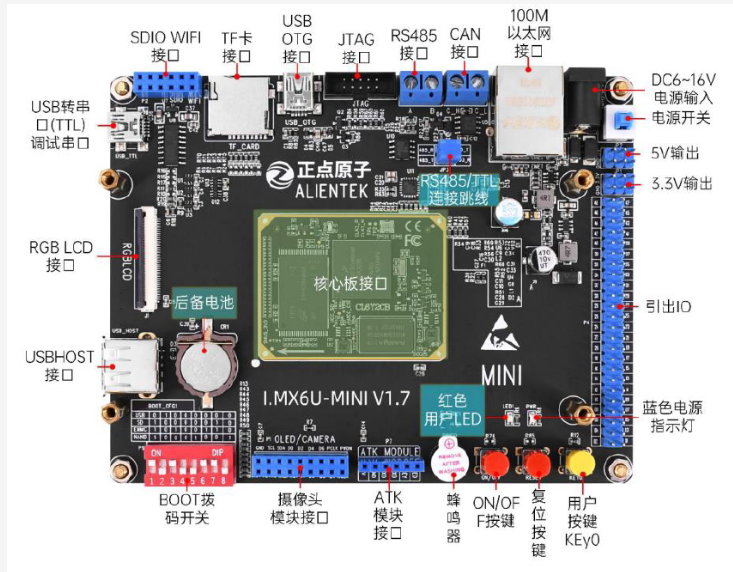
本篇使用得开发板是IMX6ULL------MINI
一、交叉编译工具链安装(通用方法)
-
从arm官网下载交叉编译功能,将gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz压缩包拷贝到ubuntu下
-
解压 tar -xvf gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz
-
将arm-linux-gnueabihf-gcc的路径添加进系统PATH下 --- 在家目录下的 .bashrc 文件最后加一句export PATH=$PATH:/home/linux/tools/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/
-
查看arm-linux-gcc的版本, arm-linux-gnueabihf-gcc -v , 如果是4.9则成功
二、imx6ull硬件控制(LED)
1. 查看原理图,确定硬件连接关系
-
目标: 找到LED灯在开发板上连接的具体GPIO引脚。
-

-
分析结果:
-
LED0连接到引脚 GPIO1_IO03。
-
工作逻辑 : 当GPIO1_IO03输出 低电平(0) 时,LED0导通并发光;当输出 **高电平(1)** 时,LED0截止,熄灭。
-
结论: 通过控制GPIO1_IO03的电平状态(0或1)即可实现LED的亮灭控制。
-
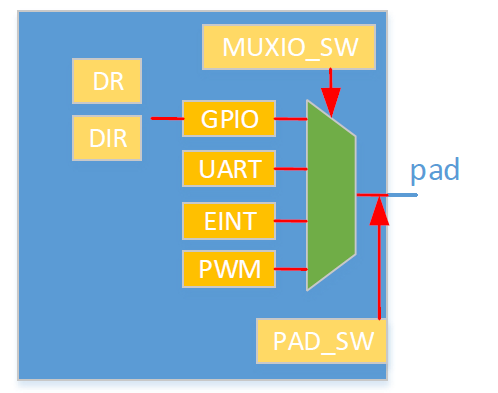
2. 配置
---选择引脚功能(MUXIO_SW)
---配置引脚电气特性(PAD_SW)
---配置引脚方向(DIR)
---输出高低电平(DR)
-
(1) 选择引脚功能 (MUXIO_SW)
查看IMX6ULL参考手册可以找到GPIO3的选择引脚功能寄存器(SW_MUX)
-
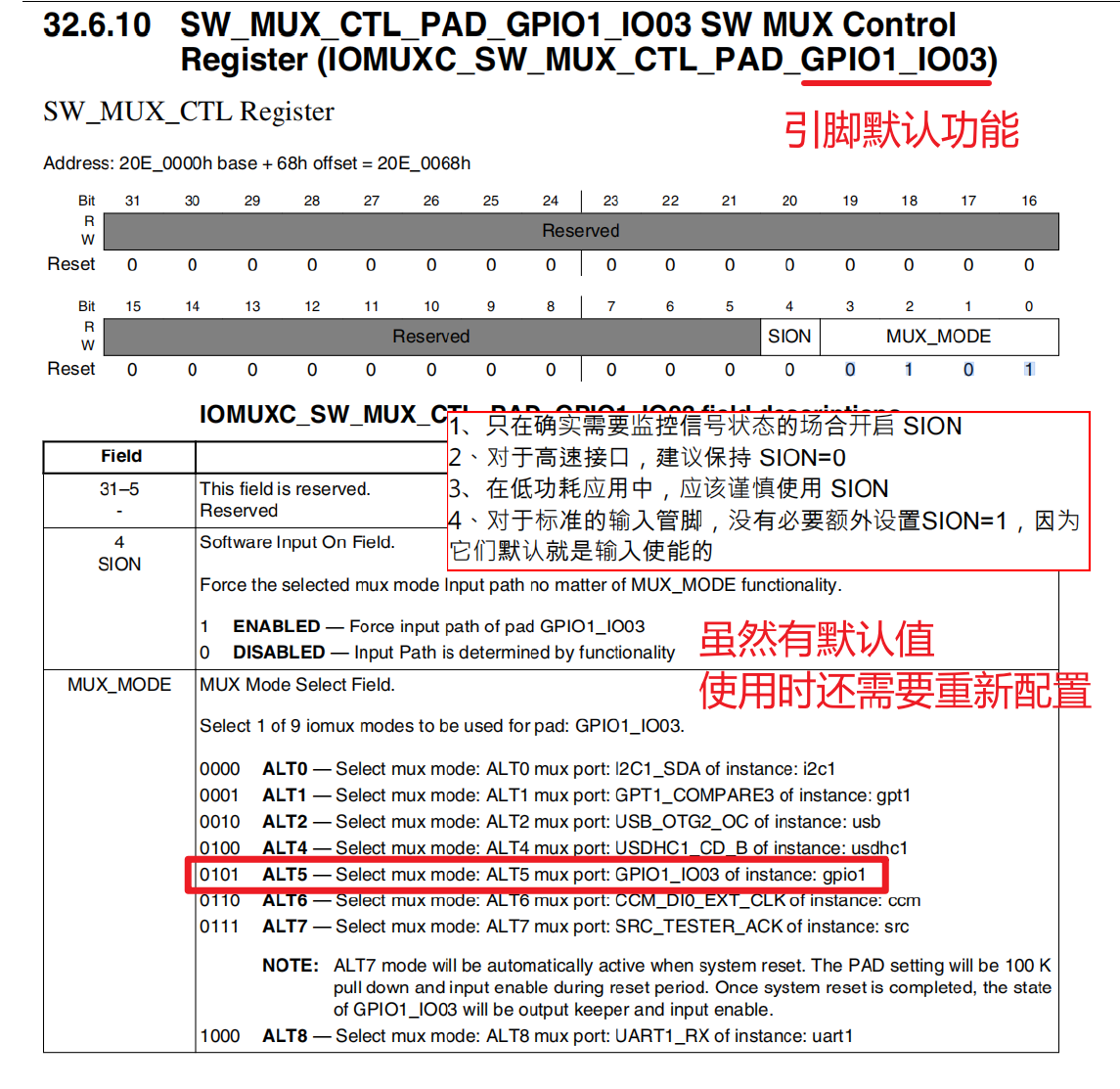 由图不难看出,将IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03寄存器的低4位设置为0x0005,即将GPIO1_IO3引脚功能设置为GPIO。
由图不难看出,将IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03寄存器的低4位设置为0x0005,即将GPIO1_IO3引脚功能设置为GPIO。 -

-
(2) 配置引脚电气特性 (PAD_SW)
-
查看IMX6ULL参考手册可以找到GPIO3的配置引脚电气特性寄存器(SW_PAD)
将IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03寄存器的低4位设置为0x10b0,GPIO1_IO3引脚使用默认的电气属性

-
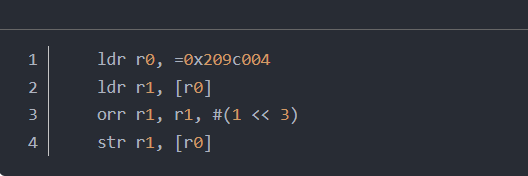
(3) 配置引脚方向和电平 (GDIR和DR)
-

GDIR (GPIO Direction Register) : 设置引脚方向。写
1为输出模式,写0为输入模式。-
-
DR (Data Register) : 设置引脚输出电平。写
0输出低电平,写1输出高电平。 -
-
三、写代码
1. 整体代码
-
会IMX6ULL的硬件控制原理后,这里就开始写代码,在unbuntu下使用交叉编译器arm-linux-gnueabihf-gcc就无须像keil4上面一样那么繁琐:
在GNU中可以直接用**.global _start**
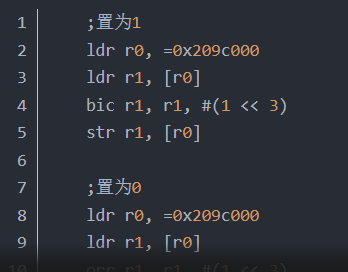
*cs.global _start ;上面一句可代替下面内容 area reset, code, readonly code32 entrycs.global _start _start: ldr pc, =_reset_handler ldr pc, =_software_handler ldr pc, =_undef_handler ldr pc, =_prefetch_abort_handler ldr pc, =_data_abort_handler nop ldr pc, =_irq_handler ldr pc, =_fiq_handler _software_handler: b _software_handler _undef_handler: b _undef_handler _prefetch_abort_handler: b _prefetch_abort_handler _data_abort_handler: b _data_abort_handler _irq_handler: b _irq_handler _fiq_handler: b _fiq_handler _reset_handler: /*DDR 0x80000000 ~ 0X9FFFFFFF*/ cpsid i /*disable irq*/ ldr sp, =0x81000000 /*init system mode stack 16M */ cps #0x12 /*change to irq mode */ /* mrs r0, cpsr bic r0, r0, #0x1f orr r0, r0, #0x12 msr cpsr_c, r0 */ ldr sp, =0x82000000 /*init irq mode stack 16M */ cps #0x1f /* change to system mode */ /* mrs r0, cpsr orr r0, r0, #0x1f msr cpsr_c, r0 */ cpsie i /* enable irq */ bl led_init led: bl led_on bl led_delay bl led_off bl led_delay b led code_end: b code_end led_init: ldr r0, =0x20e0068 ldr r1, [r0] bic r1, r1, #0x1f orr r1, r1, #0x05 str r1, [r0] ldr r0, =0x20e02f4 ldr r1, [r0] /*unuse*/ ldr r1, =0x10b0 str r1, [r0] ldr r0, =0x209c004 ldr r1, [r0] orr r1, r1, #(1 << 3) str r1, [r0] ldr r0, =0x209c000 ldr r1, [r0] orr r1, r1, #(1 << 3) str r1, [r0] bx lr led_on: ldr r0, =0x209c000 ldr r1, [r0] bic r1, r1, #(1 << 3) str r1, [r0] bx lr led_off: ldr r0, =0x209c000 ldr r1, [r0] orr r1, r1, #(1 << 3) str r1, [r0] bx lr led_delay: ldr r0, =0x80001 loop_delay: sub r0, r0, #1 cmp r0, #0 bge loop_delay bx lr注意:
1.这里有些函数有下划线有些没有,是用来区分 异常处理程序、启动代码、系统内部函数 和 普通应用程序逻辑 的函数的
2.cpsid i / cpsie i:禁止IRQ中断/使能IRQ中断(i指的是IRQ,f指FIQ),cps这个指令可以直接切换arm工作模式
这个指令相当于在执行下面的内容
cscps #0x12 ;上面的等价于下面的代码 ldr sp, =0x81000000 ;初始化栈指针 mrs r0, cpsr ;将当前程序状态寄存器(CPSR)的值读取到通用寄存器 r0 bic r0, r0, #0x1f ;将 r0 的低 5 位清零(0x1F = 31)。低 5 位是 CPSR 的模式位(M[4:0]),这一步是清除当前模式 orr r0, r0, #0x10 ;将 r0 的低 5 位设置为 10000(二进制),即 用户模式(User Mode)的编码。 msr cpsr_c, r0 ;将 r0 的值写入 CPSR 的控制域(c 表示控制域,包含模式位、中断使能位等)- bx lr 相当于mov pc, lr,但比后者更好,更推荐使用
4.看手册DDR内存是0x8000 0000开始,这个板子上的DDR是一个512M的内存,所以总共大小是
0x8000 0000~0x9FFFFFFF(512MB换成十六进制是0x2000 0000)
所以SP栈寄存器的地址这里初始化为0x8100 0000(满减栈),delay函数的数值是随便设置的
四、上板(烧写)
1、使用arm-linux-gnueabihf-gcc编译文件
有了工具链,就可以编译我们led_asm.s文件了,命令为:arm-linux-gnueabihf-gcc-g-cled.s-oled_.o 。其中"-g"选项是产生调试信息,GDB能够使用这些调试信息进行代码调试。"-c"选项是编译源文件,但是不链接。"-o"选项是指定编译产生的文件名字,这里我们指定 led.s编译完成以后的文件名字为 led.o。执行上述命令以后就会编译生成一个 led.o文件。
2、使用arm-linux-gnueabihf-ld链接文件
上面的led.o文件并不是我们可以下载到开发板中运行的文件,一个工程中所有的 C文件和汇编文件都会编译生成一个对应的.o文件,我们需要将这.o文件链接起来组合成可执行文件。那么连接到底是个什么概念呢?之前我们使用Keil的时候也没有这个步骤呀?事实上我们使用的Keil是一种IDE,这种集成开发环境其实组合了编译和链接为一体,只是不需要我们手动操作罢了。
这里我们要区分"存储地址"和"运行地址"这两个概念,"存储地址"就是可执行文件存储在哪里,可执行文件的存储地址可以随意选择。"运行地址"就是代码运行的时候所处的地址,这个我们在链接的时候就已经确定好了,代码要运行,那就必须处于运行地址处,否则代码肯定运行出错。比如 I.MX6U支持 SD卡、EMMC、NAND启动,因此代码可以存储到 SD卡、EMMC或者 NAND中,但是要运行的话就必须将代码从 SD卡、EMMC或者NAND中拷贝到其运行地址(链接地址)处。需要注意的是"存储地址"和"运行地址"可能是一样的,比如STM32的存储起始地址和运行起始地址都是 0X08000000。
本篇中,我们烧写到 SD卡中,上电以后 I.MX6U的内部 bootrom程序会将可执行文件拷贝到链接地址处,这个链接地址可以在 I.MX6U的内部 128KBRAM中(0X900000~0X91FFFF),也可以在外部的 DDR中。我们例程的链接地址都在 DDR中,链接起始地址为 0X87800000。I.MX6U-ALPHA开发板的 DDR容量有两种:512MB和256MB,起始地址都为 0X80000000,只不过 512MB的终止地址为 0X9FFFFFFF,而 256MB容量的终止地址为 0X8FFFFFFF。之所以选择 0X87800000这个地址是因为后面要讲的 Uboot其链接地址就是 0X87800000,这样我们统一使用 0X87800000这个链接地址,不容易记混。
确定了链接地址以后就可以使用 arm-linux-gnueabihf-ld来将前面编译出来的 led.o文件链接到 0X87800000这个地址,使用如下命令:arm-linux-gnueabihf-ld-Ttext0X87800000led.o-oled.elf
上述命令中-Ttext就是指定链接地址,"-o"选项指定链接生成的 elf文件名,这里我们命名为 led.elf。上述命令执行完以后就会在工程目录下多一个 led.elf文件。
3、用arm-linux-gnueabihf-objcopy格式转换
led.elf文件也不是我们最终烧写到 SD卡中的可执行文件,我们要烧写的.bin文件,因此还需要将 led.elf文件转换为.bin文件,这里我们就需要用到 arm-linux-gnueabihf-objcopy这个工具
arm-linux-gnueabihf-objcopy更像一个格式转换工具,我们需要用它将 led.elf文件转换为led.bin文件,命令如下:arm-linux-gnueabihf-objcopy-Obinary-S-gled.elfled.bin。上述命令中,"-O"选项指定以什么格式输出,后面的"binary"表示以二进制格式输出,选项"-S"表示不要复制源文件中的重定位信息和符号信息,"-g"表示不复制源文件中的调试信息。上述命令执行完成以后,就会在工程目录下多一个 led.bin文件。至此我们终于等到了想要的东西---led.bin文件。
4、使用arm-linux-gnueabihf-objdump反汇编(调试用的)
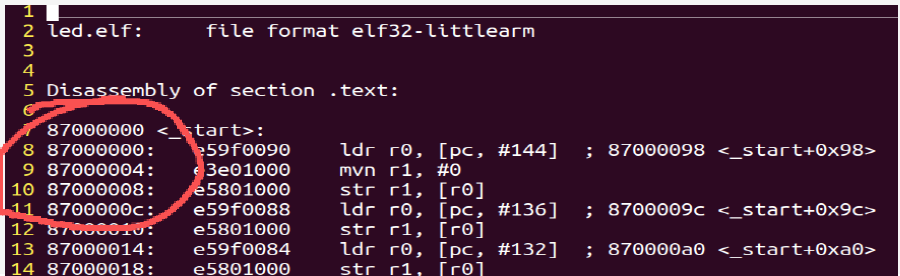
大多数情况下我们都是用 C语言写试验例程的,有时候需要查看其汇编代码来调试代码,因此就需要进行反汇编,当然这个工作目前对于我们不是必须的。一般来说可以将 elf文件反汇编,比如如下命令:arm-linux-gnueabihf-objdump-Dled.elf>led.dis 。上述代码中的"-D"选项表示反汇编所有的段,反汇编完成以后就会在当前目录下出现一个名为 led.dis文件。我们可以打开这个文件,查看其中的内容可以发现这里面都是汇编代码。注意通过 led.dis这个反汇编文件可以明显的看出我们的代码已经链接到了以 0X87800000为起始地址的区域。
5.总结命令
总结一下刚才的流程,为了编译一个led.s这个文件我们使用了如下命令:
• arm-linux-gnueabihf-gcc-g-c led.s -o led.o
• arm-linux-gnueabihf-ld -Ttext 0x87800000 led.o -o led.elf
• arm-linux-gnueabihf-objcopy -O binary -S -g led.elf led.bin
• arm-linux-gnueabihf-objdump -D led.elf > led.dis
如果我们改动哪怕一点点代码,这个流程都需要重新来一遍,很明显,这里需要创建一个Makefile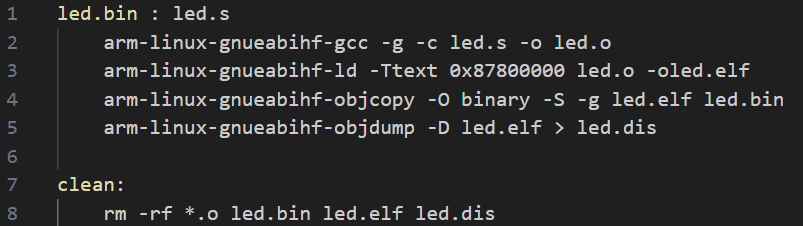
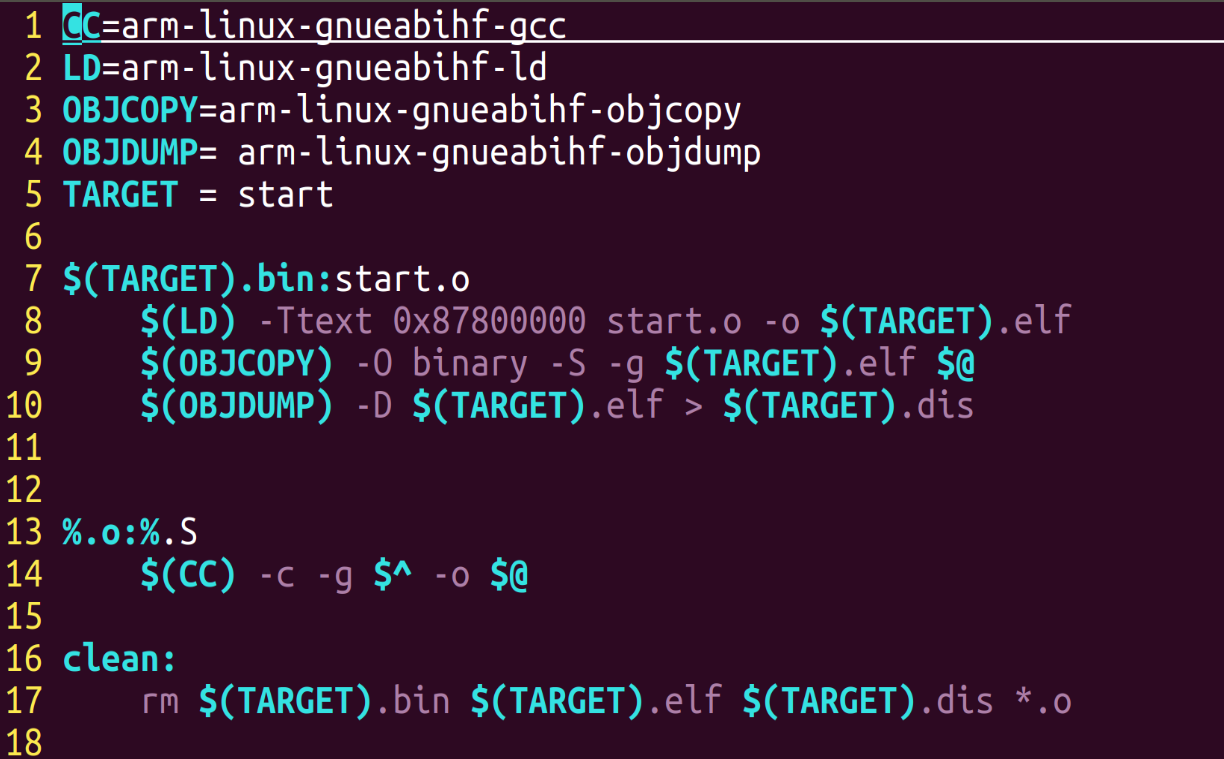
高级一点就这样:
6.烧写到SD卡中
bin文件准备就绪后,插入sd卡连接到ubuntu
把imxdownload放入当前文件夹,然后写入bin文件
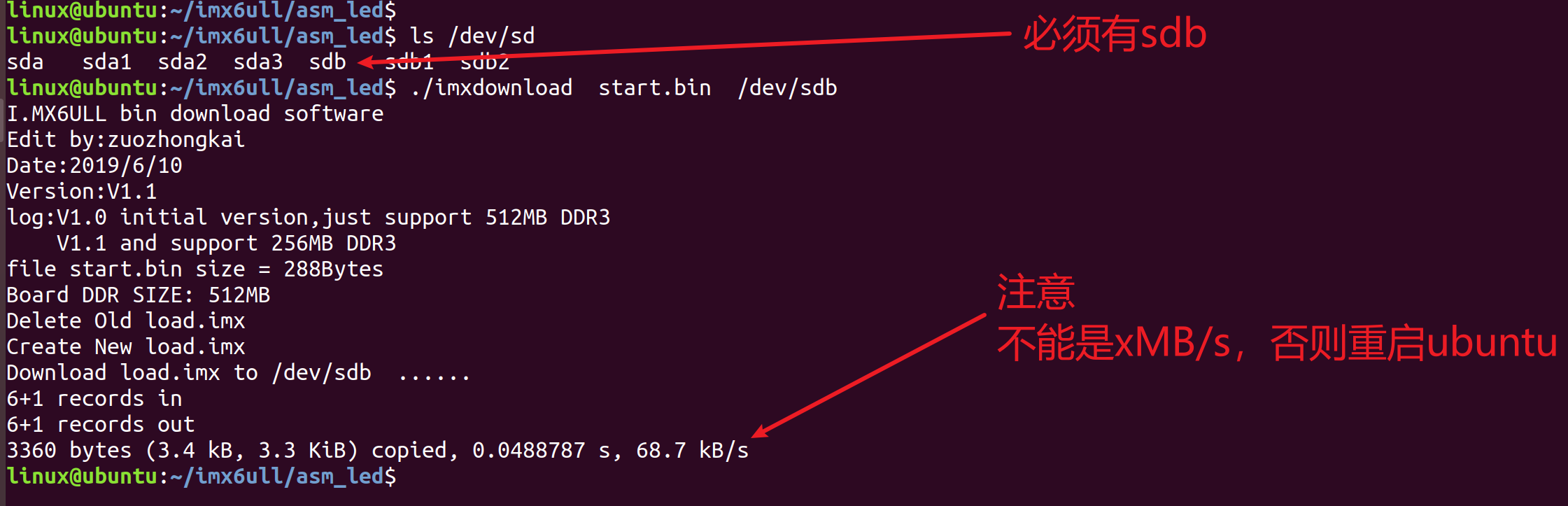
注意:这里不要把代码写错了,写成sda(sda是系统磁盘,会造成Ubuntu损坏!),记得烧录前,给ubuntu拍快照
代码已经烧写到了 SD卡中了,接下来就是将 SD卡插到开发板的 SD卡槽中,然后设置拨
码开关为 SD卡启动,拨码开关设置如图(在板子上能够清晰的看到SD卡启动模式的拨码开关为10000010)