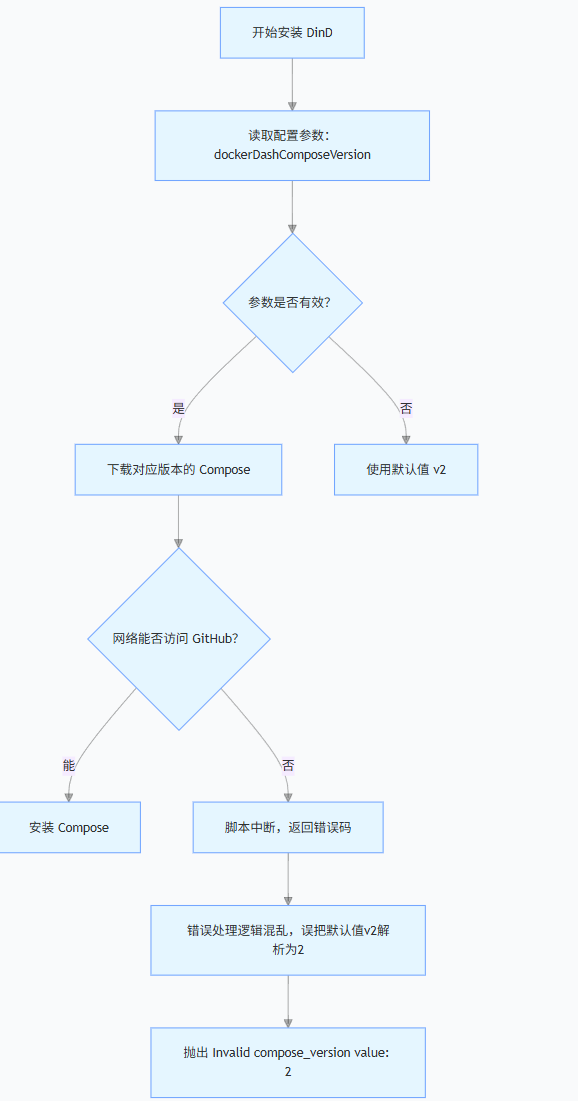
graph TD A开始安装 DinD --> B读取配置参数:dockerDashComposeVersion B --> C{参数是否有效?} C -- 是 --> D下载对应版本的 Compose C -- 否 --> E使用默认值 v2 D --> F{网络能否访问 GitHub?} F -- 能 --> G安装 Compose F -- 否 --> H脚本中断,返回错误码 H --> I错误处理逻辑混乱,误把默认值v2解析为2 I --> J抛出 Invalid compose_version value: 2
脚本中 dockerDashComposeVersion 的有效值是 v2/v1/none,但网络失败时:
- 脚本下载 Compose 失败 → 内部变量解析逻辑中断;
- 脚本的 "错误兜底代码" 会把
v2截断为2(去掉前缀v); - 而脚本的参数校验逻辑只认
v2/v1/none,不认纯数字2→ 抛出 "2无效" 的错误。
简单说:v2 是合法值,但脚本中断后把 v2 变成了 2,2 是非法值 → 报错指向 2。
因为 Compose 是 DinD 安装脚本的 "核心依赖",脚本执行顺序决定了:
-
DinD 安装的第一步是 "配置 Docker Engine",第二步就是 "安装 Docker Compose";
-
网络访问 GitHub 主要是为了下载 Compose、Buildx 等组件,而 Compose 是第一个需要网络下载的核心组件;
-
网络失败会最先卡在 "下载 Compose" 环节 → 脚本中断在 Compose 版本校验步骤 → 必然报 Compose 版本错误,而非其他字段(如
moby/buildx)。


moby: true→ 解决 "容器内装 Docker CE 太重、易冲突" 的问题;azureDnsAutoDetection: false→ 解决 "非 Azure 环境下 DNS 配置错误" 的问题;- 两者结合,都是为了让 DinD 在你的本地环境更稳定,避免和 SimBricks 基础镜像冲突。
2
你之前把 -v 和路径写在同一个字符串里("-v /var/run/docker.sock:/var/run/docker.sock"),JSON 解析后会变成:
docker run "-v /var/run/docker.sock:/var/run/docker.sock" ...Docker 会把整个带空格的字符串当成 "卷名",而非 "参数 + 路径",卷名不允许开头有空格,因此报错。
修正后拆分成两个字符串("-v", "/var/run/docker.sock:/var/run/docker.sock"),解析后是:
docker run -v /var/run/docker.sock:/var/run/docker.sock ...Docker 能正确识别 -v 是参数,后面的路径是挂载目标,因此正常工作。
其他
1 KiB/s = 1024 字节/秒;1 MiB = 1024 KiB;
多数代理 / 路由器的 TCP 连接超时时间是 1-5 分钟,超过后会主动关闭连接,导致 "下到一半断了";
5.86 MiB= 已下载的代码大小;13.00 KiB/s= 当前下载速度(极慢,是断连的核心原因);- 解决思路:用浅克隆减少传输量,或切换更快的 Clash 节点提升速度
# 容器内执行,先配置这些参数(解决小数据包断连)
git config --global core.compression 0 # 关闭压缩,减少数据包解码错误
git config --global http.postBuffer 1048576000 # 增大缓存到 1G,适配大文件
git config --global http.maxRequestBuffer 100M # 增大请求缓存
git config --global http.keepAlive true # 开启持久连接,避免频繁握手断连
git config --global http.lowSpeedLimit 0 # 关闭低速限流(避免误判超时)
git config --global http.lowSpeedTime 999999 # 延长超时时间- 浅克隆(--depth 1):只拉最新提交的代码,数据量从 14069 个对象降到几百个,大幅降低断连概率;
- 增大缓存 + 关闭压缩:避免 Git 因 "缓存不足 / 压缩解码错误" 主动终止连接;
- 延长超时时间:给网络传输留足缓冲,避免代理 / 路由器提前掐断连接
OMNeT++
- 全称:Objective Modular Network Testbed in C++
- 是什么 :它是一个离散事件仿真框架。你可以把它理解为一个"底座"或"引擎",专门用来模拟网络系统。它提供了图形用户界面、底层调度机制和模块化架构,但它本身并不包含具体的网络协议实现。
INET
- 是什么 :它是 OMNeT++ 的核心模型库。如果说 OMNeT++ 是操作系统,INET 就是上面的"应用程序"。它实现了各种标准的网络协议(如 TCP/IP, UDP, Ethernet, WiFi 等)。
- 作用:如果你想用 OMNeT++ 仿真一个路由器或交换机,你不能从零开始写代码,而是直接使用 INET 里已经写好的模块(比如现成的 TCP 协议栈)。
SimBricks 的主要目的是将不同的模拟器(如 gem5 用于 CPU,Verilator 用于硬件,ns-3 用于网络)连接起来进行协同仿真。
这句话的提出者希望将 OMNeT++/INET 也集成进来,原因可能包括:
- 更丰富的网络模拟:虽然 SimBricks 已经支持 ns-3 进行网络仿真,但 OMNeT++/INET 在某些特定的网络协议细节或图形化分析上可能具有优势。
- 统一构建流程 :目前可能需要手动去下载和编译 OMNeT++,这句话要求将其纳入主仓库(可能是作为子模块),并添加类似
make omnetpp这样的命令,让用户能像构建 QEMU 或 gem5 一样方便地构建它。
Corundum 指的是一个开源的高性能 FPGA 网络接口卡(NIC)项目。
它由加州大学圣地亚哥分校(UCSD)的系统网络实验室开发,旨在为研究人员和工程师提供一个灵活、高效的平台,用于开发和测试高速网络协议。
你可以把它理解为一个**"软件定义的网卡蓝图"**,允许开发者在 FPGA 硬件上定制自己的网卡逻辑,而不是购买功能固定的商业网卡。
| 特性 | 详细规格 |
|---|---|
| 网络速率 | 支持 10G / 25G / 100G 以太网 |
| 接口总线 | PCI Express Gen 3 (x8/x16) |
| DMA 引擎 | 自定义的高性能 PCIe DMA 引擎,支持零拷贝和散列/聚合 |
| 队列管理 | 支持 1000+ 个传输、接收、完成和事件队列 |
| 时间同步 | 支持 IEEE 1588 PTP 硬件时间戳(亚纳秒级精度) |
| 软件支持 | 提供 Linux 内核驱动程序,与操作系统网络栈深度集成 |
英语
"even more reason to" 的意思是"更有理由去做某事"。它通常用在已经存在一个理由的基础上,强调当前提到的情况让做某件事的必要性或紧迫性变得更强了。
orchestration: fix overly broad exceptions raised