DDS(Data Distribution Service)是OMG(Object Management Group)制定的分布式实时数据分发标准,也是ROS2放弃ROS1中心化通信架构(TCPROS/UDPROS)的核心原因。
一、DDS的核心定位与价值
1.1 定义
DDS(Data-Centric Publish-Subscribe,数据中心发布订阅)是一套面向实时、嵌入式、分布式系统 的中间件标准,核心特征是去中心化、数据为中心、可配置的服务质量(QoS),专为高可靠、低延迟的分布式通信设计------这恰好匹配机器人系统的核心需求:多传感器/执行器节点的分布式协作、控制指令的低延迟传输、关键数据的可靠送达。
1.2 核心价值(对比ROS1)
| 特性 | ROS1(TCPROS/UDPROS) | DDS(ROS2底层) |
|---|---|---|
| 架构 | 中心化(Master节点) | 去中心化(无中心节点) |
| 实时性 | 毫秒级(无硬实时保障) | 微秒/毫秒级(硬实时支持) |
| 服务质量(QoS) | 无精细化配置 | 数十种QoS策略,按需定制 |
| 多机通信 | 需手动配置网络 | 自动发现、跨机无缝通信 |
| 互操作性 | 仅ROS1节点兼容 | 跨DDS实现/跨语言/跨平台 |
对机器人开发而言,DDS解决了ROS1的核心痛点:Master单点故障、无实时性保障、多机通信复杂、无法精细化控制数据传输行为(如激光雷达点云丢包可接受,而运动控制指令必须100%送达)。
二、DDS核心架构(OMG规范)
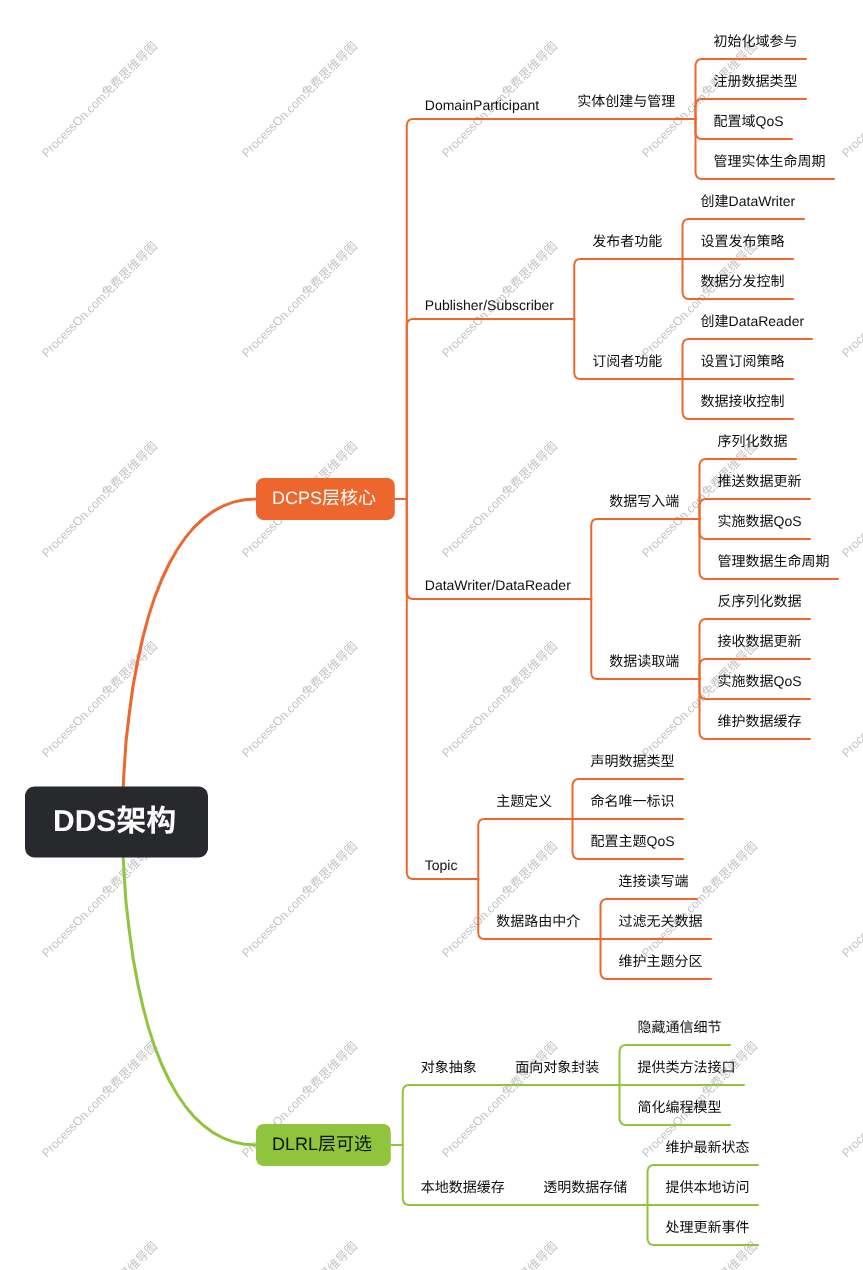
DDS的架构分为两层,其中DCPS是机器人开发的核心关注层:
2.1 两层架构
- DCPS(Data-Centric Publish-Subscribe):数据分发核心层,定义了通信的核心实体(Participant、Topic、DataWriter等)和交互规则,ROS2完全基于此层封装。
- DLRL(Data Local Reconstruction Layer):可选的面向对象抽象层,提供本地数据缓存和对象化访问接口,机器人开发中极少使用(ROS2已封装数据缓存)。
2.2 核心通信协议:DDSI-RTPS
DDS的跨实现互操作性依赖RTPS(Real-Time Publish-Subscribe) 协议(DDSI = DDS Interoperability),这是一种去中心化的实时通信协议:
- 底层基于UDP(默认)/TCP,UDP保证低延迟,TCP保证高可靠;
- 内置自动发现机制(SPDP/SEDP):无需中心节点,节点启动后自动发现同域内的其他节点和发布/订阅端点;
- 数据序列化采用CDR(Common Data Representation):跨平台、高效,ROS2的msg消息序列化完全基于CDR。
三、DDS核心概念(ROS2映射C++示例)
所有DDS通信都基于以下核心实体,且每个实体都与ROS2的概念一一对应,先明确映射关系:
| DDS实体 | ROS2对应概念 | 核心作用 |
|---|---|---|
| Domain(域) | ROS_DOMAIN_ID环境变量 | 逻辑隔离通信空间,同ID才互通 |
| DomainParticipant | Node(节点) | DDS通信的入口,每个节点一个 |
| Topic(主题) | Topic(话题) | 数据的逻辑标识(名称+类型) |
| Publisher | Publisher(发布者) | 管理多个DataWriter |
| Subscriber | Subscriber(订阅者) | 管理多个DataReader |
| DataWriter | 发布者的底层发送端 | 实际发送数据的实体 |
| DataReader | 订阅者的底层接收端 | 实际接收数据的实体 |
3.1 Domain(域)
- 本质:一个逻辑隔离的通信空间 ,用Domain ID(0~232) 标识;
- 核心规则:只有相同Domain ID的DDS实体才能互相通信;
- ROS2实战:通过环境变量
export ROS_DOMAIN_ID=1修改域ID,可隔离不同机器人/测试场景的通信(如车间1的机器人用ID=1,车间2用ID=2)。
Domain ID的范围解释如下:
- DDS(Data Distribution Service)使用Domain ID来计算用于发现和通信的UDP端口
- UDP端口是16位无符号整数,取值范围是0-65535
- 通过公式UDP_Port = Base_Port + (Domain_ID × Offset)计算端口
- 经过计算,最大可分配的Domain ID为232,最小Domain ID为0
3.2 DomainParticipant(域参与者)
- 定义:DDS通信的"根节点",所有其他实体(Publisher/Subscriber/Topic)都必须依附于Participant;
- C++创建示例(基于FastDDS,ROS2 Humble默认DDS):
cpp
#include <fastdds/dds/domain/DomainParticipant.hpp>
#include <fastdds/dds/domain/DomainParticipantFactory.hpp>
#include <fastdds/dds/domain/qos/DomainParticipantQos.hpp>
// 创建Participant QoS(默认配置)
eprosima::fastdds::dds::DomainParticipantQos participant_qos;
participant_qos.name("robot_arm_node"); // 对应ROS2节点名
// 创建DomainParticipant(Domain ID=0)
eprosima::fastdds::dds::DomainParticipant* participant =
eprosima::fastdds::dds::DomainParticipantFactory::get_instance()->create_participant(
0, // Domain ID
participant_qos
);
if (participant == nullptr) {
// 异常处理:创建失败(如权限不足、DDS核心库未加载)
throw std::runtime_error("Failed to create DomainParticipant");
}3.3 Topic(主题)
- 定义:数据的"逻辑标签",由名称 (如
/imu/data)和数据类型 (如sensor_msgs::msg::Imu)组成,是发布/订阅的核心关联点; - 核心规则:发布者和订阅者必须订阅相同名称+相同数据类型的Topic才能通信;
- C++创建示例(绑定ROS2 msg类型):
cpp
#include <fastdds/dds/topic/Topic.hpp>
#include <fastdds/dds/topic/TopicQos.hpp>
// ROS2 msg自动生成的DDS类型(Humble中路径)
#include "sensor_msgs/msg/Imu_.hpp"
// 创建Topic QoS(默认配置)
eprosima::fastdds::dds::TopicQos topic_qos;
// 注册数据类型(Imu_是ROS2 Imu msg对应的DDS类型)
participant->register_type(new sensor_msgs::msg::Imu_TypeSupport());
// 创建Topic(名称+数据类型名)
eprosima::fastdds::dds::Topic* topic =
participant->create_topic(
"/imu/data", // Topic名称
"sensor_msgs::msg::Imu", // 数据类型名
topic_qos
);3.4 Publisher/Subscriber & DataWriter/DataReader
- Publisher:管理一组DataWriter,是"发布端的管理器";
- Subscriber:管理一组DataReader,是"订阅端的管理器";
- DataWriter:绑定一个Topic,是实际发送数据的"最小单元";
- DataReader:绑定一个Topic,是实际接收数据的"最小单元";
- C++发布数据示例:
cpp
#include <fastdds/dds/publisher/Publisher.hpp>
#include <fastdds/dds/publisher/DataWriter.hpp>
#include <fastdds/dds/publisher/qos/PublisherQos.hpp>
#include <fastdds/dds/publisher/qos/DataWriterQos.hpp>
// 1. 创建Publisher
eprosima::fastdds::dds::PublisherQos publisher_qos;
eprosima::fastdds::dds::Publisher* publisher =
participant->create_publisher(publisher_qos);
// 2. 创建DataWriter QoS(配置可靠性为RELIABLE)
eprosima::fastdds::dds::DataWriterQos dw_qos;
dw_qos.reliability().kind = eprosima::fastdds::dds::RELIABLE_RELIABILITY_QOS; // 可靠传输
dw_qos.history().kind = eprosima::fastdds::dds::KEEP_LAST_HISTORY_QOS; // 保留最后10个样本
dw_qos.history().depth = 10;
// 3. 创建DataWriter
eprosima::fastdds::dds::DataWriter* data_writer =
publisher->create_datawriter(topic, dw_qos);
// 4. 发布Imu数据
sensor_msgs::msg::Imu_ imu_data; // DDS类型的Imu数据
imu_data.header().stamp().sec(123456);
imu_data.angular_velocity().x(0.1);
imu_data.angular_velocity().y(0.2);
imu_data.angular_velocity().z(0.3);
// 写入数据(同步发布)
data_writer->write(&imu_data);- C++订阅数据示例(注册回调):
cpp
#include <fastdds/dds/subscriber/Subscriber.hpp>
#include <fastdds/dds/subscriber/DataReader.hpp>
#include <fastdds/dds/subscriber/qos/SubscriberQos.hpp>
#include <fastdds/dds/subscriber/qos/DataReaderQos.hpp>
#include <fastdds/dds/subscriber/DataReaderListener.hpp>
// 自定义监听器:接收数据回调
class ImuListener : public eprosima::fastdds::dds::DataReaderListener {
public:
void on_data_available(eprosima::fastdds::dds::DataReader* reader) override {
sensor_msgs::msg::Imu_ imu_data;
eprosima::fastdds::dds::SampleInfo info;
// 读取数据
if (reader->take_next_sample(&imu_data, &info) == ReturnCode_t::RETCODE_OK) {
if (info.valid_data) {
// 处理数据(如打印角速度)
std::cout << "IMU angular velocity: "
<< imu_data.angular_velocity().x() << ", "
<< imu_data.angular_velocity().y() << ", "
<< imu_data.angular_velocity().z() << std::endl;
}
}
}
};
// 1. 创建Subscriber
eprosima::fastdds::dds::SubscriberQos subscriber_qos;
eprosima::fastdds::dds::Subscriber* subscriber =
participant->create_subscriber(subscriber_qos);
// 2. 创建DataReader QoS(与Writer兼容:RELIABLE)
eprosima::fastdds::dds::DataReaderQos dr_qos;
dr_qos.reliability().kind = eprosima::fastdds::dds::RELIABLE_RELIABILITY_QOS;
dr_qos.history().kind = eprosima::fastdds::dds::KEEP_LAST_HISTORY_QOS;
dr_qos.history().depth = 10;
// 3. 创建监听器和DataReader
ImuListener listener;
eprosima::fastdds::dds::DataReader* data_reader =
subscriber->create_datareader(topic, dr_qos, &listener);四、DDS核心:QoS策略
QoS(Quality of Service)是DDS的"灵魂"------通过精细化配置QoS,可满足机器人不同场景的通信需求(如激光雷达点云允许丢包,运动控制指令必须可靠)。以下是机器人开发中最常用的QoS策略:
4.1 可靠性(Reliability)
- BEST_EFFORT(尽力而为) :不保证数据送达,丢包不重传,适合高频、非关键数据(如激光雷达点云、相机图像、IMU原始数据);
- RELIABLE(可靠传输) :保证所有数据按序送达,丢包自动重传,适合低频率、关键数据(如机器人运动指令、关节控制信号、紧急停止指令);
- 兼容性规则:Writer是RELIABLE → Reader必须是RELIABLE;Writer是BEST_EFFORT → Reader可以是BEST_EFFORT/RELIABLE(但Reader收不到重传数据)。
4.2 持久性(Durability)
- VOLATILE(易失性):新订阅者只能收到订阅后的新数据(默认);
- TRANSIENT_LOCAL(本地暂存) :新订阅者能收到订阅前的最新数据,适合配置类数据(如机器人初始位姿、参数服务器数据、传感器校准参数);
- ROS2示例:创建TRANSIENT_LOCAL的QoS:
cpp
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/imu.hpp"
rclcpp::NodeOptions options;
auto node = rclcpp::Node::make_shared("imu_publisher", options);
// 自定义QoS:TRANSIENT_LOCAL + RELIABLE
rclcpp::QoS qos(10);
qos.transient_local(); // 持久性
qos.reliable(); // 可靠性
auto publisher = node->create_publisher<sensor_msgs::msg::Imu>("/imu/data", qos);4.3 历史记录(History)
- KEEP_LAST(保留最后N个) :只保留最新的N个数据样本(默认N=10),适合流数据(如IMU、里程计);
- KEEP_ALL(保留所有) :保留所有未被读取的数据(内存占用高,慎用),适合低频率、关键事件数据(如故障报警);
- 优化建议:激光雷达点云可设置
KEEP_LAST(5),减少内存占用。
4.4 其他核心QoS(机器人场景)
| QoS策略 | 作用 | 机器人场景 |
|---|---|---|
| Deadline | 定义数据发布的最大间隔,超时触发回调 | 电机控制指令(必须10ms发布一次) |
| LatencyBudget | 期望的最大传输延迟,DDS优化传输策略 | 硬实时场景(如协作机器人力控) |
| Liveliness | 检测节点/实体是否存活,超时则标记为"离线" | 避免向离线的执行器节点发送指令 |
| Partition | 在Domain内进一步逻辑隔离(如"感知模块"/"控制模块"分区) | 复杂机器人系统的模块隔离 |
4.5 QoS兼容性原则
DDS的Writer和Reader必须满足QoS兼容才能通信,核心规则:
- "严格"策略不能兼容"宽松"策略(如RELIABLE Writer不能和BEST_EFFORT Reader通信);
- "宽松"策略可以兼容"严格"策略(如BEST_EFFORT Writer可以和RELIABLE Reader通信,但Reader仍会丢包);
- ROS2中可通过
ros2 topic echo /imu/data --qos-reliability reliable验证QoS兼容性。
五、DDS在ROS2中的集成与实战
5.1 ROS2与DDS的映射关系(核心)
ROS2本质是对DDS的"上层封装",其核心组件完全映射到DDS实体:
ROS2 Node
DDS DomainParticipant
DDS Publisher
DDS Subscriber
DDS DataWriter
DDS DataReader
DDS Topic
5.2 ROS2中切换DDS实现
ROS2支持多厂商的DDS实现,通过环境变量RMW_IMPLEMENTATION切换:
bash
# 使用FastDDS(默认,高性能)
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
# 使用CycloneDDS(轻量级,嵌入式友好)
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
# 使用OpenDDS(企业级,稳定性高)
export RMW_IMPLEMENTATION=rmw_opendds_cpp5.3 主流DDS实现对比(机器人开发选型)
| 实现 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| FastDDS | 低延迟、高吞吐量、丰富QoS、ROS2默认 | 内存占用略高、配置复杂 | 工业机器人、高实时场景 |
| CycloneDDS | 轻量级、低内存、配置简单 | 高级QoS支持不足 | 嵌入式机器人、资源受限场景 |
| OpenDDS | 成熟稳定、企业级支持、跨平台性好 | 实时性略差、社区活跃度低 | 非实时的机器人监控系统 |
5.4 DDS性能优化(机器人开发实战)
- QoS优化 :
- 高频非关键数据(点云/图像):BEST_EFFORT + KEEP_LAST(5);
- 关键控制数据(运动指令):RELIABLE + TRANSIENT_LOCAL + KEEP_LAST(1);
- 传输优化 :
- 单机器人场景关闭多播,改用单播(修改FastDDS XML配置);
- 大消息(如点云)增大RTPS缓冲区(FastDDS中配置
sendBufferSize/receiveBufferSize);
- 代码优化 :
- 复用DataWriter/DataReader,避免频繁创建/销毁;
- 使用ROS2多线程spin(
rclcpp::spin_multi_threaded),避免回调阻塞; - 压缩大消息(如使用
ros2_compression插件压缩点云)。
六、DDS高级特性
6.1 DDS-Security(安全通信)
提供身份认证、数据加密、访问控制,适合工业机器人/协作机器人的安全场景:
- 认证:通过证书验证节点身份;
- 加密:传输数据AES加密;
- 访问控制:定义哪些节点可发布/订阅特定Topic;
- ROS2中通过
ROS_SECURITY_ENABLE启用,需配置安全证书。
6.2 内容过滤Topic(Content Filtered Topic)
DataReader可只接收符合过滤条件的数据,减少网络开销:
cpp
// ROS2中配置内容过滤(只接收imu_id=1的数据)
auto filter = "imu_id = 1";
auto data_reader = subscriber->create_datareader(
topic, dr_qos, &listener,
eprosima::fastdds::dds::CONTENT_FILTERED_TOPIC, filter
);6.3 多域通信(DomainBridge)
通过DomainBridge实现不同Domain之间的数据转发,适合多机器人协作场景(如车间1的机器人(Domain=1)与车间2的机器人(Domain=2)通信)。
七、常见问题与排错(机器人开发踩坑)
7.1 节点无法通信
- 原因:Domain ID不同、QoS不兼容、防火墙屏蔽多播端口(239.255.0.1:7400)、DDS实现不兼容;
- 解决:
- 检查
ROS_DOMAIN_ID是否一致; - 用
ros2 topic info /imu/data验证QoS配置; - 开放多播端口(
sudo ufw allow 7400/udp); - 统一所有节点的DDS实现(如都用FastDDS)。
- 检查
7.2 数据传输延迟高
- 原因:RELIABLE策略下数据量过大、多播风暴、缓冲区过小;
- 解决:
- 高频数据改用BEST_EFFORT;
- 关闭不必要的多播,改用单播;
- 增大FastDDS的发送/接收缓冲区。
7.3 内存泄漏
- 原因:KEEP_ALL历史策略、未释放DataReader/DataWriter、大消息未清理;
- 解决:
- 改用KEEP_LAST并设置合理depth;
- 节点退出时销毁所有DDS实体;
- 定期清理未读取的大消息。
总结
- 核心定位:DDS是ROS2的底层通信标准,去中心化、高实时、可配置QoS是其核心优势,完美适配机器人分布式通信需求;
- 核心概念:Domain(域)隔离通信,Participant是通信入口,Topic是数据标识,DataWriter/DataReader是数据收发最小单元,QoS是控制通信行为的核心;
- 实战关键:机器人开发中需根据数据类型(关键/非关键、高频/低频)配置对应QoS,优先选择FastDDS(高实时)或CycloneDDS(嵌入式),并通过优化QoS、传输方式提升通信性能。