本文适用于汽车电子工程师、嵌入式开发人员、硬件选型决策者。将系统解析四大电流传感器技术路线,提供详细的选型矩阵、接口设计示例、调试技巧及未来趋势预测。
一、技术路线快速选择矩阵
1.1 四大技术对比表
|----------|---------|-----------|------------|----------|-----------------|----------|
| 技术类型 | 精度 | 带宽 | 温度系数 | 单价范围 | 适用场景 | 推荐厂商 |
| 开环霍尔 | ±1% | 50-100kHz | ±0.1%/℃ | | 中低端BMS、充电桩 | |
| 闭环霍尔 | ±0.1% | 200kHz | <±0.01%/℃ | | 800V平台主回路、高端BMS | |
| 磁通门 | 0.01%FS | 10kHz | <2ppm/℃ | | 精密测量、实验室标定 | |
| TMR | ±0.5% | 1MHz | ±0.02%/℃ | | 高灵敏度应用、空间受限 | |
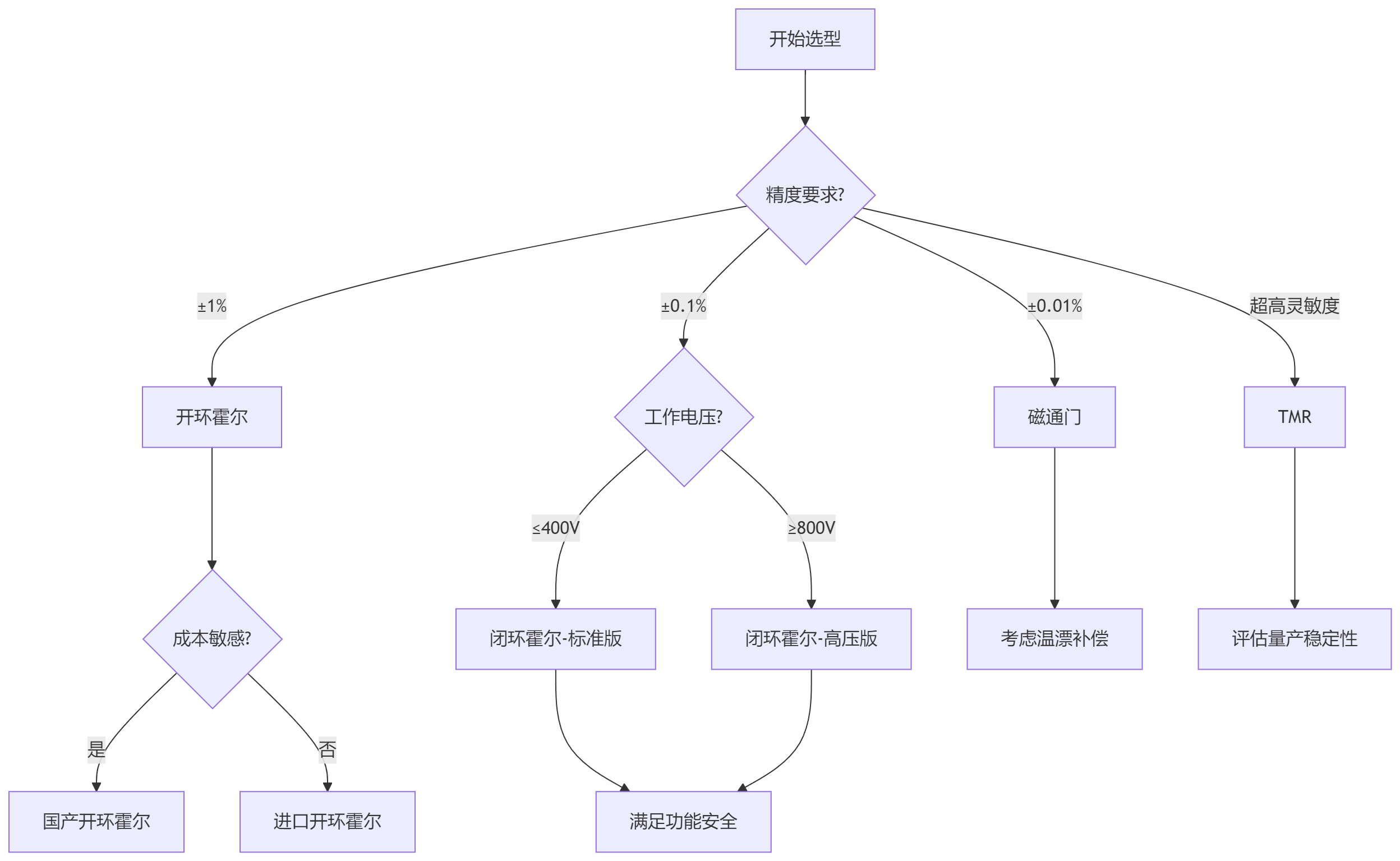
1.2 选型决策树
二、接口设计与驱动示例
2.1 典型接口配置
2.1.1 SPI接口配置
// c
// SPI配置参数
typedef struct {
uint32_t clock_freq; // 时钟频率,通常1-10MHz
uint8_t mode; // SPI模式,通常模式0或3
uint8_t data_bits; // 数据位宽,通常8位
uint8_t cs_pin; // 片选引脚
} spi_config_t;
// 电流传感器配置结构
typedef struct {
float sensitivity; // 灵敏度,mV/A
float offset; // 零点偏移,mV
uint16_t range; // 量程,A
uint8_t filter_bw; // 滤波器带宽
} current_sensor_config_t;
// 初始化函数
esp_err_t current_sensor_init(spi_config_t *spi_cfg,
current_sensor_config_t *sensor_cfg) {
// 配置SPI主机
spi_bus_config_t buscfg = {
.miso_io_num = GPIO_NUM_19,
.mosi_io_num = GPIO_NUM_23,
.sclk_io_num = GPIO_NUM_18,
.quadwp_io_num = -1,
.quadhd_io_num = -1,
.max_transfer_sz = 32
};
// 配置设备
spi_device_interface_config_t devcfg = {
.clock_speed_hz = spi_cfg->clock_freq,
.mode = spi_cfg->mode,
.spics_io_num = spi_cfg->cs_pin,
.queue_size = 1,
.flags = SPI_DEVICE_HALFDUPLEX
};
// 初始化SPI总线
ESP_ERROR_CHECK(spi_bus_initialize(SPI2_HOST, &buscfg, SPI_DMA_CH_AUTO));
ESP_ERROR_CHECK(spi_bus_add_device(SPI2_HOST, &devcfg, &spi_handle));
// 配置传感器参数
uint8_t config_data4 = {
(uint8_t)(sensor_cfg->sensitivity * 100), // 灵敏度编码
(uint8_t)(sensor_cfg->offset * 10), // 偏移编码
sensor_cfg->range >> 8, // 量程高字节
sensor_cfg->range & 0xFF // 量程低字节
};
// 发送配置数据
spi_transaction_t trans = {
.length = 32,
.tx_buffer = config_data
};
ESP_ERROR_CHECK(spi_device_transmit(spi_handle, &trans));
return ESP_OK;
}
2.1.2 模拟输出接口设计(电压型传感器)
// c
// ADC采样与电流计算
float read_current_voltage_sensor(int adc_channel, float sensitivity) {
// 读取ADC值(12位分辨率)
uint16_t adc_value = adc1_get_raw(adc_channel);
// 转换为电压(假设参考电压3.3V)
float voltage = (adc_value / 4095.0) * 3.3;
// 计算电流:I = (Vout - Voffset) / Sensitivity
float v_offset = 1.65; // 典型零点电压(半量程)
float current = (voltage - v_offset) / sensitivity;
return current;
}
// 温度补偿算法
float temperature_compensation(float raw_current, float temperature,
float tc_coefficient) {
// 简单线性温度补偿
float t_ref = 25.0; // 参考温度25°C
float compensated = raw_current *
(1 + tc_coefficient * (temperature - t_ref));
return compensated;
}
2.2 CAN FD接口配置(高端传感器)
// c
// CAN FD配置示例
typedef struct {
uint32_t bitrate; // 仲裁段波特率,通常500kbps
uint32_t data_bitrate; // 数据段波特率,通常2Mbps
uint8_t sjw; // 同步跳转宽度
uint8_t sample_point; // 采样点位置
} canfd_config_t;
// 电流传感器数据帧结构
#pragma pack(push, 1)
typedef struct {
uint32_t timestamp; // 时间戳,ms
float current; // 电流值,A
float temperature; // 传感器温度,°C
uint8_t status; // 状态字
uint8_t crc; // CRC校验
} current_sensor_frame_t;
#pragma pack(pop)
// CAN FD数据发送
void send_current_data_canfd(float current, float temp, uint8_t status) {
current_sensor_frame_t frame;
frame.timestamp = xTaskGetTickCount() * portTICK_PERIOD_MS;
frame.current = current;
frame.temperature = temp;
frame.status = status;
frame.crc = calculate_crc((uint8_t*)&frame, sizeof(frame)-1);
// 发送CAN FD帧
twai_message_t message;
message.identifier = 0x18FF5000; // 电流传感器专用ID
message.flags = TWAI_MSG_FLAG_FD | TWAI_MSG_FLAG_BRS;
message.data_length_code = sizeof(current_sensor_frame_t);
memcpy(message.data, &frame, sizeof(frame));
twai_transmit(&message, pdMS_TO_TICKS(100));
}
三、工程调试技巧与常见问题
3.1 噪声抑制措施
|----------|----------|------------|----------|
| 噪声类型 | 产生原因 | 抑制措施 | 验证方法 |
| 开关噪声 | DC-DC转换器 | 磁珠滤波、π型滤波 | 频谱分析仪 |
| 共模干扰 | 电机PWM | 屏蔽线、共模扼流圈 | 差分探头测量 |
| 地弹噪声 | 数字电路 | 地平面分割、去耦电容 | 示波器地线环路 |
| 热噪声 | 传感器本身 | 温度稳定、软件滤波 | 长期稳定性测试 |
3.2 校准流程示例
// c
// 三点校准法
typedef struct {
float zero_point; // 零点电流,通常0A
float positive_ref; // 正参考点,如+100A
float negative_ref; // 负参考点,如-100A
} calibration_points_t;
// 校准系数结构
typedef struct {
float gain; // 增益系数
float offset; // 偏移系数
float linearity; // 线性度补偿
} calibration_coeff_t;
calibration_coeff_t calibrate_current_sensor(calibration_points_t points) {
calibration_coeff_t coeff;
// 实际测量值
float measured_zero = read_sensor_output(points.zero_point);
float measured_pos = read_sensor_output(points.positive_ref);
float measured_neg = read_sensor_output(points.negative_ref);
// 计算增益:Gain = (参考值差) / (测量值差)
coeff.gain = (points.positive_ref - points.negative_ref) /
(measured_pos - measured_neg);
// 计算偏移:Offset = 零点参考 - (零点测量 * Gain)
coeff.offset = points.zero_point - (measured_zero * coeff.gain);
// 线性度评估(可选)
float expected_mid = (points.positive_ref + points.negative_ref) / 2;
float measured_mid = read_sensor_output(0); // 实际中点
coeff.linearity = fabs((measured_mid * coeff.gain + coeff.offset) - expected_mid);
return coeff;
}
3.3 常见故障排查表
|----------|----------|-----------------------------|-------------|
| 故障现象 | 可能原因 | 排查步骤 | 解决方案 |
| 输出为零 | 电源异常 | 1. 检查供电电压<br>2. 测量Vout引脚 | 确保5V/3.3V稳定 |
| 输出饱和 | 量程过小 | 1. 确认被测电流范围<br>2. 检查灵敏度设置 | 更换合适量程传感器 |
| 温漂过大 | 温度补偿失效 | 1. 测量环境温度<br>2. 验证补偿算法 | 软件补偿或硬件改进 |
| 噪声超标 | EMI干扰 | 1. 频谱分析<br>2. 检查布线 | 增加滤波、优化布局 |
四、行业趋势与选型建议
4.1 技术发展趋势预测
2025-2028年(短期):
• 开环霍尔 :继续主导中低端市场,成本进一步下降
• 闭环霍尔 :在800V平台渗透率突破80%
• 磁通门 :高端BMS标配,国产化率提升至40%
• TMR :小批量应用于高端车型,技术逐步成熟
2028-2032年(中期):
• 集成化 :传感器集成温度、电压监测功能
• 智能化 :边缘计算能力,实现本地故障诊断
• 标准化 :接口协议统一(CAN FD为主流)
4.2 针对不同应用场景的选型建议
场景1:成本敏感型项目(A级车、商用车型)
• 推荐技术 :开环霍尔传感器
• 关键指标 :成本<30元、精度±2%、工作温度-40~125°C
• 推荐厂商 :芯森电子、Allegro中低端系列

场景2:高性能车型(800V平台、豪华车型)
• 推荐技术 :闭环霍尔传感器
• 关键指标 :精度±0.1%、带宽>200kHz、功能安全ASIL D
• 推荐厂商 :LEM、Melexis、Infineon
场景3:精密测量与标定(实验室、研发测试)
• 推荐技术 :磁通门传感器
• 关键指标 :线性度<0.01%FS、温漂<5ppm/℃、长期稳定性
• 推荐厂商 :Yokogawa、瑞士LEM、Keysight
场景4:空间受限应用(域控制器集成)
• 推荐技术 :TMR传感器
• 关键指标 :尺寸<5mm²、功耗<2mW、响应时间<10μs
• 推荐厂商 :TDK、MultiDimension、Allegro新一代
4.3 供应链安全策略
-
双源策略 :关键型号准备至少两家供应商
-
国产替代路线图 :制定3年国产化替代计划
-
库存管理 :安全库存覆盖3-6个月需求
-
质量追溯 :建立完整的质量追溯体系
五、总结
汽车电流传感器选型需要综合考虑精度、成本、可靠性、供应链安全等多重因素。随着新能源汽车和智能驾驶的快速发展,电流传感器技术路线正在快速演进:
• 短期 :开环霍尔主导性价比市场,闭环霍尔抢占800V平台
• 中期 :磁通门成为高端标配,TMR技术逐步成熟
• 长期 :智能化、集成化、标准化成为主要趋势
工程实践中,需要重点关注:
-
接口设计 :根据系统架构选择合适的通信接口
-
噪声抑制 :针对应用环境采取有效的EMC措施
-
校准维护 :建立完善的校准流程与维护体系
-
故障诊断 :实现传感器健康状态实时监测
随着国产化替代的深入推进,本土电流传感器企业将在中高端市场实现更大突破,为汽车电子工程师提供更多优质选择。