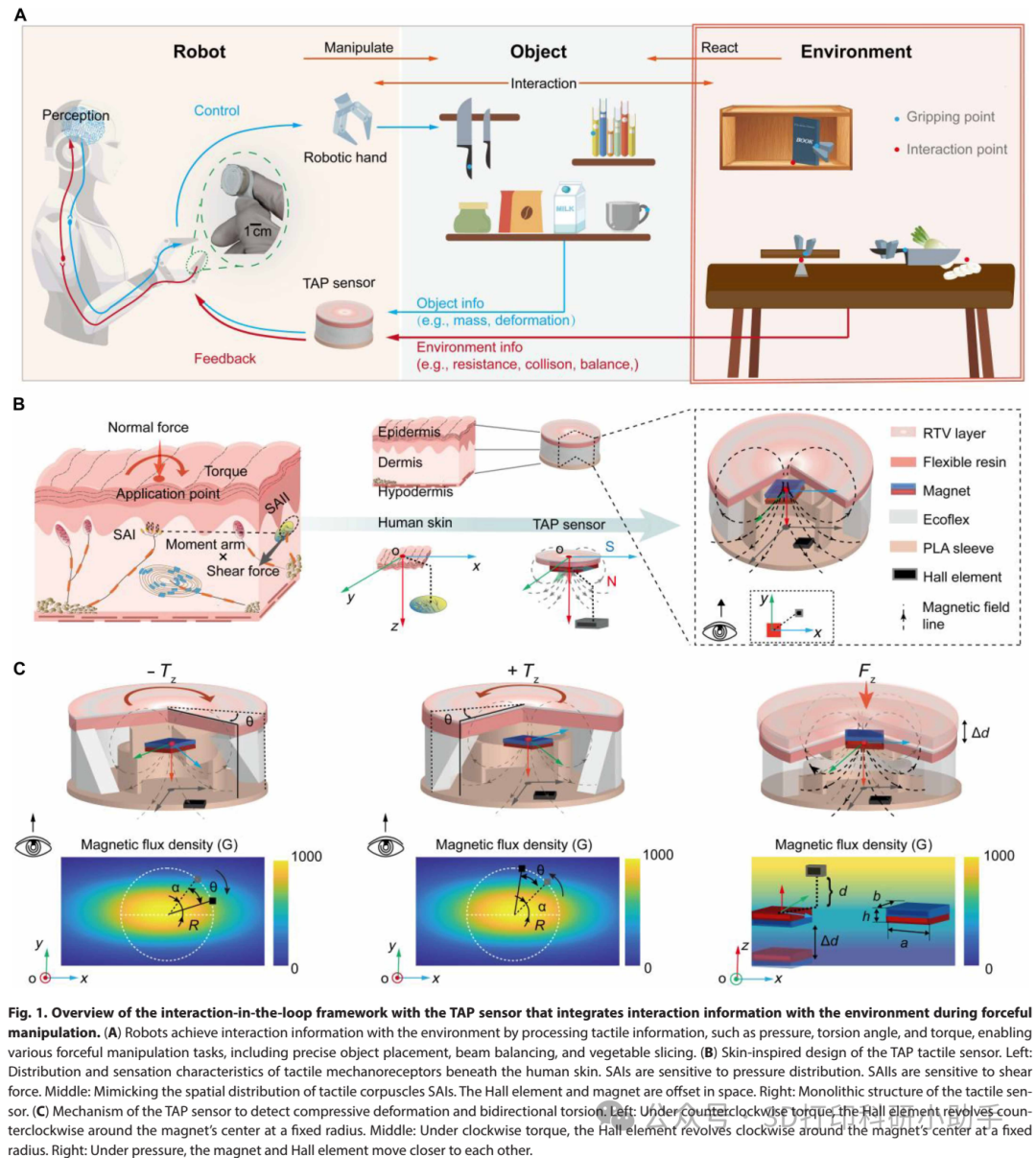
在机器人研发领域,实现类人的强力操作始终是一大难题,核心症结在于现有技术缺乏碰撞、平衡、阻力等关键的环境交互感知线索,即便借助人工智能增强的视觉系统,也难以应对物理交互中的实时变化,导致机器人在完成摆物、切菜等人类轻而易举的简单任务时屡屡受挫。同时,传统触觉传感器还存在分辨率低、测量范围窄、线性度差、无法双向检测扭矩等问题,难以精准捕捉力与位置的空间关联信息,极大限制了机器人的灵巧操作能力。
西安交通大学团队受人类皮肤触觉小体空间分布启发,研发出扭矩 - 角度 - 压力(TAP)触觉传感器,核心采用柔性 80A 树脂、RTV 硅橡胶、N35 矩形磁铁、Ecoflex 00-50 弹性体、PLA 互锁套筒框架及霍尔元件 搭建三层三明治结构;制作上结合 3D 打印、紫外固化、模铸成型、电路板封装等工艺,通过磁通量密度梯度实现感知,并建立基于麦克斯韦电磁场理论和霍尔效应的理论模型,优化磁体尺寸、霍尔元件空间偏移参数等关键设计;核心策略是打造环交互框架,将传感器精准捕捉的扭矩、角度、压力信息融入机器人控制回路,实现力和位置信息的集成感知与实时反馈,让机器人能动态调整姿态和动作。
TAP 传感器扭矩 - 扭转角感知机制与验证
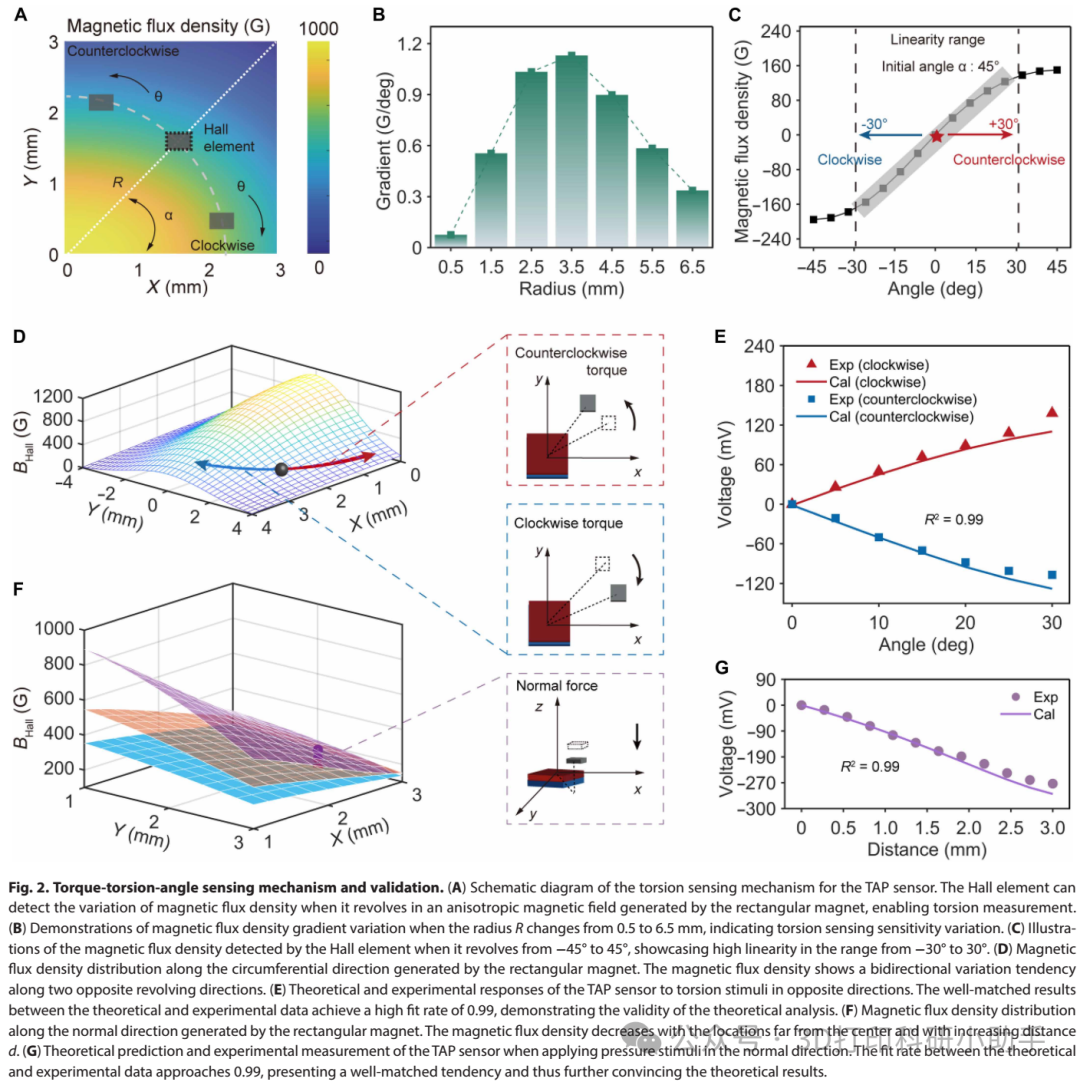
TAP感知机制,霍尔元件在矩形磁铁产生的各向异性磁场中旋转,捕捉磁通量密度变化实现扭转测量(图A)。半径 R 从 0.5-6.5mm 变化时磁通量密度梯度的改变,直接影响扭转感知灵敏度(图B)。霍尔元件在 - 45° 至 45° 旋转时,-30° 至 30° 区间内磁通量密度检测具备高线性度(图C)。矩形磁铁产生的周向磁通量密度分布,沿两个相反旋转方向呈双向变化趋势(图D)。
理论与实验数据高度匹配(R²=0.99),验证了传感器对双向扭转刺激响应的理论分析有效性(图E)。矩形磁铁法向磁通量密度分布,随距离增大逐渐降低(图F)。压力刺激下的理论与实验数据拟合度接近 0.99,进一步印证了理论模型的准确性(图G)。
TAP 传感器性能标定结果
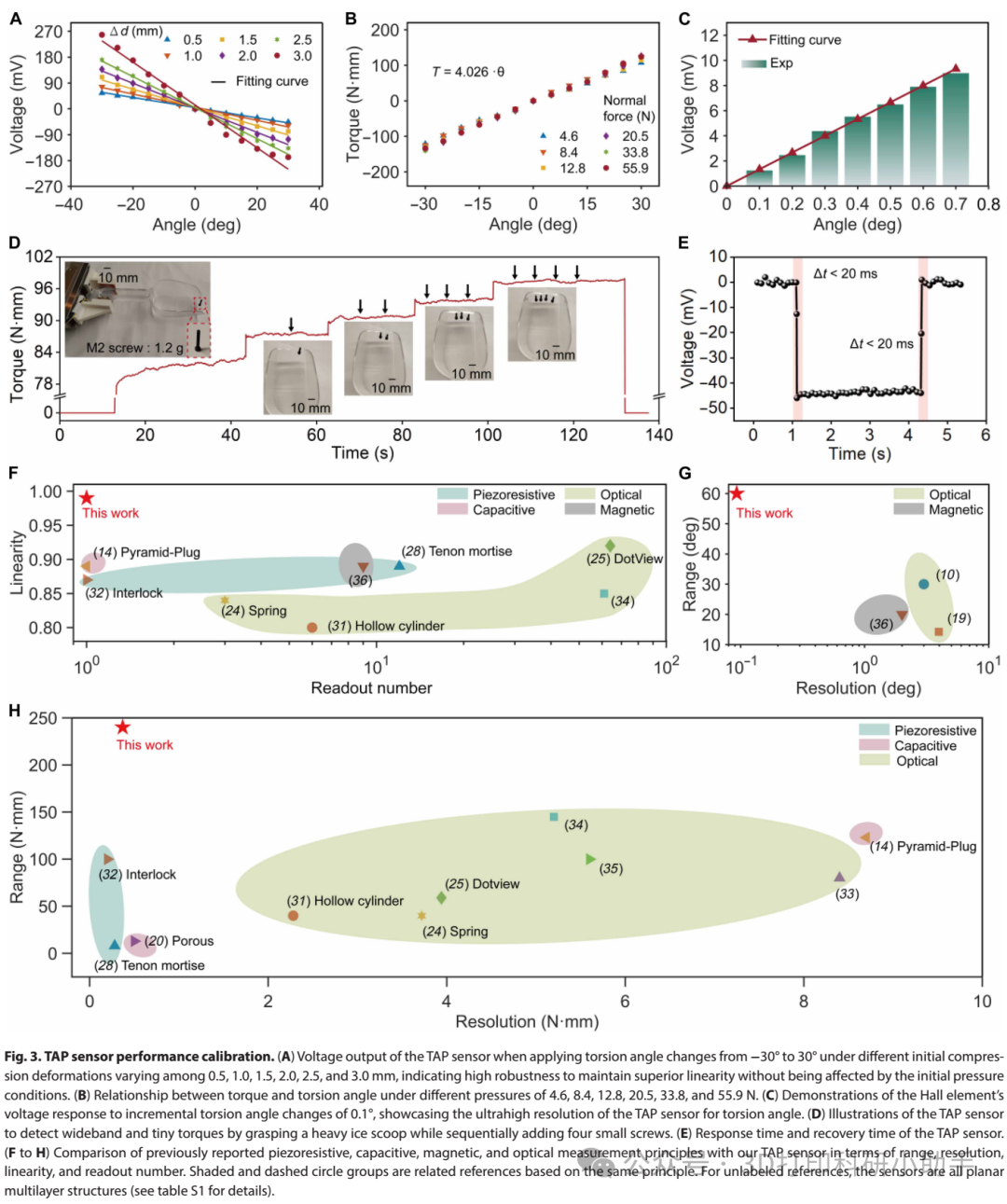
传感器在 0.5-3.0mm 不同初始压缩变形下,-30° 至 30° 扭转角变化的电压输出均保持高线性度,受初始压力影响小,鲁棒性强(图A)。 4.6-55.9N 不同压力下扭矩与扭转角的关系,标定出扭矩 - 扭转角系数为 4.03,测量范围达 ±120.9N・mm(图B)。传感器对 0.1° 增量扭转角呈现清晰的 1mV 线性电压阶跃,实现 0.1° 的超高扭转角分辨率(图C)。
传感器抓取冰勺时能精准检测四颗小螺丝依次添加的微小扭矩变化,验证实际场景下的高灵敏度(图D)。传感器响应时间和恢复时间均小于 20ms,适配动态操作(图E)。与压阻、电容、光学、磁学类传统传感器对比,TAP 传感器在分辨率、线性度、测量范围上显著领先,且单通道读出即可实现双向检测,大幅简化信号采集(图F-H)。
TAP 传感器助力机器人完成超高精度摆物任务
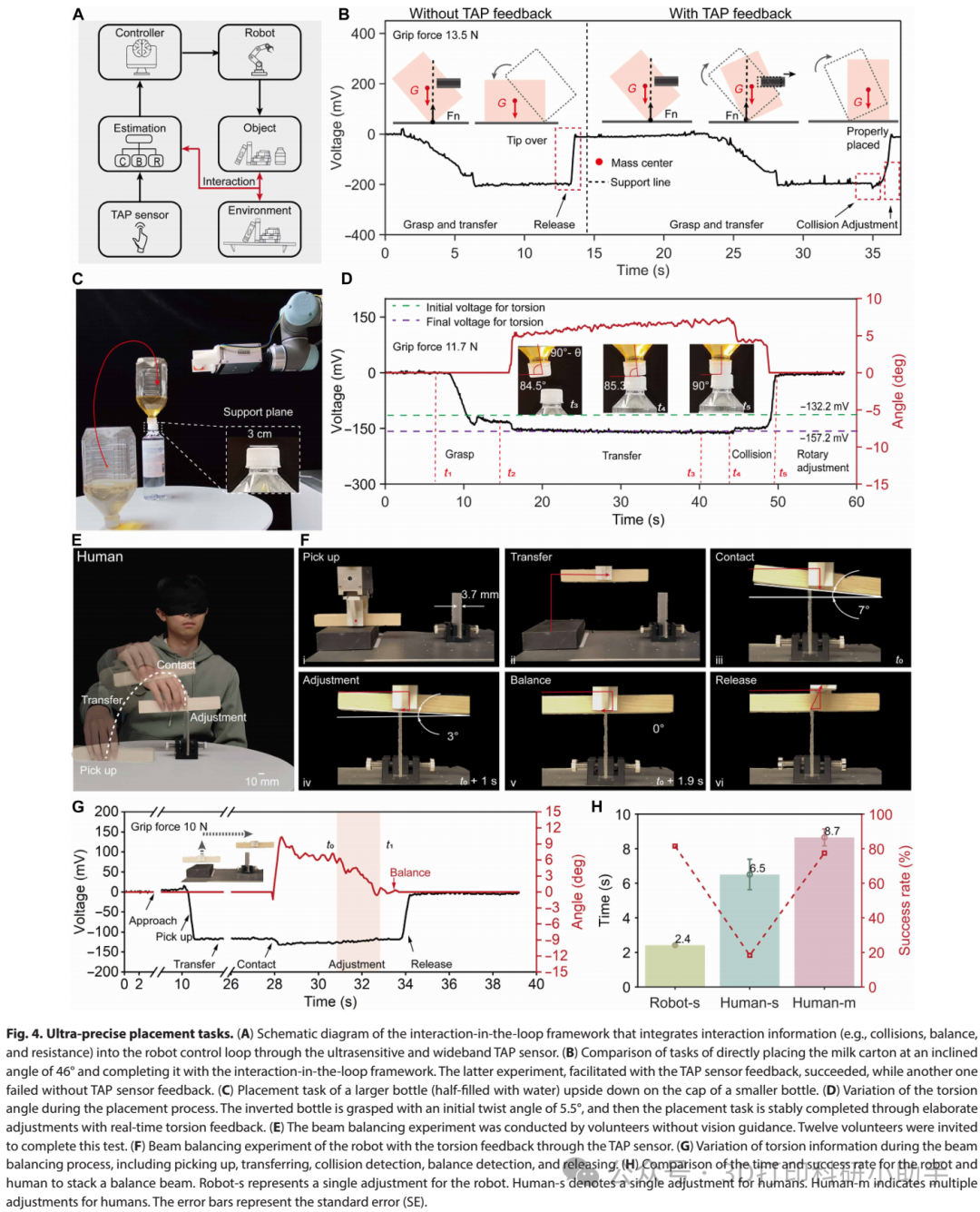
如环交互框架示意图所示,传感器在将环境交互信息实时融入机器人控制回路,实现混合力 - 位置控制(图A)。 通过对比实验,无 TAP 反馈时 46° 倾斜牛奶盒摆放失败,借助传感器反馈实现姿态动态调整,摆放成功(图B)。机器人将半瓶水的大瓶子倒扣在小瓶子瓶盖,传感器检测到初始 5.5° 扭转角,通过实时反馈微调至接近 0°,5 秒内完成稳定摆放(图C-D )。
平衡梁堆叠任务中,人类无视觉引导完成难度大,而机器人借助传感器扭矩反馈,1.9 秒即可完成,过程中精准捕捉拾取、转移、碰撞、平衡、释放各阶段的扭转信息(图E-G)。机器人单次调整完成任务平均耗时 2.4 秒、成功率 81.5%,远超人类单次调整(6.5 秒、18.3%)和多次调整(8.7 秒、77.5%)的表现(图H)。
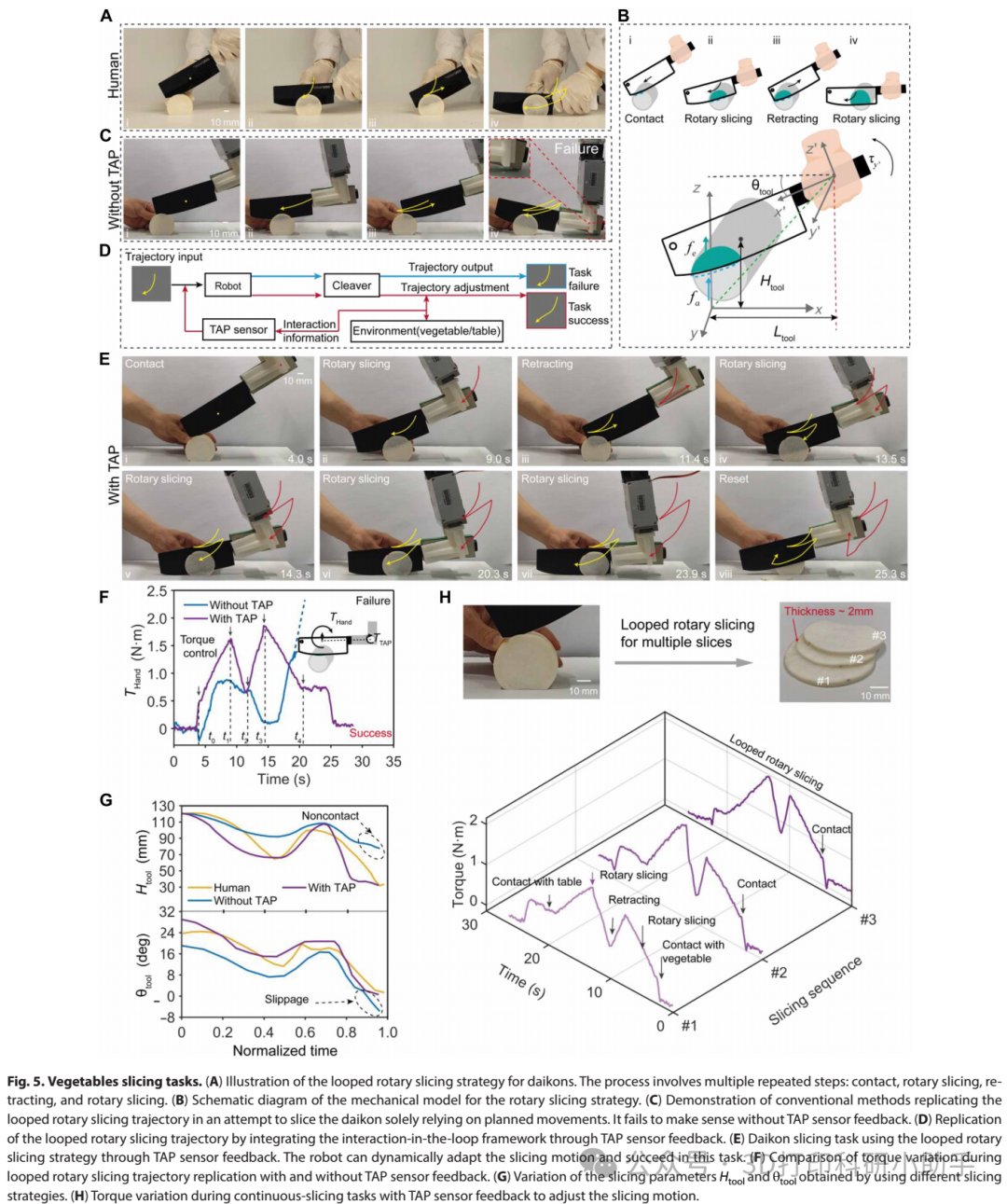
TAP 传感器实现机器人自适应蔬菜切割操作
人类切萝卜的循环旋转切割策略,包含接触、旋转切割、缩回、再次旋转切割等步骤(图A);研究建立旋转切割力学模型,揭示减小刀具倾斜角、稳定刀具与物体中心距离可降低切割阻力(图B)。传统机器人模仿人类轨迹切割萝卜,因无实时反馈,受阻力干扰任务失败(图C);融入 TAP 传感器环交互框架后,机器人可根据扭矩反馈动态调整切割轨迹,完成切割(图D)。
机器人借助传感器实现萝卜的循环旋转切割,实时检测扭矩变化,阻力过高时暂停缩回,最终 20 秒完成切割,无反馈则扭矩波动大、轨迹严重偏离(图E-F)。传感器反馈下,机器人能精准调整切割过程中的刀具高度和倾斜角,无反馈则参数紊乱(图G)。传感器支持机器人完成萝卜连续切割任务,可通过调整横向步长实现 1.2mm 的薄片切割,扭矩全程稳定可控(图H)。
该研究不仅为机器人触觉传感器的设计提供了全新的思路和方法,还推动了机器人从 "抓取" 向 "灵巧操作" 的跨越,为工业自动化、服务机器人、医疗机器人等领域的发展奠定了关键的技术基础,让机器人真正拥有类人触觉与操作能力迈出了实质性的一步。未来随着传感器小型化、多模态感知的优化,机器人的灵巧操作能力还将持续提升,进一步拓展人机协作的应用边界。