【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
前面的文章说了常用的两种接口,一种是axi-lite接口,这种接口最为常见。还有一种接口是maxi接口,这种接口一般用于ddr访问。事实上除了这两种接口之外,还有一种接口,那就是axis接口。这是一种数据流接口,用的最多的地方,就是图像处理。
1、视频流
所谓的视频流,一般来自于两个地方,一个是mipi camera,或者是dvp camera,这都是可以的。但是对于低端的zynq soc来说,mipi接口不太现实。因此,还有一个选择,那就是usb camera。很多情况下,可以usb接口先读取到camera的数据,然后交给pl来处理,这是非常常见的一个方式,当然这种方式需要linux+usb+uvc的支持。
2、opencv算法
对于图像处理来说,opencv基本是标配。但是opencv如果用cpu来算的话,效率比较低。这种情况下,一般就会选择用pl对算法进行加速处理。如果加上一些寄存器的配置,这种情况下就会涉及到axi-lite、axis两种接口。
3、hls源代码文件类型
由于hls中涉及opencv hls版本的调用,源代码类型需要调整为cpp,不然有可能编译不过。
4、灰度图像处理
整个代码比较简单,一方面是流程简单,一方面是接口简单。流程方面,就是ip从axis拿到图像之后,直接转成灰度图,再借助于axis接口送出去。接口方面,如之前所描述的那样,包含了axi-lite和axis两种接口。
#include <hls_video.h>
#define MAX_HEIGHT 800
#define MAX_WIDTH 1280
typedef hls::stream<ap_axiu<24,1,1,1> > AXI_STREAM;
typedef hls::Mat<MAX_HEIGHT, MAX_WIDTH, HLS_8UC3> RGB_IMAGE;
typedef hls::Mat<MAX_HEIGHT, MAX_WIDTH, HLS_8UC1> GRAY_IMAGE;
void led_control(AXI_STREAM& input_stream,
AXI_STREAM& output_stream,
int rows,
int cols)
{
#pragma HLS INTERFACE s_axilite port=cols
#pragma HLS INTERFACE s_axilite port=rows
#pragma HLS INTERFACE axis port=output_stream
#pragma HLS INTERFACE axis port=input_stream
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS DATAFLOW
RGB_IMAGE img_0(rows, cols);
GRAY_IMAGE img_1(rows, cols);
RGB_IMAGE img_2(rows, cols);
hls::AXIvideo2Mat(input_stream, img_0);
hls::CvtColor<HLS_RGB2GRAY, HLS_8UC3, HLS_8UC1>(img_0, img_1);
hls::CvtColor<HLS_GRAY2RGB, HLS_8UC1, HLS_8UC3>(img_1, img_2);
hls::Mat2AXIvideo(img_2, output_stream);
}5、综合、导出rtl
这部分流程是标配,不再赘述。
6、创建vivado测试工程
为了验证ip是否正确,需要创建一个vivado工程。通常除了添加cpu之外,我们还会添加一下gpio、uart,这样一个最小系统就准备好了。
7、设置ip地址,导入ip
vivado准备好了之后,就可以设置ip路径,准备导入ip。ip本身只能接收图像输入,此外还需要一个接口来接收处理后的图像。在block design上面,这一工作一般是由vdma来完成的。
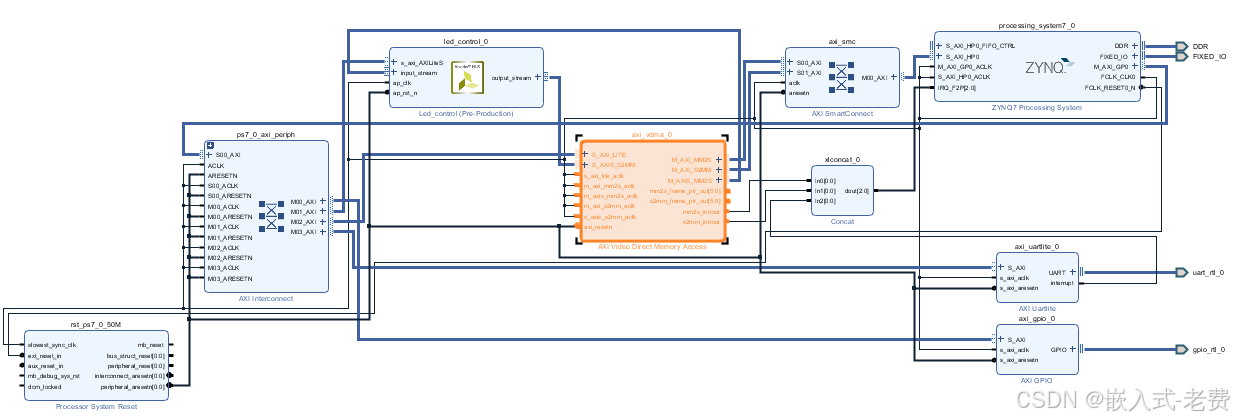
框图中有一个地方需要注意下,vdma默认接收的图象是32位的,这里我们hls ip默认是24位,所以vdma需要调整下。此外,中断信号有三个来源,所以,这里还添加了一个concat ip。
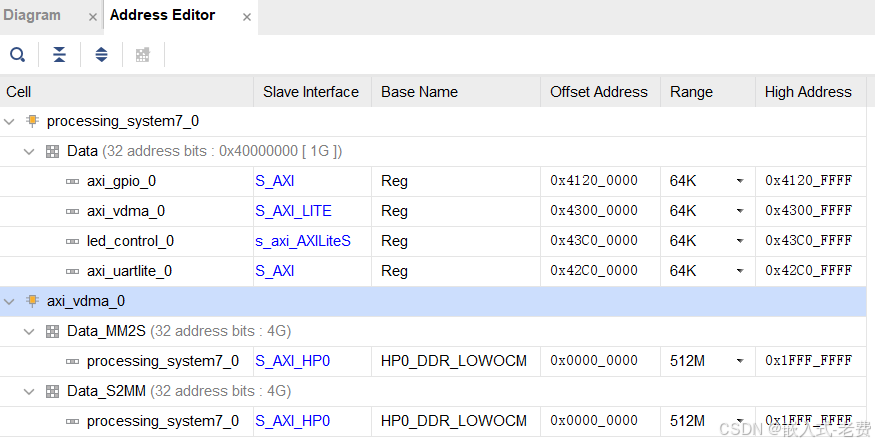
8、确认验证
所有ip、连线都ok之后,就可以使用厂家提供的验证工具确认一下,是不是真的ok。当然,因为涉及到几个外设ip,对应的地址范围也要确认一下,