在具身智能(Embodied AI)研究加速发展的当下,高质量力-位混合操作数据已成为模仿学习与强化学习的关键瓶颈。传统示教缺乏力觉反馈,难以捕捉精细操作中的接触力信息;纯位置控制又无法还原真实手感,导致数据泛化能力受限。
Haply遥操UR机械臂,支持轨迹记录与复现
针对这一科研痛点,欣佰特科技正式推出自研的遥操作与数据采集新方案 ------基于Haply三轴力反馈控制器Inverse3 与UR协作机器人 的深度集成,实现双向力交互遥操作,构建从操作到数据闭环的完整科研工具链。
核心优势:真实力觉 + 精准复现
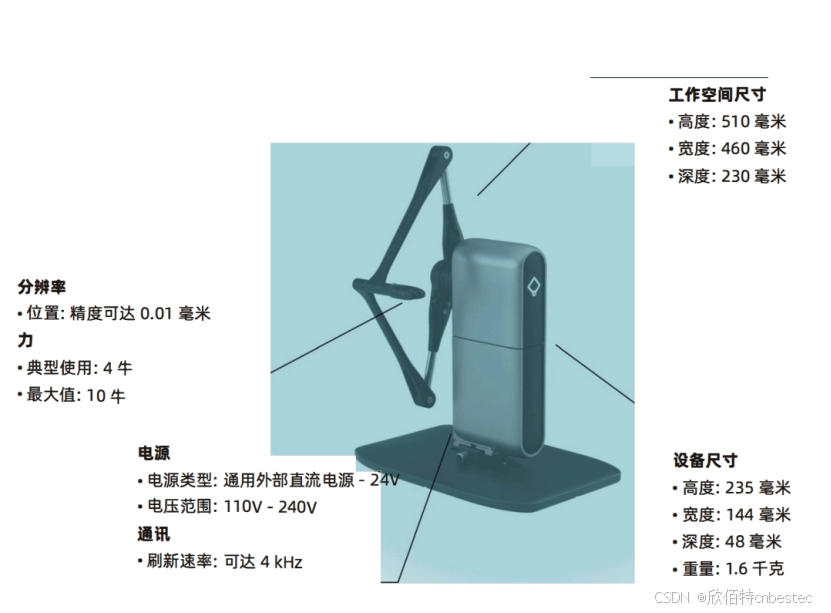
该方案以Haply力反馈控制器Inverse3 为核心输入设备。其轻量化并联机构设计(仅1.6kg),提供 510×460×230mm 超大工作空间 ,位置分辨率高达 0.01mm ,典型力反馈输出 4N(峰值10N) ,刷新率最高 4kHz,确保低延迟、高保真交互体验。
更关键的是,Inverse3力反馈控制器 内置姿态传感器与重力补偿算法 ,实现姿态无关的力觉渲染;配合 Tracked Handle 快换接口,可灵活适配夹爪、探针、手术器械等末端工具,满足多样化实验需求。
三大核心能力,赋能科研闭环
✅ 6维位姿动捕与遥操作 :操作者通过Haply Inverse3 直观控制UR机械臂,实现"手随心动"的精准映射。
✅ 实时六维力感知与3D力反馈 :机器人末端接触力实时反馈至手柄,让研究者"触摸"远程环境,支撑柔顺控制、人机物理交互等研究。
✅ 轨迹记录与复现:完整记录位置、姿态、力矩等多维数据,支持一键复现,为机器人学习提供可重复、可标注的高质量数据集。
面向前沿科研场景

该方案已在多个方向展现应用潜力:
- 具身智能与模仿学习:训练机器人完成插拔、装配等力敏任务
- 人机协作与共享控制:探索自然交互接口
- 遥操作与远程实验:验证危险或远程环境下的操作可行性
- 强化学习数据采集:获取带力觉标注的真实交互数据
系统兼容 Windows/Linux/macOS/ROS ,并支持 Unity、Unreal Engine、NVIDIA Omniverse、MATLAB/Simulink 等主流平台,便于构建"虚实联动"的数字孪生实验环境。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询++++sales@cnbestec.com++++